一种人机耦合式呼叫中流量控制方法、系统及存储介质与流程
1.本发明涉及一种人机耦合式呼叫中流量控制方法,属于人工智能、智能外呼领域。
背景技术:
2.人机耦合是指先由ai机器人按一定的并发量自动发起大量的呼叫,由ai机器人先和用户通话,当符合一定条件的时候将通话转接到人工坐席,由人工代替ai机器人继续和用户通话。cn113572903a公开了一种呼叫中心人机耦合协同方法,根据所述语音内容判断是否达到切换条件,如果是,则将智能坐席切换到人工坐席。上述公开的技术方案及其它现有技术中,在人机耦合式智能外呼呼叫中并无动态流量控制功能,在开展人机协同智能外呼过程中会存在几个实际问题,第一,如果ai机器人引擎及呼叫的并发量过大,导致需要转接到人工的通话数过多,人工客服承接不过来引发大量排队积压,导致超过部分无法转接产生呼损,造成用户感知差流失高意向用户或产生投诉等问题;第二,如果ai机器人引擎及呼叫的并发量过小,导致需要转接到人工的通话数过少,将导致人工坐席工作不饱和,浪费人力资源,不能有效发挥人工客服的作用,造成平台引擎资源利用率低,ai机器人和人工客服的流量衔接无法保障。
技术实现要素:
3.本发明所要解决的技术问题:如何实现对人机耦合式智能外呼流量的控制。
4.本发明采用的技术方案:
5.一种人机耦合式呼叫中流量控制方法,包括以下步骤:
6.1)预置人机耦合式智能外呼系统参数配置;
7.2)启动基于深度学习的动态流量控制预测算法,完成机耦合式呼叫中流量控制,具体步骤如下:
8.21)配置初始呼叫并发数;
9.22)获取ai机器人外呼端接通数据;
10.23)获取人工座席端接待数据;
11.24)利用深度学习算法预测ai机器人外呼并发量;
12.25)动态调节并发数开展人机协同外呼;
13.26)ai机器人外呼并发动态调节算法服务器进行迭代训练自动调控。
14.一种人机耦合式呼叫中流量控制系统,包括以下功能模块:
15.参数配置模块:预置人机耦合式智能外呼系统参数配置;
16.预测算法模块:启动基于深度学习的动态流量控制预测算法,完成机耦合式呼叫中流量控制,具体步骤如下:
17.21)配置初始呼叫并发数;
18.22)获取ai机器人外呼端接通数据;
19.23)获取人工座席端接待数据;
20.24)利用深度学习算法预测ai机器人外呼并发量;
21.25)动态调节并发数开展人机协同外呼;
22.26)ai机器人外呼并发动态调节算法服务器进行迭代训练自动调控。
23.一种计算机可读存储介质,用于存储上述方法及系统。
24.本发明所达到的有益效果:本发明提供的一种基于深度学习的流量控制预测算法,监控预测智能外呼接通情况,监控并预测人工座席接待资源,通过流量控制预测算法预测ai机器人外呼并发量,实现动态调整外呼流量并发,使得智能外呼转人工数无限接近空闲人工座席数量,保障ai机器人和人工客服的流量衔接,既避免了转人工处理量过多,人工客服承接不过来引发排队积压,造成用户感知差流失高意向用户或产生投诉等问题,又避免了转人工量太少,造成人工客服工作量不饱和,不能有效发挥人工客服的作用。同时,本发明的方法可实现人机耦合式智能外呼呼叫过程中系统的自动并发流量动态控制,可以根据人工座席情况及业务呼叫情况动态调控引擎并发,减少呼损发生,提高引擎及人员效能,在ai机器人服务和人工服务之间取得平衡,为用户更好把握高意向用户,开展精准营销,提高人机交互体验度,减少投诉风险。
附图说明
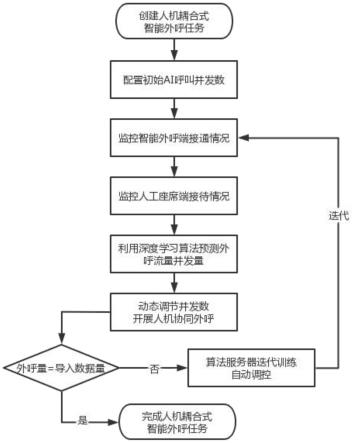
25.图1是基于深度学习的动态流量控制预测算法流程图;
26.图2基于深度学习的bp神经网络预测外呼流量并发量示意图。
具体实施方式
27.以下结合附图和具体实施例对本发明的技术方案作进一步说明。
28.实施例1
29.如图1所示,本发明的一种人机耦合式呼叫中流量控制方法,包括以下步骤:
30.1)预置人机耦合式智能外呼系统参数配置,包括:
31.人机配比参数a:用于调节ai机器人并发量,默认值为1.5;
32.查询周期t:用于查询座席数量并重新计算调节参数的周期,默认值为60秒;
33.ai机器人最大并发量m:能提供的ai机器人识别最大并发量;
