一种基于无人机蜂群的海上保密通信方法
本发明属于海上物理层保密通信,特别涉及一种基于无人机蜂群的海上保密通信方法。
背景技术:
1、随着海上活动和海洋经济的不断发展,建立一个高速并可靠的海上通信逐渐被人关注。无人机能够作为空中基站以及空中中继来协助海上通信,为海上船只提供可靠且高效的无线通信服务。在无人机作为空中中继/基站的场景中,海上合法船只欲进行通信,然而海上可能存在未知的窃听船只窃取合法信息。虽然采用上层加密的方式可以实现无线网络中的机密通信,但是频繁的加密和解密需要较高的计算能力,这给具有有限硬件资源的海上船只带来了严峻的挑战。此时可以利用无人机蜂群建立连接,之后使用单跳或者多跳的方法向窃听船发送干扰信息,但是这种方法会带来额外的能量消耗,对传输功率有限的无人机来说无疑带来了很大挑战。此外,窃听船只的位置离无人机蜂群较远,传统模式下无人机蜂群不能直接发送干扰信号,需要移动到窃听船只附近,这样也会消耗额外的能耗。
技术实现思路
1、本发明的主要目的是提供一种基于无人机蜂群的海上保密通信方法,能够确定虚拟天线阵列中无人机的最佳位置以及最佳激励电流权重,在保证海上船只安全通信的前提下,减少无人机蜂群移动能量消耗。
2、本发明还有一个目的是通过改进的蝗虫优化算法确定无人机的最佳位置以及最佳激励电流权重,能够获得更好的优化效果,进一步高海上通信的安全性,并且进一步减少无人机蜂群移动能量消耗。
3、本发明提供的技术方案为:
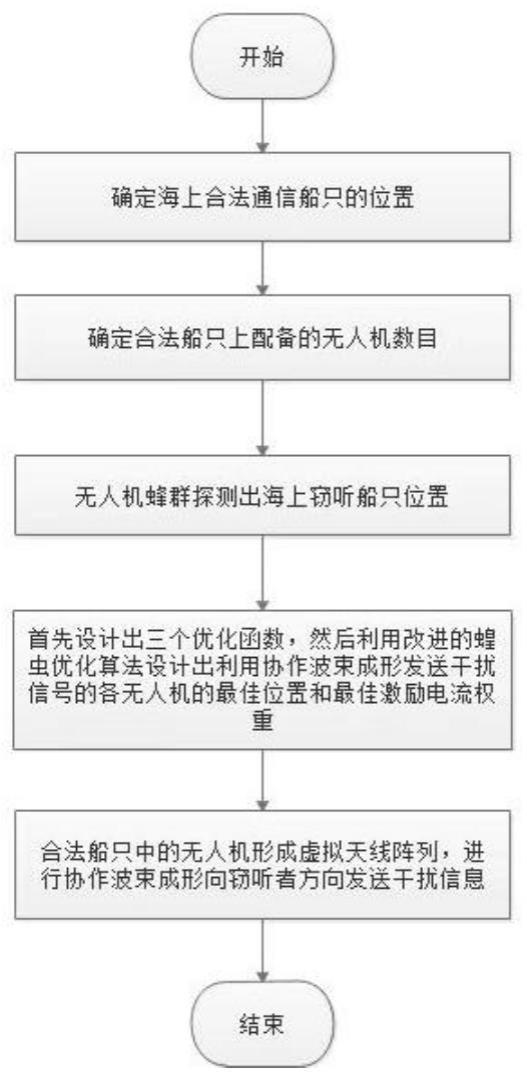
4、一种基于无人机蜂群的海上保密通信方法,包括如下步骤:
5、步骤一、获取海上合法通信的两个船只的位置和海上窃听船只的位置,以及确定能够执行通信任务的无人机数量;
6、其中,所述能够执行通信任务的无人机组成虚拟天线阵列;
7、步骤二、确定三个目标函数,以第一目标函数最大,第二目标函数最小以及第三目标函数最小作为优化目标,确定虚拟天线阵列中各无人机的最佳位置和最佳激励电流权重;
8、其中,所述第一目标函数为:无人机天线阵列通信的海上合法接收信号的船只的信号与干扰加噪声比;
9、所述第二目标函数为:无人机天线阵列通信的海上窃听船只的信号与干扰加噪声比;
10、所述第三目标函数为:在飞行过程中无人机能量消耗;
11、步骤三、虚拟天线阵列中的无人机移动到最佳位置后,按照最佳激励电流权重,向所述海上窃听船只发送干扰信号,实现海上保密通信。
12、优选的是,所述第一目标函数的表达式为:
13、
14、其中,表示虚拟天线阵列中无人机的三维位置坐标,表示无人机的激励电流权重;pa表示合法发送信号船只的信号传输功率;βa2b表示海上合法通信的两个船只之间的路径损耗系数;ptu表示虚拟天线阵列的总传输功率;gb表示无人机天线阵列向合法接收信号的船只的天线增益;βu2b表示无人机天线阵列与合法接收信号的船只的路径损耗系数;σ2表示噪声功率。
15、优选的是,所述海上合法通信的两个船只之间的路径损耗系数为:
16、
17、其中,hs为海平面高度,da2b为海上合法通信的两个船只之间的距离,cu为环境相关的常量。
18、优选的是,无人机天线阵列与合法接收信号的船只的路径损耗系数为:
19、
20、其中,ηlos为视距链路的衰减因子,ηnlos为非视距链路的衰减因子,αa和αb表示海上环境中sigmoid函数的参数;fc表示无人机的载波频率;du2b表示无人机虚拟天线阵列中心与合法接收信号的船只的距离,hu为无人机虚拟天线阵列中心的高度。
21、优选的是,所述第二目标函数的表达式为:
22、
23、其中,表示虚拟天线阵列中无人机的三维位置坐标,表示无人机的激励电流权重;pa表示合法发送信号船只的传输功率;βa2e表示合法发送信号船只和窃听船只之间的路径损耗系数;ptu表示虚拟天线阵列的总传输功率;ge表示无人机天线阵列向窃听船只方向的天线增益;βu2e表示无人机天线阵列与窃听船只的路径损耗系数;σ2表示噪声功率。
