一种低杂散的光调制器偏置控制装置及方法与流程
1.本发明涉及微波光子和光通信技术领域,更具体涉及一种低杂散的光调制器偏置控制装置及方法。
背景技术:
2.光调制器具有调制带宽大、调制效率高、频率啁啾小等优点,广泛应用于光纤通信、光载射频(rof)和光纤有线电视等光纤传输系统中。光调制器的调制特性是非线性的,对光调制器加载不同的偏置电压,就可以实现不同工作点(包括最大点、线性点、最小点)的调制工作方式。但由于环境温度、振动以及应力变化等因素,调制器的偏置工作点会发生偏移,导致调制信号质量变差或传输系统误码率上升。
3.为了使光调制器稳定工作,需要采用调制器偏置控制装置对偏置电压进行修正。一种较为稳定、可靠的偏置控制方法是导频法[冯振华,“linbo3马赫-曾德尔调制器任意偏置工作点锁定技术的研究”.光学学报.32(12):73-78(2012)]。导频法的工作原理是,在调制器的直流偏置电压上叠加一个特定频率的低频扰动信号,调制器的输出端连接一个低速光探测器,检测光探测器输出扰动信号的基波和二次谐波的幅度,通过基波和二次谐波的幅度比值来判断调制器的工作点状态,并将该幅度比值作为反馈参数以实现偏置电压的自动控制。
[0004]
导频法具有稳定性好和控制精度高的优点,但是导频法也存在缺陷,即扰动信号会调制到有用的工作信号上,成为系统的杂散干扰信号,会干扰和劣化工作信号,导频扰动信号的幅度越强,对系统的影响也就越大。由于光传输链路的激光器、光纤和光探测器均产生一定的噪声,且导频偏置控制装置自身也有电路噪声,这些噪声共同构成了系统的噪声。在信号检测单元中扰动信号的基波和二次谐波的幅度必须高于检测系统的噪声,才能正确地检测基波和二次谐波的幅度。因此导频信号的幅度不能无限小,导频干扰无法避免。在高灵敏度通信和雷达系统中,由导频信号带来的杂散不可忽视,甚至成为了这些系统的制约因素。
[0005]
中国专利申请公开号cn110166141a,公开的一种光调制器偏置电压的协商控制装置及方法中,提出了在系统空闲时采用导频进行修正的方法避免导频杂散。该方法有两个局限性。一方面,有些系统没有空闲时间用于接收导频信号,即一旦加载导频信号系统必定会受到干扰;另一方面,在偏置电压保持工作模式时无法有效地应对外界的振动或干扰。
技术实现要素:
[0006]
本发明所要解决的技术问题在于现有技术光调制器偏置控制装置无法解决由导频引起的杂散干扰,从而无法使光调制器稳定工作的问题。
[0007]
本发明通过以下技术手段解决上述技术问题:一种低杂散的光调制器偏置控制装置,包括激光器(1)、光调制器(2)、光耦合器(3)和偏压控制电路(4),偏压控制电路(4)包括光探测器(40)、巴伦(41)、差分检测模块(42),光调制器(2)的输入端与激光器(1)的输出端
相连,光调制器(2)的输出端与光耦合器(3)的输入端相连,光耦合器(3)的第一输出端与光探测器(40)的输入端相连,光探测器(40)的输出端与巴伦(41)的输入端相连,巴伦(41)的两个输出端分别与差分检测模块(42)的两个输入端相连,差分检测模块(42)的输出端与控制单元(43)的输入端相连,控制单元(43)的输出端与偏压信号产生单元(44)的输入端相连,偏压信号产生单元(44)的输出端与光调制器(2)的偏压控制信号输入端相连,输出偏压控制信号;所述巴伦(41)用以将输入信号转换为两路输出信号,这两路信号的幅度相等、相位相反;所述差分检测模块(42)对巴伦(41)输出的两路信号进行相减处理。
[0008]
有益效果:本发明通过巴伦(41)将输入信号转换为两路输出信号,这两路信号的幅度相等、相位相反;差分检测模块(42)对巴伦(41)输出的两路信号进行相减处理,由于相位相反,因此减法运算后信号幅度得到加倍,而信号上叠加的共模噪声被抵消,提高了误差信号的检测信噪比,解决由导频引起的杂散干扰,使光调制器稳定工作。
[0009]
进一步地,所述差分检测模块(42)包括运算放大器(421)以及数字采集单元(422),巴伦(41)的两个输出端分别与运算放大器(421)的同相输入端及反相输入端连接,运算放大器(421)的输出端与数字采集单元(422)的输入端相连。
[0010]
更进一步地,所述运算放大器(421)对巴伦(41)输出的两路反相信号进行模拟减法运算,差分输出信号的幅度加倍,且电路噪声被部分抵消,数字采集单元(422)将巴伦(41)输出的模拟信号转变为数字信号输出。
[0011]
