一种雷达点云数据的格式转换方法、系统及存储介质与流程
1.本技术涉及点云数据处理的技术领域,尤其是涉及一种雷达点云数据的格式转换方法、系统及存储介质。
背景技术:
2.现有的雷达点云数据存储一般都以float数据类型为基础,再以三组(x、y、z三维坐标)或更多组数据(雷达强度、点云色彩)共同组成描述单一坐标点的数据组合,多个组合在一起共同组成一个统一的关于点云数据坐标的数据集。
3.由此可见,每个点云数据坐标的数据长度至少为16bit*3=48bit,而一个包含10000个点云数据的数据集的大小就至少为48bit*10000/1024=468.75kb,该尺寸已经远远超过了一张相同像素数量的压缩图片。如以每秒10次采样的频率进行统计,其1小时内的数据传输量就大约为16gb,其大小也已经远远超过同等像素量的高清流媒体视频的传输量,对网络和相关设备造成了极大的负担。
4.另外,随着雷达设备精度的提升,单个点云数据集的尺寸只会越来越大,最终造成每小时几十甚至上百gb的数据传输压力。无论是对设备的网络负载,还是数据的处理能力都造成了极大的负荷,提高了设备成本,造成了不必要的浪费。
技术实现要素:
5.为了有助于解决上述问题,本技术提供一种雷达点云数据的格式转换方法、系统及存储介质。
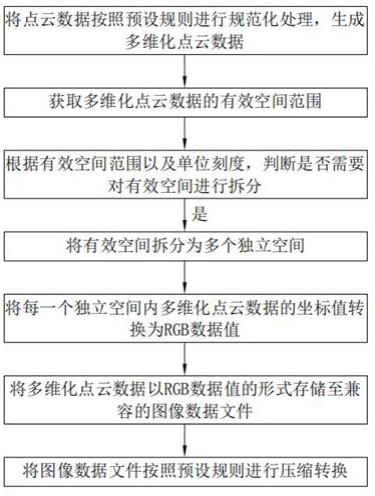
6.第一方面,本技术提供的一种雷达点云数据的格式转换方法,采用如下的技术方案:一种雷达点云数据的格式转换方法,包括:将点云数据按照预设规则进行规范化处理,生成多维化点云数据;获取所述多维化点云数据的有效空间范围;根据所述有效空间范围以及单位刻度,判断是否需要对有效空间进行拆分,如果是,则将所述有效空间拆分为多个独立空间;将每一个所述独立空间内多维化点云数据的坐标值转换为rgb数据值;将所述多维化点云数据以rgb数据值的形式存储至兼容的图像数据文件;将所述图像数据文件按照预设规则进行压缩转换。
7.通过采用上述技术方案,将不规则的点云float类型数据转换为规则的整数数据集,并将其转换为图像数据集,该图像数据集便可以进行数据压缩,通过该方法不但可以大幅减少点云数据的体积,减少数据传输量,降低系统间的带宽要求,更可以对点云数据进行实时传输,在设备和平台成本总体不变的前提下,大幅提升数据传输的效率,增强系统的体验,从而为点云数据进一步的处理优化工作提供充分而必要的条件。
8.可选的,所述根据所述有效空间范围以及单位刻度,判断是否需要对有效空间进
行拆分,如果是,则将所述有效空间拆分为多个独立空间步骤,具体包括:判断所述有效空间范围是否超过255个单位刻度;如果是,则将有效空间拆分为多个独立空间,所述独立空间的范围不超过255个单位刻度。
9.可选的,所述将每一个所述独立空间内多维化点云数据的坐标值转换为rgb数据值步骤之前,还包括:将每个独立空间内的范围、单位刻度、数据拆分数量、多维化点云数据的数量记入还原文件。
10.可选的,所述将每一个所述独立空间内多维化点云数据的坐标值转换为rgb数据值步骤之后,还包括:将每一个所述独立空间内多维化点云数据的强度信息值转换为透明度数值。
11.可选的,所述将每一个所述独立空间内多维化点云数据的坐标值转换为rgb数据值步骤之后,还包括:将每一个所述独立空间内多维化点云数据的色彩描述信息,视为一个独立的点存储于相邻像素中。
12.可选的,所述将所述多维化点云数据以rgb数据值的形式存储至兼容的图像数据文件步骤之后,还包括:在所述独立空间内的多维化点云数据无法完全填充固定分辨率的图像数据文件的情况下,则将多个独立空间内的多维化点云数据填充至同一个图像数据文件中。
13.可选的,所述将所述图像数据文件按照预设规则进行压缩转换步骤,包括:根据图像数据压缩方式或流媒体编码方式对图像数据文件进行转换后存储或传输。
14.第二方面,本技术提供的一种雷达点云数据的格式转换系统,采用如下的技术方案:一种雷达点云数据的格式转换系统,包括:处理模块,用于将点云数据按照预设规则进行规范化处理,生成多维化点云数据;选取模块,用于获取所述多维化点云数据的有效空间范围;拆分模块,用于根据所述有效空间范围以及单位刻度,判断是否需要对有效空间进行拆分,如果是,则将所述有效空间拆分为多个独立空间;第一转换模块,用于将每一个所述独立空间内多维化点云数据的坐标值转换为rgb数据值;存储模块,用于将所述多维化点云数据以rgb数据值的形式存储至兼容的图像数据文件;第二转换模块,用于将所述图像数据文件按照预设规则进行压缩转换。
