一种可自动沉放的高分辨率实时3D的海洋牧场监测装置的制作方法
一种可自动沉放的高分辨率实时3d的海洋牧场监测装置
技术领域
1.本实用新型涉及海洋牧场的监测和运维管理领域,具体为一种可自动沉放的高分辨率实时3d的海洋牧场监测装置。
背景技术:
[0002]“海洋牧场”是指在一定海域内,采用规模化渔业设施和系统化管理体制,利用自然的海洋生态环境,将人工放流的经济海洋生物聚集起来,像在陆地放牧牛羊一样,对鱼、虾、贝、藻等海洋资源进行有计划和有目的的海上放养。开展海洋牧场建设,其一是为了提高某些经济品种的产量或整个海域的鱼类产量,以确保水产资源稳定和持续的增长。其二是在利用海洋资源的同时重点保护海洋生态系统,实现可持续生态渔业。
[0003]
海洋牧场复杂的生境结构增加了量化海洋牧场鱼类、底栖动物等生物资源量大小的难度,传统的流刺网、地笼调查、声学、水下摄像的调查方法对查明海洋牧场人工鱼礁不同生物资源量大小均存在不足,尚无规范有效的牧场生物资源调查方法,也一定程度上使得生态系统模型评估的准确性存疑。
技术实现要素:
[0004]
针对现有技术中存在的问题,本实用新型提供一种可自动沉放的高分辨率实时3d的海洋牧场监测装置。
[0005]
本实用新型是通过以下技术方案来实现:
[0006]
一种可自动沉放的高分辨率实时3d的海洋牧场监测装置,包括船载控制系统、网箱、滑轨、距离选通激光成像装置和自主沉放系统,所述距离选通激光成像装置通过滑轨滑动设置于网箱中,所述距离选通激光成像装置包括照明单元和两个固态摄像头单元,所述自主沉放系统设置于与固态摄像头单元输入端相对的一侧,所述固态摄像头单元的输出端与船载控制系统的输入端连接。
[0007]
优选的,所述照明单元和两个固态摄像头单元集成在一个外壳内部,所述照明单元的照明端和固态摄像头的输入端朝向外壳外部。
[0008]
优选的,所述自主沉放系统包括压水舱和压载抽水系统,所述压水舱与外壳连接,所述压载抽水系统与压水舱连通。
[0009]
优选的,所述压水舱上连接有保护绳。
[0010]
优选的,所述压水舱远离外壳的一端与滑轨连接。
[0011]
优选的,所述外壳的外侧设有保护罩,所述保护罩由透明材料制成;所述照明单元的照明端和固态摄像头单元的输入端均朝向保护罩,所述保护罩与压水舱表面连接。
[0012]
优选的,所述滑轨设置为多层圆形内和十字导轨,多层圆形内和十字导轨位于同一平面上,所述滑轨由船载控制系统进行远程控制。
[0013]
优选的,所述滑轨的滑动模块与保护罩之间连接杆,所述连接杆呈伸缩式设置。
[0014]
优选的,所述连接杆与保护罩之间设有旋转云台,所述旋转云台与滑动模块球铰
连接,所述旋转云台的旋转角度由船载控制系统进行控制。
[0015]
优选的,所述滑轨上还滑动设置有高清水下摄像头,所述高清水下摄像头以球铰形式与旋转云台连接。
[0016]
与现有技术相比,本实用新型具有以下有益效果:
[0017]