34.ai机器人外呼并发量n:ai机器人发起外呼的实时并发量,包括正在外呼和通话中的并发;
35.空闲人工座席数量k:实时监测当前在线人工座席状态为空闲的人工坐席数量,空闲是指可以随时接听电话;
36.ai机器人平均通话时长tr(秒):实时记录智能外呼通话交互时长时长;
37.人工座席接续平均通话时长t
p
(秒):按照智能外呼任务维度记录并统计人机耦合式智能外呼转人工接续后的人工通话时长。
38.2)启动基于深度学习的动态流量控制预测算法,具体步骤如下:
39.21)配置初始呼叫并发数:
40.创建智能外呼任务,导入外呼数据集d,启动时按照智能外呼任务预设日期、时间段、转接技能组等参数向人机耦合式智能外呼系统中的预测算法模块发起智能外呼呼叫请求,人机耦合式智能外呼系统接收请求后,向监控服务器请求获取当前在线空闲人工座席
数量k,及外呼模型预置的最大ai机器人并发量m,记录当前时间t1,依据当前最小可转接人机配比数,预置系统初始ai机器人外呼并发数n,发起智能外呼,公式如下:
[0041][0042]
roundup(.)函数表示向上舍入数字。
[0043]
22)获取ai机器人外呼端接通数据:
[0044]
经过查询周期t后记录当下时间为t2,监控服务器向智能外呼端请求抓取实时ai机器人外呼接听数据,向系统提取实时智能外呼ai机器人总呼叫量rs
call-out
、总接通量rs
call-on
、ai机器人平均通话时长tr、ai机器人转人工请求总量rs
p
,并测算实时特征值,包括:ai机器人接通率r
ai
、ai机器人转人工请求率r
p
、人机配比参数a,
[0045]
ai机器人接通率:
[0046]
ai机器人转人工请求率:
[0047]
人机配比参数:
[0048]
23)获取人工座席端接待数据:
[0049]
当时间为t2时,监控服务器同步向人工坐席端请求抓取ai机器人转人工电话接续数据,提取系统实时人工接续服务总量sa、在线空闲人工座席数量k、人工座席接续平均通话时长t
p
,并计算ai机器人成功转人工接续率rs作为特征值,
[0050]
ai机器人成功转人工接续率:
[0051]
24)利用深度学习算法预测ai机器人外呼并发量:
[0052]
基于深度学习的三层bp神经网络算法,将ai机器人接通率r
ai
、ai机器人转人工请求率r
p
、人机配比参数a、ai机器人平均通话时长tr、人工座席接续平均通话时长t
p
、在线空闲人工座席数k、ai机器人成功转人工接续率rs作为输入层特征向量神经元个数,并将ai机器人外呼并发量n作为输出层;
[0053]
根据bp神经网络算法还需要设置一个隐藏层的神经网络,根据如下经验公式选取隐藏层个数,其中n为输入层神经元个数,m为输出层神经元个数,α为[1,10]之间的常数,
[0054][0055]
根据上式可以计算出神经元个数为4-13个之间,本发明优先选取l=6作为隐藏层神经元个数;
[0056]
并对bp神经网络选取s型正切传递函数通过样本数据的迭代训练,不断修正网络权值和阈值,使误差函数沿负梯度方向下降,逼近期望输出,获取t2时刻系统预测ai机器人呼叫并发数o,ni为期望输出,oi为神经网络计算输出,i为每
个层单元;
[0057]
25)动态调节并发数开展人机协同外呼:
[0058]
将步骤24)预测t2时刻的ai机器人呼叫并发数o赋值给实际ai机器人外呼并发量n,以此动态调节系统ai机器人呼叫流量,使人机交互达到平衡状态。
[0059]
26)ai机器人外呼并发动态调节算法服务器进行迭代训练自动调控:
[0060]
将在预置采集的每个查询周期t时刻,监控服务器采集相应特征数据,包括ai机器人接通率r
ai
、ai机器人转人工请求率r
p
、人机配比参数a、ai机器人平均通话时长tr、人工座席接续平均通话时长t
p
、在线空闲人工座席数k、ai机器人成功转人工接续率rs等,ai机器人外呼并发动态调节算法服务器启动步骤24)预测外呼流量并发算法,预测查询周期t下的系统ai机器人外呼并发量n,直到总外呼量rs
call-out
等于导入的外呼数据集d数量后结束,完成人机耦合智能外呼工作。
[0061]
在步骤26)中,基于神经网络算法进行预测,得到ai机器人呼叫并发量预测值;