进一步地,所述差分检测模块(42)包括第一数字采集器(423)、第二数字采集器(424)以及数字差分运算器(425),巴伦(41)的两个输出端分别与第一数字采集器(423)以及第二数字采集器(424)的输入端连接,第一数字采集器(423)的输出端与数字差分运算器(425)的第一输入端相连,第二数字采集器(424)的输出端与数字差分运算器(425)的第二输入端相连。
[0012]
进一步地,所述第一数字采集器(423)和第二数字采集器(424)对巴伦(41)输出的两路反相信号进行模数转换,将巴伦(41)输出的模拟信号转变为数字信号,然后通过数字差分运算器(425)进行减法计算也即数字差分运算,差分输出信号的幅度加倍,且电路噪声被部分抵消。
[0013]
本发明还提供一种低杂散的光调制器偏置控制装置的方法,所述光调制器(2)的输出信号经光耦合器(3)耦合入光探测器(40),光探测器(40)将信号输出给巴伦(41),巴伦(41)将输入信号转换为两路输出信号,这两路信号的幅度相等、相位相反;差分检测模块(42)通过差分检测将巴伦(41)输出的两路信号进行相减处理,由于相位相反,减法运算后信号幅度得到加倍,而信号上叠加的共模噪声被抵消,然后差分检测模块(42)的输出信号生成偏压控制信号对光调制器进行调制。
[0014]
进一步地,所述光调制器(2)的信号输入端被调制的射频信号为v3cos(2πf
x
),差分检测模块(42)输出的偏压控制信号为v0+v1cos(2πfd);其中,fd为导频信号频率,f
x
为工作信号的频率,fd<<f
x
。
[0015]
更进一步地,所述光探测器(40)输出电压为:
[0016]
e(t)=v1cos(2πfdt)+v1acos[2πfdt]+vnꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0017]
其中vn为噪声电压,e(t)为传统非差分检测装置所采用的偏压控制电路的输入误差信号,v1和v1a分别为基波和二次谐波的幅值,v1和v1a均大于vn;
[0018]
对于非差分检测装置,光耦合器的第二输出端(信号输出端)电压为:
[0019]vout
=v3cos(2πf
x
t)+v1bcos[2π(f
x
+fd)t]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0020]
其中,信号f
x
+d是无用的杂散干扰信号,v1b为信号f
x
+d的幅度值,v3为信号f
x
的幅度值。
[0021]
更进一步地,所述巴伦(41)的两个输出端的电压分别为:
[0022][0023][0024]
通过差分检测模块(42)进行减法运算,得到误差信号电压为:
[0025][0026]
实际的差分系统无法做到将噪声完全消除,噪声总会有残留,残留的噪声电压为为噪声抑制比。
[0027]
更进一步地,经过差分检测模块(42)进行差分运算以后,所述光耦合器(3)的第二输出端电压为:
[0028]vout
=v3cos(2πf
x
t)+(v1b/x)cos[2π(f
x
+fd)t]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0029]
其中,v1b/x为信号f
x
+d的幅度值,杂散抑制比为xv3/v1b,相比于非差分检测装置,差分检测模块(42)的杂散抑制比提高了x倍。
[0030]
本发明的优点在于:
[0031]
(1)本发明通过巴伦(41)将输入信号转换为两路输出信号,这两路信号的幅度相等、相位相反;差分检测模块(42)对巴伦(41)输出的两路信号进行相减处理,由于相位相反,因此减法运算后信号幅度得到加倍,而信号上叠加的共模噪声被抵消,提高了误差信号的检测信噪比解决由导频引起的杂散干扰,使光调制器稳定工作。
[0032]
(2)本发明采用差分检测方法来降低系统的共模噪声,提高了误差信号的检测信噪比,从而采用幅度较小的导频信号完成光调制器的偏置工作点控制。由于加载的导频信号幅度小,降低了工作信号的杂散干扰幅度,可应用于高灵敏度通信和大动态雷达系统。由于差分检测带来更高的误差信号检测精度,因此偏置工作点的精度更高。
附图说明
[0033]
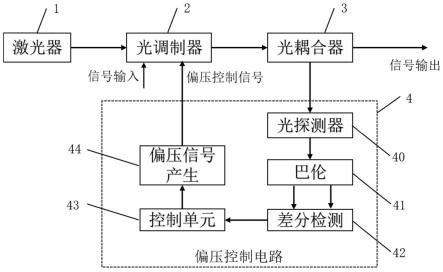
图1为本发明实施例1所公开的一种低杂散的光调制器偏置控制装置的原理示意图;
[0034]