15.第三方面,本技术提供的一种计算机存储介质,采用如下的技术方案:一种计算机存储介质,存储有能够被处理器加载并执行如第一方面和第二方面所述方法中的计算机程序。
16.综上所述,本技术包括以下有益技术效果:将不规则的点云float类型数据转换为规则的整数数据集,并将其转换为图像数
据集,该图像数据集便可以进行数据压缩,通过该方法不但可以大幅减少点云数据的体积,减少数据传输量,降低系统间的带宽要求,更可以借助现存的、比较成熟的流媒体传输技术对点云数据进行实时传输,在设备和平台成本总体不变的前提下,大幅提升数据传输的效率,增强系统的体验,从而为点云数据进一步的处理优化工作提供充分而必要的条件。
附图说明
17.图1是本技术其中一实施例示出的雷达点云数据的格式转换方法的流程图。
具体实施方式
18.以下结合附图对本技术作进一步详细说明。
19.本技术实施例公开一种雷达点云数据的格式转换方法。
20.作为格式转换方法的一种实施方式,包括:100,将点云数据按照预设规则进行规范化处理,生成多维化点云数据。
21.其中,步骤100包括:101,创建多维数据空间。
22.具体的,根据点云数据的最大坐标和最小坐标之间的区域确定空间范围,根据点云数据的密度确定空间坐标系刻度,基于空间范围以及空间坐标系刻度,创建多维数据空间。
23.102,将点云数据载入多维数据空间,生成点云数据的二进制数据集。
24.具体来说,将点云数据载入空间坐标系,并使得尽量多的点云数据落在空间坐标系刻度上,若空间坐标系刻度上存在点云数据则赋值为1,不存在点云数据则赋值为0,根据空间坐标系刻度的赋值,生成二进制数据集。
25.103,获取其他设备的采集数据;其中,所述采集数据包括点云数据和图像像素数据。
26.针对同一目标物体,利用其他雷达设备采集点云数据,或者摄像设备获取图像像素数据。
27.104,将采集数据载入多维数据空间,生成采集数据的二进制数据集。
28.需要说明的是,在利用其他雷达设备采集点云数据的情况下,利用上述步骤102的方式生成点云数据的二进制数据集。
29.在利用摄像设备获取图像像素数据的情况下,将图像像素数据载入空间坐标系,并使得尽量多的点云图像像素数据落在空间坐标系刻度上;空间坐标系刻度上存在图像像素数据则赋值为1,不存在图像像素数据则赋值为0;并基于步骤102的方式生成图像像素数据的二进制数据集。
30.105,根据所述点云数据的二进制数据集和采集数据的二进制数据集,获取点云数据长度以及采集数据长度;基于点云数据长度以及采集数据长度进行对比,形成等比例对应关系。
31.具体的,点云数据长度为有效数值区间的长度,其中有效数据值区间为空间坐标系刻度的赋值为1的区间,采集数据长度为点云数据的数量或者图像像素的数量。假设点云数据长度为5000,采集数据长度为1000,则两者的等比例对应关系为5:1。
32.106,基于所述等比例对应关系,将点云数据和图像像素数据进行融合,或者将点云数据和点云数据进行融合,得到多维点云融合数据。
33.对点云数据进行简化和规范化处理,并将点云数据集转换为以长方体或立方体空间坐标系为存储空间的,以二进制0和1为标识的二进制数据集,从而使得将不规则的点云float类型数据转换为规则的整数数据集。
34.200,获取所述多维化点云数据的有效空间范围。
35.需要说明的是,选定需要处理的多维化点云数据的有效空间范围,即。
36.例如:雷达设备采集整个房间内的点云数据,在进行处理后得到多维化点云数据,但本次只需要针对房间内的其中一个家具(如桌子)进行处理,则可以根据该家具所在的位置进行坐标限定,仅选择该家具所在的有效空间范围。
37.300,根据所述有效空间范围以及单位刻度,判断是否需要对有效空间进行拆分,如果是,则将所述有效空间拆分为多个独立空间。
38.其中,步骤300具体包括:301,判断所述有效空间范围是否超过255个单位刻度;302,如果是,则将有效空间拆分为多个独立空间,所述独立空间的范围不超过255个单位刻度。
39.具体的,对整数数据集进行规范化处理,即将一个范围广阔的有效空间切分为一个个以255cm(兼容24位真彩色,数据精度即单位刻度为1cm;如单位刻度为2cm则其范围为511cm,同理也可以兼容16位增强色或其他类型)为极限的立体数据空间。该数据空间在每一个方向上都可以自定义数据精度和极限长度,唯一需要确保即极限长度不超过255个单位刻度。
