一种便携式镜框扫描仪的制作方法
1.本实用新型涉及一种便携式镜框扫描仪。更具体的说,本实用新型涉及一种采用摄像头来获取镜框3d模型立体数据的便携式镜框扫描仪。
背景技术:
2.日常生活中,绝大多数人都因为近视、远视或老化等眼视屈光不正要去眼镜店验配眼镜。配镜通常要经历镜架选择、验光、镜片准备、装配的过程。镜片一般分现片和车房片,所有这些镜片最初始呈现的形状一般为圆形和且无明显的品牌logo。镜片需要割边后才能装入镜框,所以镜框内槽形状和尺寸数据要非常精确,否则割完边的镜片要么装不进镜框,要么镜片尺寸小会掉出来。能采集镜框内槽形状和尺寸数据的仪器,就是镜框扫描仪。由于镜框左右眼是对称的,所以一般只要测量其中一个眼睛的镜框数据就可以。
3.随着人们生活水平的提高,消费者的品牌意识越来越强烈。消费者希望改变镜架有logo而镜片没有logo的局面,于是很多人希望在镜片不影响视觉的合适位置,打上漂亮的logo,其中以深紫外的激光标识最为漂亮且不伤镜片尤为让人喜欢。这些激光标识logo,可以是个性化的文字和图案,也可以是镜片厂家的品牌logo.这些激光标识一般位于颞侧上方才会美观且不会影响视觉效果。可是因为这样的激光标识设备往往非常昂贵,能装备的眼镜店寥寥无几,所以一般眼镜店往往希望镜片生产厂家或割边装配中心可以提供打标服务。可是镜片生产厂家或割边装配中心往往缺乏佩戴者的镜框数据,无法精确定位而爱莫能助。
4.如果眼镜店有镜框扫描仪,能把镜框数据和验光处方数据传给镜片厂家或割边装配中心,镜片厂家或割边中心就根据镜框形状和验光数据进行定位打标,后续眼镜门店割边装配后,激光标识就在需要的颞侧上方,这样事情就解决了。所以要走通这条路,眼镜门店有否镜框扫描仪至关重要。
5.目前市面上存在两种镜框扫描仪,一种是采用机械式探针扫描的镜框扫描仪,一种是采用拍照式的镜框扫描仪。前者采用接触式机械探针360度旋转扫描镜框内槽,同时探针又可以上下移动,这样就可以得到(ρ,θ,z)。由于镜框有拼接断点和焊点,镜框内槽往往不是光滑的,这样经常引起机械扫描探针卡涩而不能顺利工作,所以操作者非常不喜欢使用;另外探针在镜框内槽中有串动,也会引起测量精度的误差,使用的人非常少。而市面上的拍照式镜框扫描仪,易用但只从1个方向拍照,只能形成镜框的平面轮廓数据,但是镜框实际是一个弧面,所以目前的拍照镜框扫描仪不能正确反映镜框的形状,切割后的镜片需要人工修整成弧形才能装入镜框,经常有装不上的情况,所以目前这种镜框扫描仪需要技术上的提升。但不管是哪种镜框扫描仪,目前售价都在1万左右,同时又不是很好用,所以眼镜店的配备普及率非常低。
6.综上所说,要让每个消费者的眼镜有一个漂亮的品牌logo或个性标识,眼镜店有没有精确的镜框扫描仪进行镜框数据的采集是关键的一环。眼镜店对镜框扫描仪的投入又有价格上的考虑。因此所以眼镜行业迫切需要一款精度高,使用方便,成本低的非接触式扫
描镜框内槽3d形状和尺寸的镜框扫描仪,本实用新型应运而生。
技术实现要素:
7.本实用新型的目的是解决以上提出的问题,在拍照式镜框扫描仪的基础上,进行无接触测量镜框的内槽形状,提供一种非接触,能精确生成(ρ,θ,z)数据的3d镜框扫描仪,体积小巧,便于携带。
8.本实用新型是通过以下技术方案实现的:
9.本实用新型公开了一种便携式镜框扫描仪,镜框扫描仪包括机身、与机身活动连接的潜望臂、开设于潜望臂壁面上的通光孔,设置机身内,且能通过通光孔接受目标物光线的拍照光学系统a,潜望镜为相对于机身0-360度的旋转结构。
10.作为进一步地改进,本实用新型所述的拍照光学系统a为编码器光学系统或非编码器光学系统。