图2为本发明实施例2所公开的一种低杂散的光调制器偏置控制装置的原理示意图;
[0035]
图3为本发明实施例3所公开的一种低杂散的光调制器偏置控制装置的原理示意图。
具体实施方式
[0036]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0037]
实施例1
[0038]
如图1所示,一种低杂散的光调制器偏置控制装置,包括激光器1、光调制器2、光耦合器3和偏压控制电路4,偏压控制电路4包括光探测器40、巴伦41、差分检测模块42、控制单元43和偏压信号产生单元44,光调制器2的输入端与激光器1的输出端相连,光调制器2的输出端与光耦合器3的输入端相连,光耦合器3的第一输出端与光探测器40的输入端相连,光探测器40的输出端与巴伦41的输入端相连,巴伦41的两个输出端分别差分检测模块42的两个输入端相连,所述差分检测模块42的输出端与控制单元43的输入端相连,控制单元43的输出端与偏压信号产生单元44的输入端相连,偏压信号产生单元44的输出端与光调制器2的偏压控制信号输入端相连,输出偏压控制信号;所述巴伦41用以将输入信号转换为两路输出信号,这两路信号的幅度相等、相位相反;所述差分检测模块42对巴伦41输出的两路信号进行相减处理。
[0039]
所述光调制器2包括铌酸锂电光调制器、铌酸锂薄膜电光调制器、磷化铟光调制器和硅光调制器。所述光调制器2的输出信号经光耦合器3耦合入光探测器40,光探测器40将光信号转换为电信号输出给巴伦41,巴伦41将输入信号转换为两路输出信号,这两路信号的幅度相等、相位相反;差分检测模块42通过差分检测将巴伦41输出的两路信号进行相减处理,由于相位相反,减法运算后信号幅度得到加倍,而信号上叠加的共模噪声被抵消,然后差分检测模块42的输出信号生成偏压控制信号对光调制器进行调制。
[0040]
通过以上技术方案,本发明通过巴伦41将输入信号转换为两路输出信号,这两路信号的幅度相等、相位相反;差分检测模块42对巴伦41输出的两路信号进行相减处理,由于相位相反,因此减法运算后信号幅度得到加倍,而信号上叠加的共模噪声被抵消,提高了误差信号的检测信噪比解决由导频引起的杂散干扰,使光调制器稳定工作。
[0041]
实施例2
[0042]
如图2所示,本发明实施例2与实施例1的区别在于:所述差分检测模块42包括运算放大器421以及数字采集单元422,巴伦41的两个输出端分别与运算放大器421的同相输入端及反相输入端连接,运算放大器421的输出端与数字采集单元422的输入端相连。所述运算放大器421对巴伦41输出的两路反相信号进行模拟减法运算,差分输出信号的幅度加倍,且电路噪声被部分抵消,数字采集单元422将巴伦41输出的模拟信号转变为数字信号输出。
[0043]
激光器1为整个系统提供了光源即光载波。光调制器2的功能是进行电-光转换,将需要传输的电信号调制到光载波上,光调制器2的“信号输入”口是电信号的输入口,光调制器2输出的是被电信号调制后的光信号,然后通过光学介质例如光纤进行远距离传输。光调制器2的“偏压控制信号”口用于加载直流偏压信号,确保调制器工作在设定的工作点。光耦合器3用于将输入光信号分为两路,例如光耦合器的分光比为1:99。则光耦合器3的第一输出端(占光耦合器3输入光功率的1%)输入到偏压控制电路4,用于实现自动偏压控制功能。另外一大部分功率(占光耦合器3输入光功率的99%)用于输出有用的调制光信号。
[0044]
偏压控制电路的运行过程如下:光耦合器3的第一输出端输出的光信号通过光探测器40进行光-电转换,得到电误差信号,该误差信号经过巴伦41、运算放大器421和数字采集单元422后被转换为数字误差信号。在控制单元43中对数字误差信号进行运算,具体原理为:基波fd和二次谐波2d的幅度比值跟调制器的偏置工作点具有一定的对应关系,根据基波fd和二次谐波2d的幅度比值可以判断光调制器2偏置工作点是否改变,如果幅度比值偏离了预期,则输出一个控制信号(该控制信号采用pid算法计算得到)给偏压信号产生单元44,通过改变偏压信号产生单元44输出的偏置电压,对光调制器2的偏置工作点进行修正。
[0045]
假设,光调制器2的信号输入端被调制的射频信号为v3cos(2πf
x
),偏压信号产生44输出的偏压控制信号为v0+v1cos(2πfd)。其中,fd为导频信号频率,f
x
为工作信号的频率,fd<<f
x
