一种光电吊舱长焦镜头对焦矫正的方法、装置及设备与流程
本发明涉及自动对焦,尤其涉及一种光电吊舱长焦镜头对焦矫正的方法、装置及设备。
背景技术:
1、长焦镜头自动或手动对焦方法大部分是通过获取图像信息来控制镜头电机进行全域或区域搜索至最大清晰点位置。每一次的搜索过程都需大量的算法判断,先进行大体模糊搜索到图像清晰点前后位置,再来回控制电机进行精细搜索以达到最大清晰点。这样操作最大的缺点是模糊图像占对焦的绝大部分时间,且对焦期间耗时长,操作烦琐,不能准确的对一步到位。
2、为此,公开号为cn109660716b的中国发明专利公开了一种基于自动测距的长焦镜头及实现自动对焦方法与装置,说明书第[0004]~[0014]记载“基于自动测距的长焦镜头实现自动对焦方法,包括下列步骤:
3、通过测试物体距离实验获得距离值和电机的对焦清晰位置的理论值;形成矩阵式数据列表成并生成目标代码;开机自检,多次采样,计算出偏移量值;根据物距改变,在理论值信息程序内进行查表;基于对对焦位置的实际值与理论值比较,来确定偏移量值的是正方向还是反方向。
4、进一步,所述通过测试物体距离实验获得距离值和电机的对焦清晰位置的理论值,包括下列步骤:
5、利用激光测距模块测量所述激光测距模块与标定环境之间的标定距离;镜头利用电机参照所述标定距离对所述标定环境进行对焦,直至将图像对焦清晰,并得到一对焦距离;所述镜头通过串口通讯实时控制读取所述标定距离的变化值,并假定所述标定距离的变化值为距离阈值,所述距离阈值为自定义数值;所述标定距离根据所述距离阈值发生变化,则手动改变所述电机的对焦距离,直至将图像对焦清晰,并记录所述标定距离和所述对焦距离的理论值。”
6、其通过测试物体距离实验获得距离值和电机的对焦清晰位置的理论值生成矩阵式数据列表成并生成目标代码,开机自检根据物距改变,在理论值信息程序内进行查表,然后根据获得的对焦位置的实际值进行比较,确定偏移量值的补偿,达到快速对焦的效果。
7、上述专利文献解决了手动对焦时模糊图像占对焦的绝大部分时间,且对焦期间耗时长,操作烦琐,不能准确的对一步到位的问题。
8、调焦不仅存在于静态场景下,还包括动态场景,现阶段无人机应用日益增多,无人机多光电子吊舱在安防边检、工业巡检、军事侦察等领域广泛应用。多光吊舱内激光雷达可配合长焦镜头在光照环境差、图像画面高频分量低或相位差置信度等级低的时候辅助对焦,但长焦镜头存在由于生产工艺、镜头偏差、以及工厂流水线人力组装过程中产生的不可控问题,在大倍数每个镜头个人间的偏差可能达到上百步电机步,这将导致吊舱长焦镜头对焦区域超出马达运动范围,而无法对清目标。
