一种基于分布式多天线传感器的信号检测方法
1.本发明涉及信号检测技术领域,涉及一种基于分布式多天线传感器的信号检测方法。
背景技术:
2.基于局部传感器信号的分布式传感器网络具有很好的检测性能,在衰落信道下无线传感器网络的决策融合时,通过基于似然比的融合规则,可以只需要信道统计,不需要依赖瞬时信道状态信息。进一步考虑局部传感器与融合中心之间的一般正交信道模型,对局部传感器决策可以采用似然比检验(likelihood ratio test,lrt)方法,但以上研究在理想环境中会有较好的检测性能,在复杂的低信噪比环境下因信道影响传输的结果,检测性能会急剧恶化。
3.随着大规模mimo(multiple input multiple output,多输入多输出)技术在5g通信中的广泛应用,基于大规模mimo分布式检测网络的研究逐渐起步,这些研究不仅集中在蜂窝通信方面,在分布式无线传感器检测网络中更多地考虑多天线技术的使用,针对大规模mimo无线传感器网络,在文献[chawla a,patel a,jagannatham a k,et al.robust distributed detectionin massive mimo wireless sensor networks under csi uncertainty[c],2018ieee 88th vehicular technology conference(vtc-fall).ieee,2018:1-5.]中,作者提出了一种基于奈曼-皮尔逊(neyman-pearson,np)准则的最优分布式检测框架。文献[ding g,gao x,xue z,et al.massive mimo for distributed detection with transceiver impairments[j].ieee transactions on vehicular technology,vol.67,no.1,pp.604-617,jan.2018.]研究了由多个单天线传感器和大型多天线融合中心组成的分布式检测网络,进一步考虑收发器硬件损伤对检测性能的影响。但是,这些研究只考虑了在融合中心使用多天线阵列,而没有考虑多天线在传感器上的作用。此外,与5g通信不同,检测网络需要进一步考虑数据融合,这样融合中心才能做出正确的全局决策,即通信的目标更侧重于提高信道传输的吞吐量,信号检测更侧重于提高检测概率以做出准确的决策。
[0004]
综上,现有技术存在以下问题:
[0005]
(1)单天线检测研究虽然在理想环境中会有较好的检测性能,但在复杂的低信噪比环境下因信道影响传输的结果,检测性能会急剧恶化。
[0006]
(2)现有考虑多天线信号检测的研究较少,且现有研究只考虑了在融合中心使用多天线阵列,而没有考虑多天线在传感器上的作用。
技术实现要素:
[0007]
针对现有技术的不足,本发明提供了一种基于分布式多天线传感器的信号检测方法,能够实现在复杂环境下提高信号检测性能的方法。
[0008]
为实现上述目的,本发明提供如下技术方案:
[0009]
一种基于分布式多天线传感器的信号检测方法,包括以下步骤:
[0010]
在分布式检测网络中设置n个包括k个天线的无线传感器,n个包括k个天线的无线传感器与一个包括m个天线的融合中心形成虚拟的mimo信道,n个包括k个天线的无线传感器在其覆盖范围内对目标信号存在与否进行观测感知,其中,n、k以及m皆为大于或等于1的自然数;
[0011]
每个包括k个天线的无线传感器对目标信号存在与否进行信号检测感知,得到本地判决;
[0012]
n个包括k个天线的无线传感器将其本地判决的信息传到融合中心,计算全局检测概率;
[0013]
对传感器进行功率迭代优化,得到目标信号存在与否的检测结果。
[0014]
进一步地,通过似然比检验进一步得到所述本地判决,具体步骤为:
[0015]
在理想硬件的情况下,假设h0和h1分别表示目标信号的不存在和存在,第i个传感器的感知信息被建模为一个二元假设问题,模型为:
[0016][0017]
其中,θ表示由待检测的目标辐射源发出的目标信号,si表示第i个传感器接收到的测量信号,vi为第i个传感器的测量噪声,即vi服从均值为0、方差为σ
v,i