本实用新型采用的可自动沉放的高分辨率实时3d的海洋牧场监测装置可以对不同深度的不同水体中的海洋牧场装置实现实时全景3d监测,无需潜水员的辅助即可实现全天候的自动观测。同时基于距离选通激光成像装置,可以实现对于牧场网箱中的鱼的动态捕捉和分析,通过对于不同水域的衰减度的设计,可以计算出不同的水下成像距离;对距离选通的激光成像装置的数据进行处理,可实现对于网箱中鱼的形状的监测为高效的运行海洋牧场提供极好的数据支撑。
[0018]
距离选通的激光成像技术的原理为:利用激光脉冲到达相机的飞行时间(tof):从目标反射的光将比沿到达目标的路径反向散射更晚到达相机。
[0019]
其主要原理如图6所示:近距离和远距离目标的反射在时间上是分开的。一系列激光脉冲用于覆盖预设范围。由于激光的高脉冲速率,8m的范围将在不到十分之一秒内覆盖。减少的反向散射可提供更清晰的海底图像,到目标的距离可提供3d点云,可实现3d成像与运动物体的监测。
[0020]
进一步的,设置多层圆形内和十字滑轨是为了符合网箱的规格与距离选通激光成像装置的镜头焦距的要求。
[0021]
进一步的,通过设置旋转云台使得距离选通激光成像装置可以实现拍摄角度变化。
[0022]
进一步的,自主沉放系统用于沉放的距离选通激光成像装置,通过加载水,在水下实现压水舱朝下的设计,从而可以实现距离选通激光成像装置向上拍摄。为实现压水舱朝下,在加载水之后其自重要远远大于距离选通激光成像装置的重量,压水舱中加载水时,固态摄像头的输入端朝向滑轨的一侧。
[0023]
进一步的,在沉放过程中,保护绳可以防止因水流原因而对距离选通激光成像装置的定位造成影响。在拍摄结束之后,可通过上方的抽水设备抽空压水舱中的压载水,并且通过保护绳将距离选通激光成像装置提升至水下以上。
[0024]
进一步的,设置高清水下摄像头是为了节省开支,网箱上部的光线较为充足,使用高清水下摄像头即可满足监测要求。而网箱的深水处光线较弱,使用距离选通激光成像装置进行监测。
附图说明
[0025]
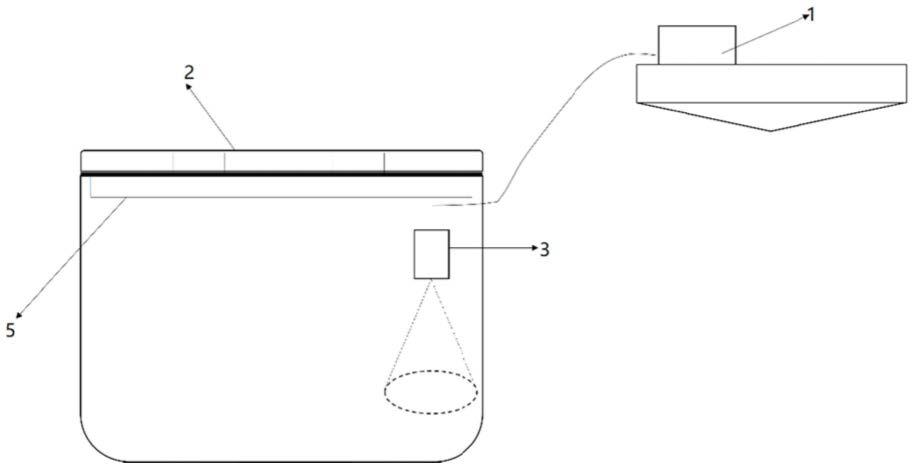
图1为本实用新型一种可自动沉放的高分辨率实时3d的海洋牧场监测装置的结构示意图;
[0026]
图2为本实用新型一种可自动沉放的高分辨率实时3d的海洋牧场监测装置的拍摄状态示意图;
[0027]
图3为本实用新型一种可自动沉放的高分辨率实时3d的海洋牧场监测装置的自主沉放系统的使用示意图;
[0028]
图4为本实用新型一种可自动沉放的高分辨率实时3d的海洋牧场监测装置的自主
沉放系统的示意图;
[0029]
图5为本实用新型一种可自动沉放的高分辨率实时3d的海洋牧场监测装置的滑轨的俯视图;
[0030]
图6为距离选通的激光成像技术的原理示意图。
[0031]
图中,1、船载控制系统;2、网箱;3、距离选通激光成像装置;4、自主沉放系统;5、滑轨;6、保护罩;7、压水舱;8、保护绳;9、管道。
具体实施方式
[0032]
下面结合具体的实施例对本实用新型做进一步的详细说明,所述是对本实用新型的解释而不是限定。
[0033]