[0062]
当ai机器人呼叫并发量预测值小于当下ai机器人呼叫并发量,判定人机耦合接续处于饱和状态,实时转人工处于积压排队状态,存在用户呼叫流失风险,需要降低实际呼叫并发量;
[0063]
当ai机器人呼叫并发量预测值大于当下ai机器人呼叫并发量,判定人机耦合接续处于空闲状态,人工座席长时间等待电话承接,存在引擎资源浪费、人员效能低下的风险,需要增加实际呼叫并发量;
[0064]
当ai机器人呼叫并发量预测值等于当下ai机器人呼叫并发量,判定ai机器人服务和人工服务处于平衡状态,实现服务体验和生产效能最大化。
[0065]
一种人机耦合式呼叫中流量控制系统,包括以下功能模块:
[0066]
参数配置模块:预置人机耦合式智能外呼系统参数配置;
[0067]
预测算法模块:启动基于深度学习的动态流量控制预测算法,完成机耦合式呼叫中流量控制,具体步骤如下:
[0068]
21)配置初始呼叫并发数;
[0069]
22)获取ai机器人外呼端接通数据;
[0070]
23)获取人工座席端接待数据;
[0071]
24)利用深度学习算法预测ai机器人外呼并发量;
[0072]
25)动态调节并发数开展人机协同外呼;
[0073]
26)ai机器人外呼并发动态调节算法服务器进行迭代训练自动调控。
[0074]
一种计算机可读存储介质,用于存储上述方法及系统。
[0075]
实施例2
[0076]
一种人机耦合式呼叫中流量控制方法,包括以下步骤:
[0077]
1)预置人机耦合式智能外呼系统参数配置;
[0078]
2)启动基于深度学习的动态流量控制预测算法,完成机耦合式呼叫中流量控制,具体步骤如下:
[0079]
21)配置初始呼叫并发数;
[0080]
22)获取ai机器人外呼端接通数据;
[0081]
23)获取人工座席端接待数据;
[0082]
24)利用深度学习算法预测ai机器人外呼并发量;
[0083]
25)动态调节并发数开展人机协同外呼;
[0084]
26)ai机器人外呼并发动态调节算法服务器进行迭代训练自动调控。
[0085]
在步骤24)中,利用深度学习算法预测ai机器人外呼并发量:
[0086]
基于深度学习的三层bp神经网络算法,将ai机器人接通率r
ai
、ai机器人转人工请求率r
p
、人机配比参数a、ai机器人平均通话时长tr、人工座席接续平均通话时长t
p
、在线空闲人工座席数k、ai机器人成功转人工接续率rs作为输入层特征向量神经元个数,并将ai机器人外呼并发量n作为输出层;
[0087]
根据bp神经网络算法还需要设置一个隐藏层的神经网络,根据如下经验公式选取隐藏层个数,其中n为输入层神经元个数,m为输出层神经元个数,α为[1,10]之间的常数,
[0088][0089]
根据上式可以计算出神经元个数为4-13个之间,根据隐藏神经元个数确定原则,隐藏神经元个数应为输入层大小的2/3加上输出层大小的2/3,故而本发明分别选取l=5和l=6作为隐藏层神经元个数,选取试验结果中准确度最高的l取值作为隐藏层神经元个数。
[0090]
其它技术特征与实施例1相同。
[0091]
本发明的方法基于深度学习的动态流量控制预测算法,监控预测智能外呼接通情况,监控并预测人工座席接待资源,基于深度学习的bp神经网络预测智能外呼动态流量并发,提高引擎利用率和人员工作效能,减少呼损,在ai机器人服务和人工服务之间取得了一个很好的平衡,为用户更好把握高意向用户开展精准营销,提高人机交互体验度,减少投诉风险。
[0092]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0093]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0094]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0095]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0096]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1