的标准复高斯随机变量的集合,σ
v,i
为第i个传感器的测量噪声的高斯分布的方差;将目标信号建模为零均值循环复高斯向量,即其中均值为0,方差σ
θ
。
[0018]
进一步地,对所述公式(1)的建模进行简化处理,具体方法为:
[0019]
第i个传感器的第k个天线以增益g
i,k
放大其测量信号si,并通过信道转发给具有m根天线的融合中心,融合中心的第m根天线接收到的信号为:
[0020][0021]
其中,g
ik
为第i个传感器的第k根天线的增益,h
i,m
表示第i个传感器与融合中心的第m根天线之间的信道增益,无线衰落信道建模为:
[0022][0023]
其中,是一个复高斯向量,di是第i个传感器到融合中心的距离,α表示路径损耗指数因子,将公式(2)带入公式(1)得到公式(4):
[0024][0025]
将根据接收到的信号ym确定目标信号的存在与否,在此称为最佳融合规则的似然比检验(likelihood ratio test,lrt)来区分h0和h1。
[0026]
进一步地,所述全局检测概率的计算方法为:
[0027]
把描述第i个传感器的单个局部检测性能的检测概率p
d,i
和虚警概率p
fa,i
定义为:
[0028][0029]
基于得到的公式(4),通过定义和计算检测概率pd和虚警概率p
fa
,对融合中心的检测性能进行评价;具体来说,目标信号存在并且被传感器检测成功的全局检测概率pd定义为:
[0030][0031]
其中,引入符号g=[g
1,1
,...,g
i,k
]
t
表示传感器各天线的放大增益,h=[h
1,1
,...,h
i,k
]是各传感器与融合中心之间的瞬时信道状态信息组成的信道增益矩阵,y表示接收到的信号,cw为y在h0下的协方差,表示信号检测阈值;
[0032]
将公式(6)重写为:
[0033][0034]
其中,替代变量替代变量cw+cs是y在h1下的协方差,cs是y在h0下的协方差;而是服从分布im表示单位矩阵,w的特征分解定义为:
[0035]
w=uguh(8)
[0036]
其中,g表示奇异值对角线矩阵,f(g)表示高斯分布的概率密度函数,公式(6)转换为
[0037][0038]
其中,u表示分解的正交矩阵,(a)是酉变换u不改变的分布,(b)因为具有两个自由度的缩放卡方分布;
[0039]
同理,无线信号不存在却被检测为存在的虚警概率p
fa
为:
[0040][0041]
根据奈曼一皮尔逊引理,通过调整检测阈值在给定虚警概率p
fa
=ε下最大化检测概率pd,其中,ε为随机给定的虚警概率常数值,根据公式(6)有将带入公式(9)得到:
[0042]
[0043]
进一步地,对不同位置传感器的功率进行优化的方法为:
[0044][0045]
其中,p=[p
1,1
,...,p
i,k
],p
i,k
为第i个传感器第k根天线的功率。
[0046]
为了进一步优化,在公式(12)中,假设m在无线信道衰落下变为无穷大,然后对f(g)进行变换和渐近分析,得到目标函数:
[0047][0048]
通过公式(13)知道只要保持不变,f(g)就会保持渐近不变;其中,σ
v,ik
表示传感器接收噪声的方差,表示di是第i个传感器到融合中心的距离。α为路径损耗指数因子,σn表示融合中心的噪声方差。
[0049]
为降低后续公式推导的复杂性,定义符号:则公式(13)的优化问题重新表示为:
[0050][0051]
为求公式(16)的有效解,为了简化公式,定义替代变量t
ik
:
[0052][0053]
则公式(16)的等价变换为:
[0054][0055]
利用增广拉格朗日函数找到了该问题的有效解;根据部分增广拉格朗日函数将式(18)重写为:
[0056][0057]
其中,l1表示增广拉格朗日函数,{λ
ik
},(i=1,...,n,k=1,...,k)代表拉格朗日
乘数,{ρ
ik
},(i=1,...,n,k=1,...,k)表示惩罚参数;使用μ
ik
=λ
ik
/ρ
ik
,作为描述它们之间关系的比例因子,将公式(19)改写为比例形式:
[0058][0059]
将公式(20)进一步写为:
[0060][0061]
进一步地,采用交替乘子法admm算法来对传感器的报告功率进行进一步优化求解,具体方法为:
[0062]
通过原始变量{x
ik
},{t
ik
}和双变量{ρ
ik
},{μ
ik
}的连续迭代来求解方程(21),对于j+1次迭代,所述admm算法包括以下步骤:
[0063]
s1:更新固定
[0064][0065]
其中,表示惩罚参数,为原始变量,其中其中为简化替代变量、为比例因子;
[0066]
通过对公式(22)中的变量进行分解和优化,找到抛物线的顶点,得到封闭表达式的解为:
[0067][0068]
s2:更新固定
[0069][0070]
为了简化理解,引入以下符号:得到公式(24)的等价变换为:
[0071][0072]
为优化,定义符号x=[x
11
,...,x
ik
]
t
,r=[r
11
,...,r
ik
]
t
,,e={e
11
,...,e
ik
},1=[1,...,1]
t
,公式(25)中的优化问题用上述符号等价表示:
[0073][0074]
s3:更新固定
[0075][0076]
s4:更新
[0077][0078]
τ的值决定惩罚函数是常量还是变量,惩罚参数的初始选择使用τ>1来提高收敛性能和减少损失。
[0079]
进一步地,采用admm算法连续迭代求解公式(21)的停止迭代条件为:
[0080][0081]
其中,ε
obj
和ε
con
是收敛公差,为常数阈值。
[0082]
进一步地,分析优化了多天线传感器的检测概率,还包括使用蒙特卡洛方法对计算的全局检测概率进仿真验证,具体方法为:随机生成传感器的位置,结合给定的传感器功率,通过传感器融合算法,提升检测概率。
[0083]
本发明的信号检测方法首先根据奈曼-皮尔逊准则和似然比检验准则,推导出最佳检测器检测概率的闭式表达式,通过多天线提高了信号的检测概率。然后,考虑到传感器能量受限,采用交替方向乘子法对传感器的功率进行优化。最后,仿真结果表明功率优化后的多天线传感器具有更好的检测性能,发现了天线数量和报告的总功率p之间的权衡关系。
[0084]
当融合中心内天线数量固定时,采用多天线传感器可以提高检测器的检测性能;当传感器的天线数量确定时,在融合中心使用不同的天线也会对检测性能产生影响,即随着天线数量的增加,检测性能会更好,最终达到性能极限。
[0085]
与现有技术相比,本发明提供了一种基于分布式多天线传感器的信号检测方法,具备以下有益效果:
[0086]
(1)本发明的信号检测方法,能够实现在复杂环境下提高信号检测性能的方法,且克服了传感器发送回融合中心时的信道衰落影响,提高了信号检测概率。
[0087]
(2)本发明的信号检测方法发现了天线数量和报告的总功率p之间的权衡关系,即在有限的功率下使用更多的天线来弥补损失,反之亦然。
[0088]
(3)本发明的信号检测方法对于大型分布式传感器网络,算法的收敛速度越快,检测速度越快。
附图说明
[0089]
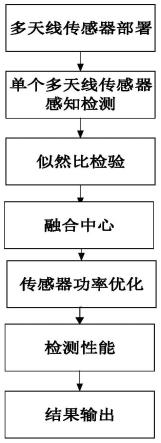
图1为本发明基于分布式多天线传感器的信号检测方法的流程图;
[0090]
图2为本发明分布式多天线传感器的信号检测示意图;
[0091]
图3为本发明多天线传感器网络中传感器天线数k=1、2、4时的检测概率pd与虚警概率p
fa
的结果图;
[0092]
图4为本发明中传感器天线数量分别为k=1、2、4时随融合中心天线数m变化的检测概率结果图;
[0093]
图5为本发明中传感器天线数量分别为k=1、2、4时随融合中心天线数m和总传感器报告功率p变化的检测概率结果图;
[0094]
图6为本发明中天线数量k=1时,各传感器admm迭代算法的收敛性能示意图;
[0095]
图7为本发明中天线数量k=2时,各传感器admm迭代算法的收敛性能示意图;
[0096]
图8为本发明中天线数量k=4时,各传感器admm迭代算法的收敛性能示意图。
具体实施方式
[0097]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0098]
除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以还包括不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