11.作为进一步地改进,本实用新型所述的非编码器光学系统为包括设置于通光孔后方、位于潜望臂内且让光轴转向的光轴偏转器件,在光轴偏转器件出射光轴上的镜头和图像传感器,通过镜头和光轴偏转器件所成的像在图像传感器上跟踪旋转。
12.作为进一步地改进,本实用新型所述的光轴转向角度优选为80-100度。
13.作为进一步地改进,本实用新型所述的编码器光学系统为包括设置于通光孔后方,位于潜望臂内镜头和图像传感器,及编码器;图像传感器能接受通过通光孔的目标物光线所述的通光孔为圆形或矩形或其他满足应用的确定形状。
14.作为进一步地改进,本实用新型所述的编码器的码盘固定设置于潜望臂的上,编码器的读数头与码盘相对应,设置于机身上,编码器用于测量潜望臂的旋转角度。
15.作为进一步地改进,本实用新型所述的图像传感器位于镜头后方,图像传感器为ccd或cmos相机及其他可以获得镜框平面图像的光电传感器。
16.作为进一步地改进,本实用新型所述的数据处理板,所述的数据处理板,用于收集上述图像传感器收集的图像数据,打包上传到外设图像处理单元;或对图像数据进行处理,对得到的镜框平面轮廓图像和镜框内槽弧面图像进行处理,从而得到镜框内槽形状和弧面的数据,融合两者数据生成镜框oma文件。
17.作为进一步地改进,本实用新型所述的还包括另一个拍照光学系统b,拍照光学系统b包括镜头和位于镜头后方的图像传感器,能对外直接拍照。
18.作为进一步地改进,本实用新型当光学系统在满足应用的最小视场角fov时(图像传感器上刚好可以完整呈现最大镜框的平面轮廓),wh为镜框扫描仪距离被测镜框一定距离l时光学系统在通光孔处的最大视场范围。wh随距离l,图像传感器的感光面大小和光学系统的fov变化而变化。当wh小于或等于通光孔宽度或直径时,扫描仪仅包括拍照光学系统a,通过拍照光学系统a分别拍摄镜框内槽形状和镜框弧面数据;当wh大于通光孔宽度或直径时,通过拍照光学系统a拍摄镜框内槽弧面形状,通过拍照光学系统b拍摄镜框平面轮廓数据。
19.本实用新型的有益效果如下:
20.1、本实用新型所述的镜框扫描仪融合了目前两大镜框扫描仪的优点,抛弃了他们的缺点,依靠智能手机的高性能相机模组、数据处理和传输软硬件平台,创新地提出了一种
成本低、可靠性高、操作简单的、基于智能手机的无接触便携式镜框扫描仪,可以给配镜行业带来颠覆性的变革,让眼镜集中装配,精准装配的多年行业愿望得到实现。
21.2、本实用新型通过对潜望系统拍摄的图像的边缘特征进行处理,非常巧妙地得到拍摄图像360度内的旋转角度信息,省略了旋转角度定位的编码器或分度机构,简单的结构提高了设备的耐用性和易用性。
22.3、本实用新型仅通过1次镜框轮廓拍照和1次镜框内槽360度手动旋转扫描拍照,结合已知的内槽截面形状,就可以采集到镜框的三维(ρ,θ,z)数据,生成镜框三维数据(如oma格式)给镜片磨边机使用。具有非接触,精度高的特点。
附图说明
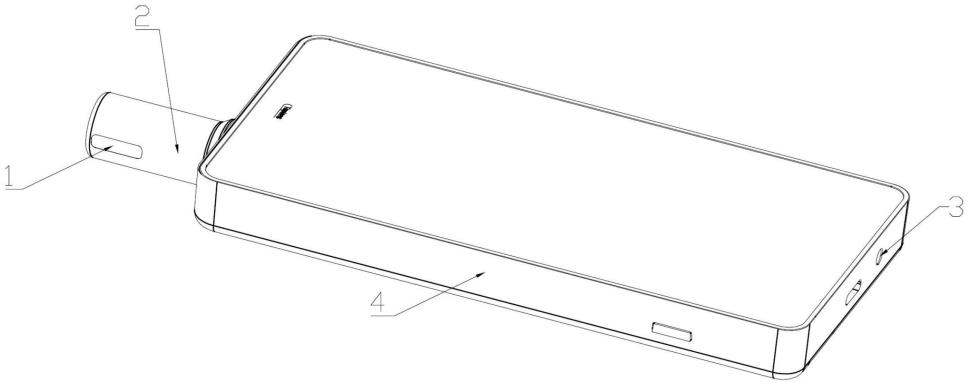
23.图1是实用新型的产品结构示意图;
24.图2a是用拍照光学系统b拍摄镜框轮廓的拍照示意图;
25.图2b是用拍照光学系统a拍摄镜框轮廓拍照的示意图;
26.图3a是镜框内槽360度旋转扫描拍照示意图;
27.图3b是非编码器光学系统的镜框扫描仪剖视结构示意图;
28.图3c是编码器光学系统的镜框扫描仪剖视结构示意图;
29.图4是平面轮廓测量示意图;
30.图5是标定镜框轮廓尺寸示意图;
31.图6是测量镜框内槽时,图像传感器上的典型示意图;