本实用新型公开了一种可自动沉放的高分辨率实时3d的海洋牧场监测装置,参照图1、2和3,包括船载控制系统1、网箱2、滑轨5、距离选通激光成像装置3和自主沉放系统4,距离选通激光成像装置3通过滑轨5滑动设置于网箱2中,距离选通激光成像装置3包括照明单元和两个固态摄像头单元,用于监测网箱2中鱼的形状。
[0034]
船载控制系统1用于接收距离选通激光成像装置3传输的信号。
[0035]
照明单元和两个固态摄像头单元集成在一个外壳内部,外壳与滑轨5连接,照明单元的照明端和固态摄像头的输入端朝向外壳外部。
[0036]
参照图4,外壳上还设有保护罩6,保护罩6由透明材料制成;照明单元的照明端和固态摄像头单元的输入端均朝向保护罩6。
[0037]
参照图5,滑轨5设置为多层圆形内和十字导轨,多层圆形内和十字导轨位于同一平面上,滑轨5上的滑动模块由船载控制系统1进行远程控制,本实施例中滑轨5为铝合金直线滑轨5,滑动模块沿着滑轨5滑移,尺寸为长度为网箱2直径,宽度为30cm。
[0038]
保护罩6与滑轨5之间设有连接杆,连接杆的一端与滑轨的滑动模块之间采用球形铰接,连接杆呈伸缩式设置。
[0039]
连接杆与保护罩6之间还设有旋转云台,旋转云台与连接杆之间采用球形铰接,旋转云台的旋转角度由船载控制系统1进行控制,旋转云台带动保护罩6进行角度转动,从而使得距离选通激光成像装置3可以实现拍摄角度变化。
[0040]
滑轨5上还滑动设置有高清水下摄像头,用于检测水深为时的监测,水深为通过高清摄影头可以清晰拍摄的深度,根据水的特质变化。
[0041]
自主沉放系统4设置于与固态摄像头单元输入端相对的一侧,用于控制距离选通激光成像装置3在网箱2中的深度。自主沉放系统4包括压水舱7、压水设备和抽水设备,压水舱7与外壳连接,压水设备和抽水设备均通过管道与压水舱7连通;当压水舱7中加载水时,固态摄像头的输入端朝向滑轨5的一侧。
[0042]
外壳靠近压水舱7的一端设有保护绳8,另一端系在顶端框架下部,用滑轮连接,可跟随滑动。
[0043]
本实用新型一种可自动沉放的高分辨率实时3d的海洋牧场监测装置采用的可自动沉放的高分辨率实时3d的海洋牧场监测装置可以对不同深度的不同水体中的海洋牧场装置实现实时全景3d监测,无需潜水员的辅助即可实现全天候的自动观测。同时基于距离选通激光成像装置3,可以实现对于牧场网箱2中的鱼的动态捕捉和分析,通过对于不同水
域的衰减度的设计,可以计算出不同的水下成像距离;对距离选通激光成像装置3的数据进行处理,可实现对于网箱2中鱼的形状的监测为高效的运行海洋牧场提供极好的数据支撑。
[0044]
自主沉放系统4用于沉放的距离选通激光成像装置3,通过加载水,在水下实现压水舱7朝下的设计,从而可以实现距离选通激光成像装置3向上拍摄。为实现压水舱7朝下,在加载水之后其自重要远远大于距离选通激光成像装置3的重量。在沉放过程中,保护绳8可以防止因水流原因而对距离选通激光成像装置3的定位造成影响。在拍摄结束之后,可通过上方的抽水设备抽空压水舱7中的压载水,并且通过保护绳8将距离选通激光成像装置3提升至水下以上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1