[0099]
在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本发明和简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本发明保护内容的限制。
[0100]
本发明基于分布式多天线传感器的信号检测方法,包括以下步骤:
[0101]
如图1所示,本发明基于分布式多天线传感器的信号检测方法,步骤如下:
[0102]
第一步,将多天线无线传感器和大规模mimo技术应用到分布式检测网络中,其中n个多天线传感器(传感器天线数为k)和一个具有m天线的融合中心形成“虚拟”的mimo信道,而多个传感器在其覆盖范围内进行观测感知,然后将对现象的局部判断发送到融合中心进行全局判断。如图2所示分布式多天线传感器示意图。
[0103]
第二步,多天线传感器进行本地判决。在理想硬件的情况下,假设h0和h1分别表示目标信号的不存在和存在,第i个传感器的感知信息被建模为一个二元假设问题,模型为:
[0104][0105]
其中,θ表示由待检测的目标辐射源发出的目标信号,si表示第i个传感器接收到的测量信号,vi为第i个传感器的测量噪声,即vi服从均值为0、方差为σ
v,i
的标准复高斯随机变量的集合,σ
v,i
为第i个传感器的测量噪声的高斯分布的方差;将目标信号建模为零均值循环复高斯向量,即其中均值为0,方差σ
θ
。
[0106]
第i个传感器的第k个天线以增益g
ik
放大其测量信号si,并通过信道转发给具有m根天线的融合中心,融合中心的第m根天线接收到的信号为
[0107][0108]
其中,g
i,k
可简写成g
ik
,为第i个传感器的第k根天线的增益,h
i,km
表示第i个传感器的第k根天线与fc的第m根天线之间的信道增益,h
i,m
表示第i个传感器与融合中心的第m根
天线之间的信道增益,无线衰落信道建模为:
[0109][0110]
其中,是一个复高斯向量,di是第i个传感器到融合中心的距离。由于同一传感器(或融合中心fc)的不同天线的位置相近,而且远远低于传感器和fc之间的距离,为了简化处理,同一传感器不同天线和融合中心之间的信道近似将其视为两个点进行简化处理,因此h
i,km
≈h
i,m
,而α为路径损耗指数因子。
[0111]
将公式(32)带入公式(31)得到公式(34):
[0112][0113]
将根据接收到的信号ym确定目标信号的存在与否来区分h0和h1,此方法称为最佳融合规则的似然比检验(likelihoodratiotest,lrt)。
[0114]
第三步,通过多天线将信息传到融合中心计算全局检测概率。把描述第i个传感器局部检测性能的检测概率p
d,i
和虚警概率p
fa,i
定义为:
[0115][0116]
基于得到的lrt检测器表达式,通过定义和计算检测概率pd和虚警概率p
fa
,对融合中心的检测性能进行评价。具体来说,无线信号存在并且被传感器检测成功的检测概率pd定义为
[0117][0118]
其中,为了便于推导和记忆,引入符号g=[g
1,1
,...,g
i,k
]
t
表示传感器各天线的放大增益,h=[h
1,1
,...,h
i,k
]是各传感器与融合中心之间的瞬时信道状态信息组成的信道增益矩阵,y表示接收到的信号,cw为y在h0下的协方差,表示信号检测阈值。
[0119]
将公式(36)可以重写为
[0120][0121]
其中,替代变量替代变量cw+cs是y在h1下的协方差,cs是y在h0下的协方差;而是服从分布im表示单位矩阵,w的特征分解定义为:
[0122]
w=uguh(38)
[0123]
其中,g表示奇异值对角线矩阵,f(g)表示高斯分布的概率密度函数,公式(36)转换为
[0124][0125]
其中,u表示分解的正交矩阵,(a)是酉变换u不改变的分布,(b)因为具有两个自由度的缩放卡方分布;
[0126]
同理,无线信号不存在却被检测为存在的虚警概率p
fa
为
[0127][0128]
根据np准则,通过调整决策阈值在给定虚警概率p
fa
=ε下最大化检测概率pd,其中,ε为随机给定的虚警概率常数值,根据公式(36)有将带入公式(39)得到:
