一种基于机器学习的无人机检测识别的后处理方法、装置及设备与流程
本技术涉及人工智能及信号处理领域,具体涉及一种基于机器学习的无人机检测识别的后处理方法、装置及设备。
背景技术:
1、近年来,无人机产业迅猛发展,商用、民用、甚至军用的趋势越来越明显,包括:合法航拍、货物运输、无人机表演、无人机竞赛、智慧农业、植物保护、灾难救援、观察野生动物、测量测绘、新闻报道、电力巡检等。与此同时,还存在一些非法应用,例如非法闯入、偷拍、投掷非法物体等,公共安全隐患越来越多。虽然很多国家对无人机的安全问题越来越重视,也逐步制定了相应的法律法规予以规范,但对上述非法应用,以及一些不规范操作、无人机失控,仅仅通过法律手段无法有效地予以管制。因此,需要使用专业设备对其进行管理,包括检测和防御。其中,无人机检测是无人机管理的基本要求。
2、目前常用的无人机侦测方法包括主动雷达探测器检测,红外摄像头检测,视觉检测,基于声音的听觉检测和基于无人机发射无线电信号的检测。专利cn202110487167.5公开了一种针对不同信号体制的无人机检测方法,具体的:采用针对特定体制信号的信号接收设备,输出其全频段频谱数据和iq数据流;采用功率谱对消方法进行降噪处理,再剔除随机噪声信号;进行特征参数提取,将其与数据库中的参数进行匹配分类和识别;对wifi体制无人机信号进行检测识别,通过解析得到的wifi体制无人机信号的mac地址与已知的无人机厂商mac地址进行匹配识别。
3、机器学习主要是通过对神经网络的训练来提取输入信号的特征。图1是一个简单的机器学习的示意图,其中,圆圈代表的是数值,箭头代表的是运算。神经网络训练的过程的实质是寻找最优的运算参数(即图1中的箭头)。本发明基于机器学习的技术,通过对神经网络的训练来生成一个最优的神经网络,之后通过该网络来进行无人机的检测与识别。
4、在基于无人机发射无线电信号的检测方面,目前已经出现基于数据增强的无人机识别方法。专利cn201910930192.9涉及一种基于频域特征的无人机遥控信号的识别方法,其对接收到的无人机信号进行混频、鉴相、采样、信道化处理获得多路信道的测频输出,实现无人机遥控信号的检测识别。
5、然而,在基于无人机的无线电信号的神经网络训练完成后,即,使用存储有经过训练的无人机识别模型的无人机识别装置进行实际的无人机识别过程中,基于以下两方面原因,识别效果仍不理想:一、在实际进行无人机信号识别时,所采集的无人机信号的收集场景往往是有限的,对有限场景下收集到的无人机信号进行识别,难以精确地识别出无人机信号。二、在使用判决网络对无人机信号片段进行判决时,依赖单个信号片段进行判决作为最终的判决结果,这往往得不到正确的结果,可靠性较差。
技术实现思路
1、本发明的目的是克服现有技术的不足,提供一种基于机器学习的无人机检测识别的后处理方法、装置及设备,在无人机识别中,无需实际提供众多场景下的无人机信号,仅需要采集常规场景下的无人机信号,之后通过信号变换,获得多场景下的无人机信号,将各信号片段送入神经网络进行识别判决,得到单个信号片段的判决结果,对连续信号的判决结果进行滑动窗口的联合判决,得到最终的判决结果。