。光耦合器3的第一输出端接低速的光探测器40,用于将光信号转换为电信号。
[0046]
忽略公约数和不影响结果的高阶项,光探测器40输出电压为:
[0047]
e(t)=v1cos(2πfdt)+v1acos[2πfdt]+vnꢀꢀꢀꢀꢀꢀꢀ
(1)
[0048]
其中vn为噪声电压。
[0049]
对于已有的非差分偏置控制装置,e(t)即为其他非差分偏置控制方案所采用的偏置控制电路的输入误差信号,对该误差信号进行数字采集得到基波fd和二次谐波2fd的幅度比。由于噪声电压的存在,v1和v1a必须大于vn,基波和二次谐波才能被数字采集单元422检测到。
[0050]
忽略公约数系数和不影响结果的高阶项,对于其他非差分偏置控制方案,光耦合器的第二输出端(信号输出端)电压为:
[0051]vout
=v3cos(2πf
x
t)+v1bcos[2π(f
x
+fd)t]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0052]
其中,信号f
x
+fd是无用的杂散干扰信号,由于频率f
x
+fd与频率f
x
很接近,无法通过滤波器进行滤除。信号f
x
与信号f
x
+fd的幅度比值v3/v1b称为杂散抑制比,杂散抑制比越大表明:杂散信号f
x
+fd的幅度相对工作信号f
x
的幅度越小,杂散信号对工作信号的影响越小。
[0053]
对于差分检测系统,巴伦41的两个输出端的电压分别为:
[0054][0055][0056]
通过运算放大器421进行减法运算,得到运算放大器421的输出电压为:
[0057][0058]
实际的差分系统无法做到将噪声完全消除,噪声总会有残留,残留的噪声电压为为噪声抑制比。此时v1和v1a均大于基波和二次谐波可被数字采集单元422检测到。
[0059]
对于本发明提出的差分检测,导频信号的幅度降低了倍,从而光耦合器的第二输出端(信号输出端)电压变为:
[0060]vout
=v3cos(2πf
x
t)+(v1b/x)cos[2π(f
x
+fd)t]
ꢀꢀꢀꢀꢀꢀ
(6)
[0061]
其中,信号f
x
+d是无用的杂散干扰信号,v1b/x为信号f
x
+d的幅度值。杂散抑制比为
xv3/v1b,相比于非差分检测装置,差分检测装置的杂散抑制比提高了x倍。
[0062]
需要说明的是,公式(2)可以认为是传统非差分方案的输出信号电压。而公式(6)是本发明的基于差分检测的系统输出电压,杂散抑制比提高了x倍,杂散更小了。
[0063]
综上,本发明光探测器输出(40)的电压就是其他偏置控制方案所采用的偏置控制装置的输入“误差信号”,然后本发明采取差分检测方法,对“误差信号”进行差分计算,这种方法好处是:提高了对误差信号的检测灵敏度,也就是说比传统方案更弱的误差信号都能检测到,fd是误差信号,v1是误差信号的幅度,将fd的幅度降低x倍,降低为v1/x,仍然能检测到误差信号。
[0064]
实施例3
[0065]
如图3所示,本发明实施例3与实施例2的区别在于差分检测模块42的具体结构不同,所述差分检测模块42包括第一数字采集器423、第二数字采集器424以及数字差分运算器425,巴伦41的两个输出端分别与第一数字采集器423以及第二数字采集器424的输入端连接,第一数字采集器423的输出端与数字差分运算器425的第一输入端相连,第二数字采集器424的输出端与数字差分运算器425的第二输入端相连。所述第一数字采集器423和第二数字采集器424对巴伦41输出的两路反相信号进行模数转换,将巴伦41输出的模拟信号转变为数字信号,然后通过数字差分运算器425进行减法计算也即数字差分运算,差分输出信号的幅度加倍,且电路噪声被部分抵消。因此,数字差分检测也同样提高了误差信号的检测信噪比,从而采用幅度较小的导频信号完成光调制器的偏置工作点控制,降低了工作信号的杂散干扰幅度。
[0066]
综上所述,现有技术基于导频法的偏压控制装置具有不受外界温度影响和抗干扰能力强的特点,但导频信号会混叠到工作信号上,产生不应有的杂散信号。在实施例2和实施例3中的光调制器偏置控制装置及方法,利用了差分检测方法提高了误差信号的检测信噪比,因此可以减小输入导频信号的幅度,从而降低了工作信号上的杂散信号强度。该光调制器偏压控制装置可应用于光纤通信、激光通信和光载射频系统。
[0067]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1