[0129][0130]
第四步,推导了给定虚警概率下多天线传感器网络的检测概率。在实际应用中,由于传感器体积小、成本低、携带能量有限,为了提高传感器网络的工作时间,有必要对不同位置传感器的报告功率进行优化:
[0131][0132]
其中,p=[p
1,1
,...,p
i,k
],p
i,k
为第i个传感器第k根天线的功率。
[0133]
根据公式(41)有ln(ε)<0(因为0<ε<1),基于指数函数是递增函数,即在所有传感器的报告功率总约束下,为了最大化检测概率,需要对目标函数f(g)进行最大化设计。由于传感器报告的功率有限,必须考虑在对功率进行约束的前提下提高整个网络的检测性能。然而,由于这是一个非线性非凸优化问题,要得到最佳的g并不容易。此外,获得最佳检测需要由传感器与融合中心之间的大量瞬时信道状态信息组成的信道矩阵h,当m变大时只需要统计csi,为了进一步优化,在公式(42)中,假设m在无线信道衰落下变为无穷大,然后对f(g)进行变换和渐近分析,得到目标函数:
[0134][0135]
由公式(43)可知,只要保持不变,f(g)就会保持渐近不变,其中,σ
v,ik
表示传感器接收噪声的方差,表示di是第i个传感器到融合中心的距离。α为路径损耗指数因子,σn表示融合中心的噪声方差。如果传感器发射功率的任何降低都能被融合中心天线数量的相应增加所平衡,则可以实现渐近恒定的检测性能。
[0136]
当m
→
∞时,公式(43)中的优化问题可重新表示为
[0137][0138]
在求解公式(44)中的优化问题之前,先分析检测概率pd的上界如下
[0139][0140]
当m
→
∞,p
→
∞时,公式(45)给出了在给定虚警概率p
fa
的情况下lrt检测器可以实现的检测性能上界。
[0141]
通过前面的推导,为提高检测性能带来了重要的启发。当天线数目较大时,系统的检测性能上限是有限的,且依赖于信号方差传感器中接收噪声的方差和传感器的数量n。可以看出,达到检测性能上限的前提条件是无限m和p,此时感知报告功率的分布变得不重要。但是,对于实际系统,m和p的值不可能是无限的,因此优化将对公式(44)的性能带来显著的好处。
[0142]
为降低后续公式推导的复杂性,使用新的符号进行定义:为降低后续公式推导的复杂性,使用新的符号进行定义:因此,公式(44)可简写为:
[0143][0144]
此等式约束优化问题作为一个非凸规划问题很难解决,已被证明为多项式复杂程度的非确定性问题。为求公式(46)的有效解,首先定义
[0145][0146]
因此,公式(46)的等价变换为
[0147][0148]
利用增广拉格朗日函数找到了该问题的有效解。首先根据部分增广拉格朗日函数将式(48)重写为:
[0149][0150]
其中,l1表示增广拉格朗日函数,{λ
ik
},(i=1,...,n,k=1,...,k.)代表拉格朗日乘数,{ρ
ik
},(i=1,...,n,k=1,...,k.)表示惩罚参数。使用μ
ik
=λ
ik
/ρ
ik
,作为描述它之间关系的比例因子,公式(49)可以改写为比例形式:
[0151][0152]
在做了这些化简准备后,可以将公式(50)进一步写为:
[0153][0154]
对于多个优化变量,传统的凸优化算法很难找到最优解,而交替方向乘子法是并行处理和多元优化的一项重要技术,尤其适合解决复杂的优化问题。因此提出使用admm(alternating direction method of multipliers,交替方向乘子法)的算法来解决下面的问题,后面的仿真将证明这对于方程式(51)是非常有效的算法。具体处理为通过原始变量{x
ik
},{t
ik
}和双变量{ρ
ik
},{μ
ik
}的连续迭代来求解方程(51)。对于j+1次迭代,该算法可以概括为四个步骤:
[0155]
步骤一:更新固定
[0156][0157]
其中,表示惩罚参数,为原始变量,其中其中为简化替代变量、为比例因子;
[0158]
显然,这属于一个多元二次规划问题,求解起来很麻烦,但是我们发现t并没有与
其它变量耦合。因此,可以通过对公式(52)中的变量进行分解和优化,找到抛物线的顶点,得到封闭表达式的解为
[0159][0160]
步骤二:更新固定