24、优选的是,所述第三目标函数的表达式为:
25、
26、其中,表示虚拟天线阵列中无人机的三维位置坐标,ei表示虚拟天线阵列中第i架无人机通信时的能量消耗,nu表示虚拟天线阵列中的无人机数量;
27、虚拟天线阵列中无人机通信时的能量消耗的计算公式为:
28、
29、
30、式中,t表示无人机的总飞行时间,v(t)表示无人机在时刻t的速度,mu表示无人机的重量,g表示重力加速度,h(t)表示飞行结束时无人机的高度,h(0)表示初始时无人机的高度;p(v)表示无人机在二维水平空间飞行时的推动能量消耗,pb和pi是两个常数,分别表示悬停状态下的叶片轮廓和诱导功率,v表示无人机的速度,vtip表示旋翼叶片的叶尖速度,vm表示在悬停状态下的平均旋翼叶片诱导速度,d0表示机身阻力比,ρa表示空气密度,sr表示旋翼叶片坚硬度,ar表示旋翼圆盘面积。
31、优选的是,在所述步骤二中,基于改进的蝗虫优化算法确定虚拟天线阵列中各无人机的最佳位置和最佳激励电流权重,包括如下步骤:
32、步骤1、利用logistic映射进行混沌初始化,初始化所有无人机位置和激励电流权重,将初始化的无人机竖直位置、水平位置和激励电流权重的组合作为初始化解,并存储为第一解集;
33、步骤2、计算所述第一解集中的解对应的第一目标函数和第二目标函数,得到多个非支配解,作为第二解集;并且采用轮盘算法从所述第二解集中选出一个解作为当前最优解;
34、步骤3、使用蝗虫优化算法对所述第一解集进行优化;
35、步骤4、利用所述当前最优解对步骤3中优化后的第一解集中每个解对应的无人机竖直位置进行优化调整;并且使用所述优化调整的结果对所述第一解集进行更新;
36、循环执行步骤2至步骤4,直到达到设定的迭代次数;
37、其中,最后一次迭代得到的当前最优解即为全局最优解,所述全局最优解对应的无人机位置和激励电流权重即为无人机的最佳位置和最佳激励电流权重。
38、优选的是,在所述步骤4中,通过如下公式对无人机竖直位置进行优化调整:
39、
40、其中,为当前最优解对应无人机的竖直位置,为当前第i组无人机的竖直位置,为更新后的第i组无人机的竖直位置;p为判断随机数,e表示指数函数的底,m2表示随机最优竖直位置优化参数,m2′表示最优竖直位置优化参数,rand为参数随机数,t表示当前迭代次数,tmax表示最大迭代次数。
41、优选的是,在所述步骤4中,还包括:
42、如果当前迭代次数小于最大迭代次数的一半且参数随机数小于参数值,通过如下公式对无人机水平位置进行优化调整:
43、
44、其中,为当前第i组无人机的水平位置,为当前无人机的平均水平位置,为更新后的第i组无人机的水平位置;m1表示随机平均水平位置优化参数,m1′表示平均水平位置优化参数。
45、优选的是,在所述步骤4中,还包括:
46、如果当前迭代次数大于或等于最大迭代次数的一半且参数随机数小于参数值,通过如下公式对无人机激励电流权重进行优化调整:
47、
48、其中,为当前第i组无人机的激励电流,为当前最优解对应的无人机激励电流权重,为更新后的第i组无人机的激励电流;m3表示随机最优激励电流优化参数,m3′表示最优激励电流优化参数。
49、本发明的有益效果是:
50、本发明提供的基于无人机蜂群的海上保密通信方法,能够确定虚拟天线阵列中无人机的最佳位置以及最佳激励电流权重,在保证海上船只安全通信的前提下,减少无人机蜂群移动能量消耗。
51、本发明通过改进的蝗虫优化算法确定无人机的最佳位置以及最佳激励电流权重,能够提高解的优化效果,进一步高海上通信的安全性,并且进一步减少无人机蜂群移动能量消耗。
- 还没有人留言评论。精彩留言会获得点赞!