2、机器学习主要是通过对神经网络的训练来提取输入信号的特征。本发明通过对神经网络进行训练,得到无人机识别模型,之后通过该网络来进行无人机的检测与识别。
3、本发明的具体技术方案如下:
4、第一方面,本技术提供了一种基于机器学习的无人机检测识别的后处理方法,所述方法包括:
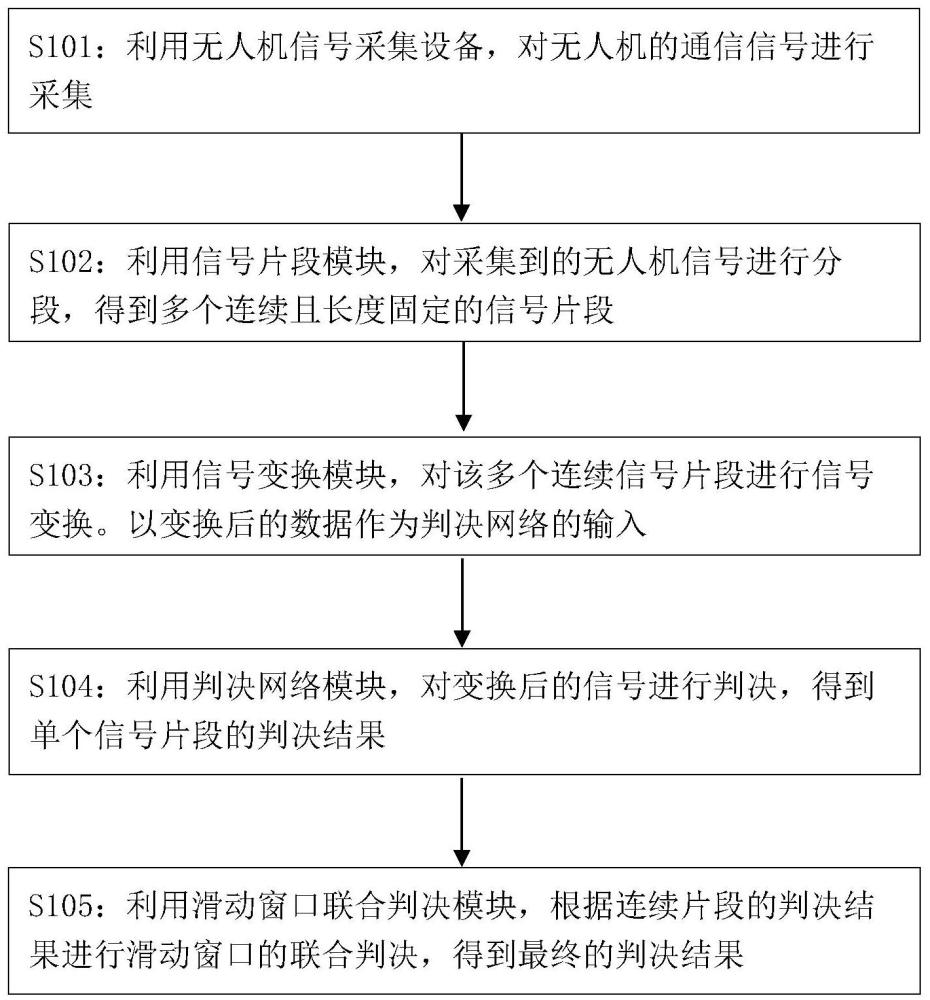
5、步骤1,利用无人机信号采集设备,对无人机的通信信号进行自动采集。
6、步骤2,对采集到的无人机信号进行分段,得到多个连续且长度固定的信号片段。
7、步骤3,对步骤2得到的信号片段进行信号变换,将变换后的信号输入判决网络中进行判决,得到单个信号片段的判决结果。
8、步骤4,根据连续片段的判决结果进行滑动窗口的联合判决。
9、在所述的步骤1中,所述无人机信号采集设备采集到的无人机的通信信号,包括无人机与地面、控制端通信时所使用的通信信号,也包括环境信号。
10、在所述的步骤1中,在采集到信号之后,将采集的信号添加至信号库中。
11、在所述的步骤3中,对信号片段进行信号变换,所述信号变换包括以下操作中的一种或多种:改变信号的传输频点,改变信号的信干比,以及改变信号的信噪比。
12、无线信道指的是以无线信号作为传输媒体的数据信号传送通道。一款无人机通常有多个无线信道,对应多个传输频点。通过改变信号的传输频点,可以模拟出无人机各个无线信道中的信号。
13、改变信号的传输频点的方法包括:假设原始信号为{x[0],x[1],x[2],...,x[n-1]},其中n为无线信号的长度。假设原始信号的信道频点为f0,该信号的所有信道频点集合为{f0,f1,...,fm},其中m为信道总数。假设数据增强参数中所需要变换的信号频点为fm,采样频率为fs,则将信号变换为:
14、
15、所述信干比变换,能够模拟出无线通信系统中接收端在接收信号时同时接收到有用信号和干扰信号的实际情况。所述信干比变换具体为:
16、假设所需的信干比为α,干扰信号为{i[0],i[1],i[2],...,i[n-1]},则另
17、
18、其中:
19、进而,将信号变换为:
20、
21、所述信噪比变换,能够模拟出无线信号传输到达接收端时由于传输距离出现不同程度的衰减的这种衰减效应。所述信噪比变换具体为:
22、假设噪声的功率为pnoise,所需的信噪比为β,则另:
23、
24、其中:
25、进而,将信号变换为:
26、
27、其中,是功率为pnoise的循环对称的零均值复高斯随机变量。
28、经过步骤3的信号变换,将待判决信号变换为多个场景下的信号,而非单一场景的信号,从而使得每次的联合判决效果大致相同。
29、在所述的步骤4中,联合判决具体为:设置滑动窗口大小为k,统计连续k个信号片段中的判定为含有目标无人机的信号片段数目,记为kpos。若kpos大于阈值,则最终判定结果为周围环境存在无人机,否则,最终判定结果为周围环境不存在无人机。