[0161][0162][0163][0164]
为了简化理解,引入以下符号:和可以得到公式(54)的等价变换为:
[0165][0166]
此外,此外,介绍符号x=[x
11
,...,x
ik
]
t
,r=[r
11
,...,r
ik
]
t
,,e={e
11
,...,e
ik
},1=[1,...,1]
t
,公式(55)
[0167]
中的优化问题可以用上述符号等价表示:
[0168][0169]
通过现有的数学工具可以有效地解决二次规划(quadratic programming,qp)问题,如cvx软件包或matlab优化工具箱。
[0170]
步骤三:更新固定
[0171][0172]
步骤四:更新
[0173][0174]
τ的值决定惩罚函数是常量还是变量,惩罚参数的初始选择建议使用τ>1来提高收敛性能和减少损失。
[0175]
由于算法的迭代次数较多,必须关注算法的收敛性。算法的时效性对于协同感知非常重要,特别是一些自然灾害检测和危险信息检测场景。在不同参数下,算法的收敛性得到了保证。
[0176]
此外,给出了以下停止条件:在连续迭代中,目标函数的约束波动很小,具体地说,以下条件同时确立。
[0177][0178]
其中ε
obj
和ε
con
是收敛公差,可以是一个更小的常数阈值。
[0179]
表1用于优化传感器报告功率的admm算法
[0180][0181]
[0182]
对计算的全局检测概率进仿真验证的方法为:
[0183]
假设在m个天线融合中心周围分布n=10个传感器,距离di在[2,20]范围内随机分布,为了比较同一环境下多天线传感器和单天线传感器对检测性能的影响,本文选择一组均匀分布的随机距离向量进行后续的仿真。随机距离向量的集合为[17.5024,3.3541,19.4117,6.4284,5.9324,14.0173,8.3763,8.6594,19.7629,11.0626]。所有传感器报告的功率之和为p=400mw,信号方差噪声方差虚警概率暂定为p
fa
=ε=0.05。另外,路径损失指数因子α=2,第i个传感器的测量噪声随机分布在区[0.25,0.5]之间。
[0184]
图3描述了多天线传感器网络中传感器天线数k=1、2、4时,检测器的检测概率pd与虚警概率p
fa
之间的关系。可以看出,当融合中心内天线数量固定时,采用多天线传感器可以提高检测器的检测性能。当传感器的天线数量确定时,在融合中心使用不同的天线也会对检测性能产生影响,即随着天线数量的增加,检测性能会更好,最终达到性能极限如图4所示。
[0185]
在图5中,在多天线传感器网络中传感器的天线数、融合中心天线数和传感器报告总功率对检测性能的影响得到了更清晰的体现。仿真结果表明,采用多天线传感器可以获得较好的检测性能。从仿真结果可以看出,随着fc天线数量的增加,当m达到一定的天线数量(如200-250)时,所提出的解决方案的检测性能非常接近性能上限。随着天线数量的增加,融合中心的信号接收能力会更强,检测时克服传输信道衰落的能力将会大大提高,但当它达到一定水平时,检测性能取决于接收机噪声等其他因素,即m的取值取决于传感器天线的数量和其他变量,如此外,随着融合中心天线数量或发射功率的无限增加,系统的检测性能将达到上限。如果融合中心处天线数量和功率为无穷大,则不需要进行功率优化,但在实际操作中,天线数量不能过大,功率是有限的。因此,考虑优化功率是很重要的。在多天线传感器的使用中,为了获得良好的检测性能,本发明发现了天线数量和报告的总功率p之间的权衡关系。换句话说,可以在有限的功率下使用更多的天线来弥补损失,反之亦然。
[0186]
图6至图8显示了不同天线传感器下admm迭代算法的收敛性能。同时可以看到,算法经过30次迭代后,达到了相对稳定的状态,算法的时效性对协同感知至关重要,而几十次的迭代对于实际使用是可以接受的。对于大型分布式传感器网络,算法的收敛速度越快,检测速度越快。
[0187]
需要说明的是,在本技术中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0188]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1