32.图7是镜框内槽剖面示意图;
33.图8是数据拟合和校正后的典型镜框3d形状。
34.1通光孔;2潜望臂;3拍照光学系统b;4机身;5镜框内槽;6镜框平面轮廓;7光轴偏转器件;8镜头;9图像传感器;10数据处理板,11编码器。
具体实施方式
35.本实用新型公开了一种便携式镜框扫描仪,图1是实用新型的产品结构示意图;镜框扫描仪包括机身4、与机身4活动连接的潜望臂2、开设于潜望臂2壁面的通光孔1,设置机身4内,且能通过通光孔1接受目标物光线的拍照光学系统a,潜望镜为相对于机身4可以0-360度的旋转结构。
36.图3b为非编码器11光学系统的镜框扫描仪剖视结构示意图;图3c为编码器11光学系统的镜框扫描仪剖视结构示意图。
37.拍照光学系统a分为编码器11光学系统或非编码器11光学系统。非编码器11光学系统为包括非编码器11光学系统为包括设置于通光孔1后方、位于潜望臂2内且让光轴转向的光轴偏转器件7,及设置于机身4内、在光轴偏转器件7出射光轴上的镜头8和图像传感器9,通过镜头8和光轴偏转器件7所成的像在图像传感器9上跟踪旋转。所述的光轴转向角度优选为80-100度。光轴转向角度偏离90度越大,图像传感器的感光面积就必须越大。优选为光轴偏转90度的光轴偏转器件7,可以是45度放置的平面镜,也可以是带反射膜的棱镜或者全内反射棱镜。编码器11光学系统为包括设置于通光孔1后方,位于潜望臂2内镜头8和图像传感器9,及编码器11;图像传感器9能接受通过通光孔1的目标物光线。编码器11的码盘固
定设置于潜望臂2的上,编码器11的读数头与码盘相对应,设置于机身4上,编码器11用于测量潜望臂2的旋转角度。
38.图像传感器9位于镜头8后方,图像传感器9为ccd或cmos相机等其他可以获得镜框平面图像的光电传感器,数据处理板10,用于收集上述图像传感器9收集的图像数据,打包上传到外设图像处理单元;或对得到的镜框平面轮廓6图像和镜框内槽5弧面图像进行处理,从而得到镜框内槽5形状和弧面的数据,结合镜框平面数据,并融合两者数据生成镜框三维oma格式文件。
39.本实用新型还包括另一个拍照光学系统b3,拍照光学系统b3包括镜头8和位于镜头8后方的图像传感器9,可以直接对镜框平面轮廓6成像。如图4所示,wf为镜框最宽尺寸。wh为镜框扫描仪距离被测镜框一定距离l时,当光学系统在满足应用的最小视场角fov时,光学系统在通光孔1处的最大视场范围。wh随距离l,图像传感器9的感光面大小和光学系统的fov变化而变化。当wh小于或等于通光孔1宽度时,只需要拍照系统a就可以完成镜框平面轮廓6和镜框内槽5的3d测量。当wh大于通光孔1宽度时,只需要拍照系统b来完成镜框平面轮廓6和拍照系统a来进行镜框内槽5的3d测量。通光孔1通过不同的形状和尺寸,可以起到让光全部通过,或部分光被阻挡通过的作用。通光孔1的形状和大小相关于光学系统的视场角,图像传感器9的感光面积大小,通光孔1和镜框拍照系统的距离,及镜框的大小。即当通光孔1的宽度/直径大于或等于图4中的宽度wh时,光学系统a,既可以一次拍全镜框的平面轮廓,又可以在拍镜框内槽5时,通光孔1wh口径可以限制拍照系统只能拍部分的镜框内槽5,从而可以让得到的图像有1个或2个非常锋利的边缘特征,用于图像处理得到潜望臂2的旋转角度。扫描仪仅包括拍照光学系统a,通过拍照光学系统a分别拍摄镜框内槽5形状和镜框平面轮廓6数据;当通光孔1的宽度/直径小于图4中的宽度wh时,扫描仪包括拍照光学系统a和拍照光学系统b 3,通过拍照光学系统a拍摄镜框内槽5形状,通过拍照光学系统b 3拍摄镜框平面轮廓数据。