9、为了解决这种情况,通常会直接按照相机对焦表格进行辅助对焦或者再对不清时候切换成手动模式手动调整焦距,但这种方式并不是很适合用于高倍数高精度要求下的政务、军事、巡检等动态场景,在这类场景下,更希望能自动快速聚焦清晰而非人力辅助,且由于流水线生产的螺丝拧动力矩不同甚至会导致正确步数在对焦表格步数范围之外导致对焦无法清晰。
10、鉴于此,需要一种适合动态场景下的一种光电吊舱长焦镜头对焦矫正的方法解决此问题。
技术实现思路
1、本发明的目的在于提供一种光电吊舱长焦镜头对焦矫正的方法、装置及设备,以解决在动态场景下,因光照差、相位差或无法得到准确图像高频分量导致对焦不清晰的技术问题。
2、为实现上述目的,本发明的一种光电吊舱长焦镜头对焦矫正的方法、装置及设备的具体技术方案如下:
3、作为本发明的第一个方面,提供了一种光电吊舱长焦镜头对焦矫正的方法,包括:
4、步骤s1,对吊舱的对焦器件进行初始化校准,生成与参考表偏差值,步骤s1包括:
5、步骤s111,激光雷达校准,将激光雷达分别对准不同距离的目标,将校准时的距离值写入设备完成校准;
6、步骤s112,对图像传感器的相位进行校准,驱动长焦电机在不同倍数下全程运行,分析不同电机步数下的图像高频分量,在高频分量量化值最高的步数记录当前pd值,定义pd值为a,则对应变倍倍数的pd校准数值为0-a;
7、步骤s12,基于步骤s111和步骤s112的结果,进行长焦镜头电机校准:将长焦电机置于激光雷达测距预定距离d处,在不同倍数下对准对焦图纸,在当前倍数下马达全行程内步进从近焦到远焦进行马达运动,记录图像传感器在每个电机步数时的相位差pd值,当pd为pd校准数值时,记录当前步数b,与供应商提供的对焦表格预定距离d处的步数c做差计算,则每个对应步数下电机校准步数为b-c;
8、步骤s13,在光学实验室内,采用光源在1500-10000照度的环境下,用加上校准步数后的长焦镜头在不同倍数和距离下抓取raw图,使用图像分析软件进行图像分析;
9、步骤14,判断由步骤s13所得的数据的图像质量参数是否合格,若是则进入步骤s15,若否则进入步骤s142;
10、步骤s142,判断校准失败次数是否超过预定次数,若否则跳转至步骤s1,若是则判定为不合格器件;
11、步骤s15,完成无人机光电吊舱载荷的组装,组装过程中保持长焦相机和雷达平行。
12、进一步地,步骤s1之后包括:
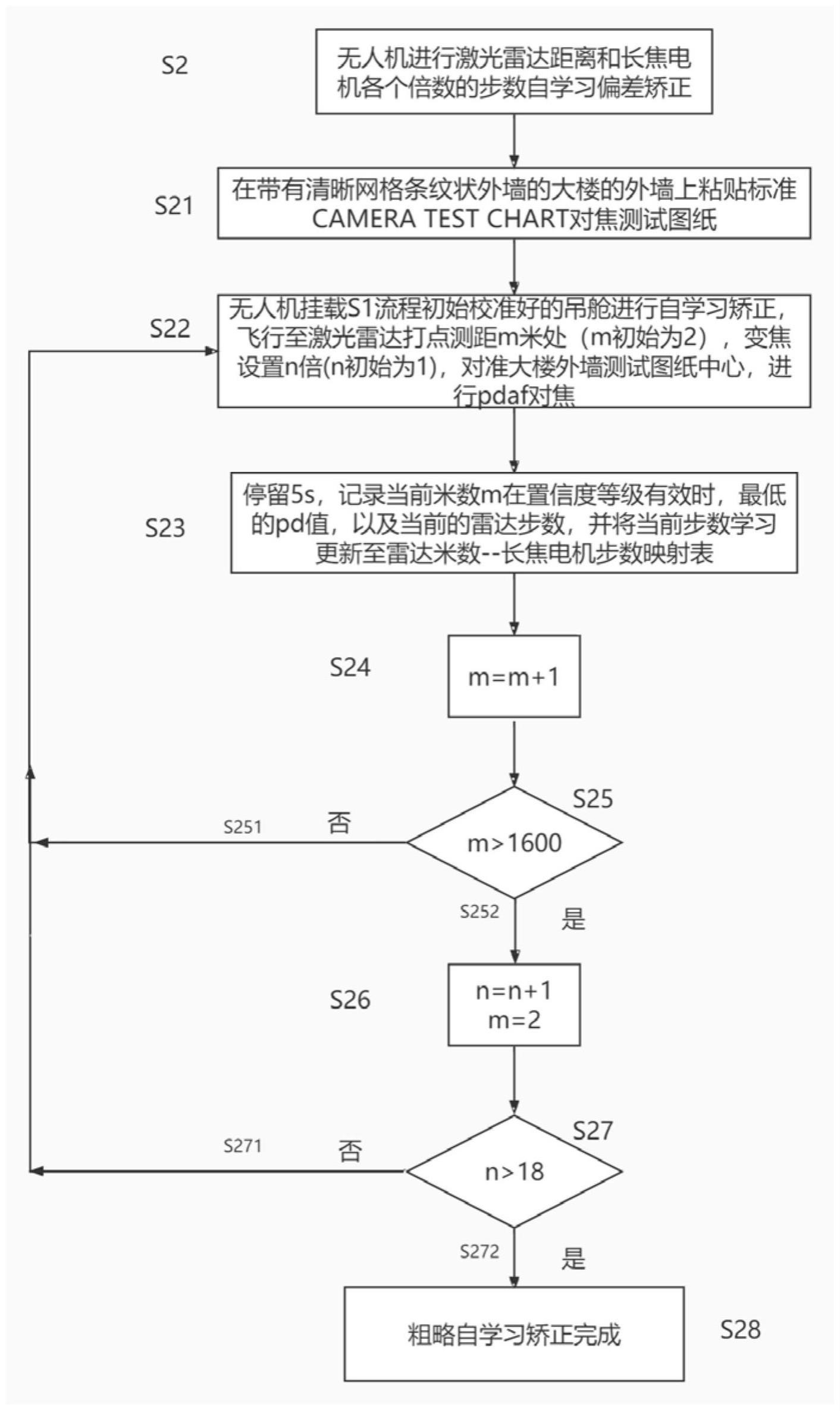
13、步骤s2,无人机进行激光雷达距离和长焦电机各个倍数下的马达步数映射自学习偏差矫正;