30、步骤4的多信号片段联合判决,减少了由于单一信号片段引起的误判。
31、第二方面,本技术提供了一种基于机器学习的无人机检测识别的后处理装置,所述装置包括:
32、无人机信号采集模块,对无人机的通信信号进行自动采集。
33、信号片段模块,与无人机信号采集模块连接,对采集到的无人机通信信号进行分段,得到多个连续信号片段。
34、信号变换模块,与信号片段模块连接,对该多个连续信号片段进行信号变换。以变换后的数据作为判决网络的输入。
35、判决网络模块,与信号变换模块连接,用于对变换后的信号进行判决,得到单个信号片段的判决结果。
36、滑动窗口联合判决模块,与判决网络模块连接,根据连续片段的判决结果进行滑动窗口的联合判决。
37、所述无人机信号采集模块采集到的无人机的通信信号,包括无人机与地面、控制端通信时所使用的通信信号,也包括环境信号。所述自动采集的方法步骤与前述相同,在此不再赘述。
38、所述信号变换模块,对采集的信号进行数据变换,包括以下模块中的一种或多种:传输频点变换模块、信干比变换模块、信噪比变换模块。
39、所述传输频点变换模块、信干比变换模块、信噪比变换模块,分别实现如前所述的改变信号的传输频点,改变信号的信干比,改变信号的信噪比,在此不再赘述。
40、联合判决具体为:设置滑动窗口大小为k,统计连续k个信号片段中的判定为含有目标无人机的信号片段数目,记为kpos。若kpos大于阈值,则最终判定结果为周围环境存在无人机,否则,最终判定结果为周围环境不存在无人机。
41、多信号片段联合判决,减少了由于单一信号片段引起的误判。
42、第三方面,本技术还提供了一种基于机器学习的无人机检测识别的后处理设备,所述设备包括存储器和处理器。
43、所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器。
44、所述处理器用于根据所述程序代码中的指令,执行第一方面所述的无人机检测识别的后处理方法以及无人机检测方法。
45、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现第一方面所述的基于机器学习的无人机检测识别的后处理方法以及无人机检测方法的步骤。
46、本技术的有益效果包括:
47、1、本技术提供一种经信号变换后的多信号片段判决机制,使得神经网络对于每种场景下的无人机识别效果大致相同,均能达到较高的判决准确度,避免了因单一场景、单一信号的判决结果造成的误判。
48、2、本技术在数据变换环节,对待处理信号进行任意的信号变换,将待判决信号变换为多个场景下的信号,而非单一场景的信号,从而使得每次的联合判决效果大致相同。例如,改变信号的传输频点,能够模拟出无人机各个无线信道中的信号。采用信干比变换进行数据变换,能够模拟出无线通信系统中接收端在接收信号时同时接收到有用信号和干扰信号的实际情况。采用信噪比变换进行数据变换,能够模拟出无线信号传输到达接收端时由于传输距离出现不同程度的衰减的这种衰减效应。
- 还没有人留言评论。精彩留言会获得点赞!