40.实用新型原理:
41.拍照测量已经是一种成熟的技术,已经应用于许多场合。对于立体或有深度的拍照测量系统,通常采用物方远心或物方/像方双远心的光学系统,这些系统测量时物体不会因为物距的变化而导致测量误差。但是这些系统往往体积大,造价一般在千元以上。常规的非远心光学系统用于测量时,往往像高和物距相关,得到的测量数据需要校准才能反映真实的尺寸,但是这样的光学系统便宜,且体积小。唯一的缺点是需要其他量具来校准数据。考虑到眼镜店一般都有游标卡尺,其0.02mm的精度已经适合镜片装配的要求。因此,可以采用非远心光路测量镜框数据。
42.如图2a,采用一个视场角为6度的手机相机模组,直接单次拍照,图像处理后,用游标卡尺实际测量一下镜框数据宽度w和高度hv值,如图5所示,经过数据标定后得到真实的镜框平面轮廓6数据(ρ,θ)数据,实测的测量精度是0.03mm。当然也可以如图2b所示,用拍照光学系统a直接拍摄。
43.图3a是镜框内槽5的360度旋转扫描拍照示意图,和上述一样,通常采用非远心的光学测量系统。但是由于镜框的最窄边可以小到18mm,如果直接采用图3b的镜头8拍照,有2个明显的缺点:一是需要像质非常好的镜头8,否则因为焦距短,视场角大引起的畸变就非常大,同时镜头8也将非常昂贵。二是镜头8扫描时得到的图纸需要额外增加一个编码器11
旋转角度测量机构。因此图3a的方案比图3b更优。
44.本实用新型的非编码器11光学系统的镜框扫描仪方案中,拍照光学系统a创造性地引用一个让光轴转向角度优选为80-100度的光轴偏转器件7,光轴偏转器件7可以是斜放的反射镜,也可以是棱镜的全内光轴偏转器件7,光轴偏转器件7可以是平面,也可以是弧面。
45.选用45度放置的平面光轴偏转器件7后,光轴偏转器件7前有通光孔1,相当于构成一个潜望系统,增加了物距,减少了视场角,降低了对光学系统的设计难度。选用在直角棱镜反射面上镀膜的方法得到45度放置的平面光轴偏转器件7,当这个棱镜带着通光孔1绕相机的光轴旋转时,可以得到一系列的镜框内槽5图像。如图5所示。通光孔1选用3mm宽,12mm长。通光孔1起到限制视场的作用,得到的图像有2个锋利的边,这个边平行于光轴,边的方位就可以作为潜望臂2旋转时角度姿态的定位依据,如图6所示的θ。通过手动旋转潜望臂2,通过图像分析,θ在(0,360度)范围内变化,这样可以通过拟合来得到内槽的(θ,z)数据。同样,这个镜框内槽5的尺寸数据也需要通过实际测量镜框槽宽wi和wo来标定,图7所示。测量的数据标定后就是真实测量(θ,z)数据。
46.选用通光孔1作为视场的限制优于对光轴偏转器件7的口径来限制,后者会因为多余的进入机身4而引入杂散光。
47.为了简化计算,假定镜框是直径57.3mm的圆形,其圆周尺寸约为180mm。如果选0.5mm作为一个采样点,就需要360个图像才能完成拼接出镜框内槽5的完整图像。如果选用帧屏为30hz的图像传感器9,那么12秒钟内就可以完成测试,对于这个测试时间,本领域技术人员认为是效果显著的。
48.融合2维(ρ,θ)和两维(θ,z)数据,加上实际测得的槽深d和已知的槽的形状,一举可以得到镜框内槽5的弧面的(ρ,θ,z)的3d数据。
49.下面结合说明书附图,通过具体实施例对本实用新型的技术方案作进一步地说明,该实施例以非编码器11光学系统的镜框扫描仪为例子说明本实用新型的技术方案。