40.结合单位刻度的精度设定,将有效空间切分为一个或多个独立空间,可以根据需要自定义切分规则,如沿某一个坐标进行二等分,或对整个有效空间进行八等分。
41.举例来说,沿z坐标轴拆分为若干段,则x轴和y轴根据范围和单位刻度进行填充,形成独立空间。
42.400,将每一个所述独立空间内多维化点云数据的坐标值转换为rgb数据值。
43.具体的,将拆分后的每一个独立空间中的多维化点云数据的xyz坐标值按照对应关系转换为rgb色彩值。
44.500,将每一个所述独立空间内多维化点云数据的强度信息值转换为透明度数值。
45.在多维化点云数据包含有强度信息值的情况下,将其转换为对应的透明度数值。
46.600,将每一个所述独立空间内多维化点云数据的色彩描述信息,视为一个独立的点存储于相邻像素中。
47.需要说明的是,点云数据是指在一个三维坐标系统中的一组向量的集合,数据集中的每个点包含有三维坐标,有的可能含有色彩描述信息或强度信息值。
48.如果多维化点云数据包含有色彩描述信息,为便于后续使用,则将其视为一个独立的点存于其相邻像素中。即每一个多维化点云数据对应两个像素点,其中一个是由多维化点云数据的坐标值转换得到,另一个是多维化点云数据自带的色彩描述信息。
49.将以float数据类型为主体的点云数据x、y、z、i(可选,强度信息值)的空间坐标,以一种对应的关系转换为以r、g、b、alpha(可选,透明度数值)为主体的图像数据集。
50.700,将所述多维化点云数据以rgb数据值的形式存储至兼容的图像数据文件。
51.具体的,将所述多维化点云数据以像素色彩值的方式存入兼容的图像数据文件中,如bmp。
52.800,将所述图像数据文件按照预设规则进行压缩转换。
53.具体的,根据图像数据压缩方式或流媒体编码方式对图像数据文件进行转换后存储或传输。
54.根据需要将bmp文件以最高质量进行压缩转换,比如将图像数据文件从bmp格式转换为jpg、png等较为通用的图像数据格式后再进行数据传输(单张图片按照分辨率计算可以存储数量庞大的数据点,如以1080p分辨率的图片为例,其可以容纳的点云数据个数为2,073,600个);或者直接将图像数据文件通过h265等方式编码转换为流媒体格式进行传输,都可以大幅降低数据传输量。
55.另外,在每一个独立空间内的多维化点云数据无法完全填充固定分辨率的图像数据文件的情况下,则可以同时将多个独立空间内的多维化点云数据填充至同一个图像数据文件中;其中,图像数据文件的分辨率按照需要可以进行自定义设置。
56.作为格式转换方法的另一种实施方式,还包括:将每个独立空间内的范围、单位刻度、数据拆分数量、多维化点云数据的数量记入还原文件,如:x:min x:max y:min y:max z:min z:max split:number point:number,其中,数据拆分数量表示一个多维化点云数据拆分的数量,即独立空间的数量。在指定数据时通过以上数据还原每一个像素其对应的独立空间。
57.基于上述雷达点云数据的格式转换方法,本技术实施例还公开了一种雷达点云数据的格式转换系统,包括:处理模块,用于将点云数据按照预设规则进行规范化处理,生成多维化点云数据;选取模块,用于获取所述多维化点云数据的有效空间范围;拆分模块,用于根据所述有效空间范围以及单位刻度,判断是否需要对有效空间进行拆分,如果是,则将所述有效空间拆分为多个独立空间;第一转换模块,用于将每一个所述独立空间内多维化点云数据的坐标值转换为rgb数据值;存储模块,用于将所述多维化点云数据以rgb数据值的形式存储至兼容的图像数据文件;第二转换模块,用于将所述图像数据文件按照预设规则进行压缩转换。
58.本技术实施例还公开了一种计算机可读存储介质,存储有能够被处理器加载并执行如上述格式转换方法的计算机程序,该计算机可读存储介质例如包括:u盘、移动硬盘、只读存储器(read-onlymemory,rom)、随机存取存储器(randomaccessmemory,ram)、磁碟或者光盘等各种可以存储程序代码的介质。
59.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1