14、步骤s3,前后景等特珠场景或吊舱摔落、结果挤压损坏导致的光轴平行,使得雷达距离和电机步数映射表不在适合实际对焦场景,需进行自学习矫正。
15、进一步的,步骤s2包括:
16、步骤s21,在带有清晰网格条纹状外墙的大楼的外墙粘贴标准对焦测试图纸;
17、步骤s22,无人机挂载s1流程初始化校准好的吊舱进行自学习矫正,将无人机飞行至激光雷达打点测距m米处,变焦设置n倍,其中n≥1,对准标准对焦测试图纸的中心,进行pdaf自动对焦;
18、步骤s23,无人机悬停3至8秒,记录当前米数m在置信度等级有效的前提下最低的pd值,以及当前米数的雷达步数,并将当前步数学习更新至雷达米数和长焦电机步数映射表;
19、步骤s24,m=m+1;
20、步骤s25,判读米数m是否超出雷达的最大范围,若否则返回步骤s22进行下一米数的最清晰位置步数获取,若是则进入步骤s26;
21、步骤s26,将倍数计数n+1,米数计数设置为m=2;
22、步骤s27,判断当前倍数是否已经超出电机最大对焦倍数的18倍,如果否则跳转至步骤s22,将电机变倍,无人机飞到2米处重新开始寻找最清晰点位;若是则进入步骤s28;
23、步骤s28,完成第一阶段自学习矫正流程。
24、进一步的,步骤s3包括:
25、步骤s31,选择步骤s2中的映射表格,根据实际场景环境设置相位差和置信度等级阈值;
26、步骤32,无人机挂载吊舱在实际应用场景中飞行,从n部和m米的雷达距离开始,记录当前相位差等级和当前置信度等级;
27、步骤s33,判断当前飞行位置的相位差和置信度等级是否大于步骤s32设定的阈值,若是则进入步骤s331,若否则进入步骤s34;
28、步骤s331,更新当前雷达距离和长焦电机步数n倍m下的映射;
29、步骤s34,更新米数m=m+1;
30、步骤s35,判断当前米数是否大于雷达最大测量距离1600米,若是则进入步骤s352,若否则返回步骤s32进行下一米数的最清晰点位测量;
31、步骤s352,更新倍数n=n+1,重置米数m=2;
32、步骤s36,判断当前倍数是否大于18,若是则进入步骤s37,若否则返回步骤s32进行下一倍数的清晰点位校准。
33、优选地,在步骤s12中,预定距离d为2米。
34、优选地,在步骤s142中,预定次数为三次。
35、优选地,在步骤s23,无人机悬停5秒。
36、作为本发明的第二个方面,提供了一种光电吊舱长焦镜头对焦矫正的装置,包括生成模块,用于对吊舱的对焦器件进行初始化校准,生成与参考表偏差值,生成模块包括:
37、第一校准模块,用于激光雷达校准,将激光雷达分别对准不同距离的目标,将校准时的距离值写入设备完成校准;
38、第二校准模块,用于对图像传感器的相位进行校准,驱动长焦电机在不同倍数下全程运行,分析不同电机步数下的图像高频分量,在高频分量量化值最高的步数记录当前pd值,定义pd值为a,则对应变倍倍数的pd校准数值为0-a;
39、处理模块,用于基于第一校准模块和第二模块的结果,进行长焦镜头电机校准:将长焦电机置于激光雷达测距预定距离d处,在不同倍数下对准对焦图纸,在当前倍数下马达全行程内步进从近焦到远焦进行马达运动,记录图像传感器在每个电机步数时的相位差pd值,当pd为pd校准数值时,记录当前步数b,与供应商提供的对焦表格预定距离d处的步数c做差计算,则每个对应步数下电机校准步数为b-c;
40、图像分析模块,用于在光学实验室内,采用光源在1500-10000照度的环境下,用加上校准步数后的长焦镜头在不同倍数和距离下抓取raw图,使用图像分析软件进行图像分析;
41、第一判读模块,用于判断由步骤s13所得的数据的图像质量参数是否合格,若是则进入步骤s15,若否则进入步骤s142;
42、第二判读模块,用于判断校准失败次数是否超过预定次数,若否则跳转至步骤s1,若是则判定为不合格器件。
43、进一步地,在生成模块之后还包括:
44、第一矫正模块,用于无人机进行激光雷达距离和长焦电机各个倍数下的马达步数映射自学习偏差矫正;
45、第二矫正模块,用于前后景等特珠场景或吊舱摔落、结果挤压损坏导致的光轴平行,使得雷达距离和电机步数映射表不在适合实际对焦场景,需进行自学习矫正。
46、作为本发明的第三个方面,提供了一种光电吊舱长焦镜头对焦矫正的设备,包括处理器和存储有计算机程序的存储器,在处理器运行计算机程序时,实现上述任一项的方法。
47、本发明提供的一种光电吊舱长焦镜头对焦矫正的方法、装置及设备具有以下优点:
48、本发明提供一种光电吊舱长焦镜头对焦矫正的方法,通过该方法,在动态场景下,能够在光照差、相位差或无法得到准确图像高频分量的情况下,用雷达进行准确快速的清晰对焦,不因存在各类误差导致雷达对焦不够清晰。
49、在动态环境下使用光电吊舱进行自动对焦时,在光照环境差、无法获得可靠的图片高频分量或相位差进行对焦判断的前提下,用校正后的雷达-长焦电机的映射关系表能快速准确的达到对焦清晰的效果,且能在具体实际环境中,通过自学习或手动修正的方法应对雷达距离和电机步数不一致等特殊场景的问题,也能使得摔落、挤压导致无法使用的光电吊舱重新校准修改电机和雷达的映射进行使用。
- 还没有人留言评论。精彩留言会获得点赞!