50.本实施例中的拍照光学系统b 3镜框平面轮廓6拍照系统采用常规的手机相机模组,可以拍摄镜框平面轮廓6得到(ρ,θ)格式的镜框平面轮廓6数据。拍照光学系统a为镜框内槽5的360度旋转扫描拍照系统,包括通光孔1、光轴偏转器件7、光学镜头8、图像传感器9和数据处理板10。图像传感器9位移成像镜头8后方,且成像面垂直于成像系统的光轴。图像传感器9一般为ccd或cmos相机等可以获得镜框平面图像的光电传感器。数据处理板10,用于收集上述图像传感器9收集的图像数据,打包上传到外设图像处理单元;或对得到的镜框平面轮廓6图像处理可以得到镜框轮廓的平面(ρ,θ)数据。或对360度范围内采用的镜框内槽5弧面图像处理,得到镜框内槽5形状和弧面的(θ,z)数据,融合两者数据生成镜框(ρ,θ,z)的oma文件。
51.光轴偏转器件7安装在一个可以绕图像传感器9垂直法线的潜望臂2内,入射的光线经光轴偏转器件7后通过镜头8将镜框内槽5成像于图像传感器9上。
52.图像处理板直接选用功能强大的智能手机主板。相机模组通过mipi连接到智能手机主板上。由智能主板在软件控制下完成图像处理和数据外传。图像传感器9选用ov公司的1/3.1”的1000万像素的图像传感器9。为方便后续图像处理,相机模组的接口为mipi。
53.光学成像镜头8可以和图像传感器9固定一体,形成相机模组。相机模组可以采用
智能手机的相机模组,镜头8选用规格为:有效焦距30.6mm,视场角为10.3
°
。
54.数据处理板10可以直接采用智能手机的主板。
55.拍照光学系统a中的光轴偏转器件7可以360度旋转扫描,当360度旋转扫描时,所成的像在图像传感器9上也跟踪旋转,相当于360度范围内分段沿镜框内槽5旋转拍摄内槽,通过图像拼接得到两维(θ,z)数据。融合(ρ,θ)和(θ,z)数据,就可以得到(ρ,θ,z)的3d镜框内槽5数据。结合镜框内槽5的截面形状,如图8所示,就可以得到完整镜框的3d形状。
56.使用方法:
57.操作人员在被测镜框放置在一照明良好的桌面上,在桌面上放置一黑色绒布,将被测镜框放置在绒布上,调整镜框的姿态,使得镜框垂直于桌面。将镜框扫描仪放置在离镜框大约600mm的位置,并位于镜框的中心线上,如图2所示。按下拍照按钮,得到镜框平面轮廓图像。这时用游标卡尺测量实际的w和hv值,并输入到软件中校准镜框数据,得到实际测量镜框平面轮廓6的(ρ,θ)数据,如图5所示。
58.将镜框扫描仪的潜望臂2伸入镜框内槽5,如图3a所示。将通光孔1居中于镜框内槽5,相对居中。按下拍照按钮,并用手缓慢旋转安装有光轴偏转器件7的潜望臂2,确保在不少于12秒的时间内,均匀地旋转圆筒,至少旋转360度。然后把得到的一系列的图像进行拟合,可以得到镜框内槽5的(θ,z)数据。这时用游标卡尺测量槽宽wo和wi实际值,如图7所示,进行数据标定和修正。融合两维镜框平面轮廓6数据(ρ,θ)和内槽(θ,z)数据,加上实际测得的槽深d和已知的槽的形状,一举可以得到镜框内槽5的弧面的(ρ,θ,z)数据。标定后的镜框的典型3d图,如图8所示。
59.本实用新型为了保证性能,采用的是独立的两套摄像系统,一套用于镜框平面轮廓6拍照,另一套用于镜框内槽5的360度旋转拍照。同样的,也可以采用一套相同的摄像系统分别进行镜框平面轮廓6拍照和镜框内槽5的360旋转拍照。也就是说,让用于镜框内槽5的360度旋转拍照的系统兼作镜框平面轮廓6的拍照,这时潜望臂2不需要旋转。
60.以上所述的仅是本实用新型的优选实施方式,应当指出,对于本技术领域中的普通技术人员来说,在不脱离本实用新型核心技术特征的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1