一种对焦马达以及摄像模组的制作方法
1.本实用新型涉及拍摄设备技术领域,尤其是涉及一种对焦马达以及摄像模组。
背景技术:
2.对焦马达一般应用于拍摄设备中,其可驱动镜头移动,以实现镜头对焦。为了实现精准快速地对焦,对焦马达的处理单元在镜头移动过程中需要实时采集镜头的位置信息,当镜头位置信息达到预设值时,对焦马达停止驱动镜头移动,此时镜头位于对焦位置。传统的对焦马达一般采用霍尔传感器来实时获取镜头位置信息,然而霍尔传感器其零件较多,结构较为复杂,这样会增加对焦马达的装配难度。
3.为了简化对焦马达的结构,现在也有部分厂商采用可相对移动的电极板来作为感应镜头位置的组件,其原理为:两个电极板相对移动过程中,两个电极板正对的面积发生持续变化,这样使两个电极板之间的电容发生持续变化,电容变化过程对应着镜头位置变化过程。借由这样的方式可以通过实时电容数值来判断镜头的实时位置。然而,在这样的方案中,两电极板正对面积的变化速度较快,不利于精准有效地获取镜头位置信息。为此,有必要提供一种可精准有效地获取镜头实时位置信息的对焦马达技术方案。
技术实现要素:
4.本实用新型提出一种对焦马达以及摄像模组,其有必要提供一种可精准有效地获取镜头实时位置信息的对焦马达技术方案。
5.本实用新型采用的技术方案如下:
6.一种对焦马达,其应用于摄像模组,其包括电容组件、处理单元、定子部件、动子部件以及驱动组件;驱动组件驱动动子部件相对定子部件作直线往复移动;处理单元控制驱动组件工作;电容组件包括相对且间隔设置的第一极板和第二极板,第一极板和第二极板分别与处理单元电连接;第一极板包括第一平面壁,第二极板包括与第一平面壁相对且呈夹角地设置的第二侧壁;第二侧壁在第一平面壁所在平面形成的正投影至少部分位于第一平面壁上,且该部分的面积为s;第二侧壁和第一平面壁的最短距离为d;借由动子部件可驱使第一极板和第二极板在动子部件的移动方向上发生保持s不变而d持续变化的相对移动。
7.在一实施方式中,第二侧壁平行于动子部件的移动方向;第一平面壁在动子部件的移动方向上的长度大于第二平面壁在动子部件的移动方向上的长度。
8.在一实施方式中,第一极板设于动子部件,第二极板设于定子部件,借由动子部驱使第一极板相对于第二极板进行移动。
9.在一实施方式中,第一极板设于定子部件,第二极板设于动子部件,借由动子部驱使第二极板相对于第一极板进行移动。
10.在一实施方式中,第二侧壁为第二平面壁。
11.在一实施方式中,第二侧壁为曲面壁。
12.在一实施方式中,电容组件的配置数量为多个,各电容组件围绕定子部件设置。
13.一种摄像模组,包括壳体、镜头以及上述的对焦马达;定子部件设于壳体内,动子部件可移动地设于壳体内,镜头设于动子部件。
14.本实用新型的有益效果是:
15.本技术的电容组件包括第一极板和第二极板,第一极板包括第一平面壁,第二极板包括与第一平面壁相对且呈夹角地设置的第二平面壁。第二平面壁在第一平面壁所在平面形成的正投影至少部分位于第一平面壁上,且该部分的面积为s。第二平面壁和第一平面壁的距离为d。借由动子部件驱使第一极板和第二极板在动子部件的移动方向上发生保持s不变而d持续变化的相对移动,在该移动过程中,因为s保持不变,所以d变化过程对应着第一极板和第二极板之间的电容变化过程,电容变化过程对应着动子部件的移动过程,处理单元可以通过实时获取电容变化信号来获取动子部件实时的位置信息。由于动子部件用于运载镜头,因而处理单元最终可通过实时获取电容变化信号来实时获取镜头的位置信息。由于本技术的第一平面壁和第二平面壁呈夹角设置,第一平面壁和第二平面壁发生相对移动时,第一平面壁和第二平面壁的距离变化较为缓慢,有利于更加精准有效地实时获取第一平面壁和第二平面壁之间的电容变化信息,从而精准有效地获取镜头的位置信息。
附图说明
16.附图是用来提供对本实用新型的进一步理解,并构成说明书的一部分,与下面的具体实施方式一起用于解释本实用新型,但不应构成对本实用新型的限制。在附图中,
17.图1为本实用新型实施例的摄像模组的结构示意图;
18.图2为本实用新型实施例的摄像模组的组合结构示意图;
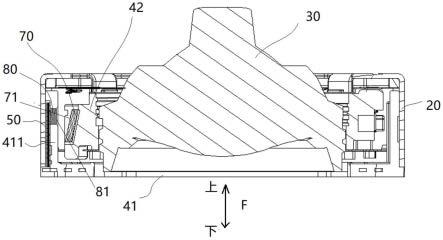
19.图3为本实用新型实施例的摄像模组的剖面结构示意图;
20.图4为本实用新型实施例的摄像模组在没有装配第一极板和第二极板时的剖面结构示意图;
21.图5为本实用新型实施例的第一极板和第二极板的位置关系示意图;
22.图6为本实用新型实施例的第二平面壁在第一平面壁所在平面上形成投影的位置示意图;
23.图7为本实用新型实施例的第二平面壁在第一平面壁所在平面上形成投影的位置示意图;
24.图8为本实用新型实施例的第二平面壁在第一平面壁所在平面上形成投影的位置示意图;
25.图9为本实用新型实施例的第一极板、第二极板、马达载体以及竖板的位置关系示意图。
26.附图标注说明:
27.10、摄像模组;
28.20、壳体;
29.30、镜头;
30.41、底板;411、竖板;4111、第二装配槽;412、连接柱;42、马达载体;421、第一装配槽;43、马达支架;44、上弹片;45、下弹片;
31.50、处理单元;
32.60、磁铁;
33.70、第一极板;71、第一平面壁;
34.80、第二极板;81、第二平面壁。
具体实施方式
35.以下结合附图对本实用新型的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本实用新型,并不用于限制本实用新型。
36.请参阅图1,本实施例公开一种摄像模组10,其可用于拍摄设备,例如手机、无人机、单反相机等。摄像模组10包括壳体20、镜头30以及对焦马达。壳体20的底侧敞开,壳体20的顶侧设有用以与镜头30配合的缺口。
37.请参阅图2和图3,对焦马达包括定子部件、动子部件、驱动组件、电容组件以及处理单元50。定子部件设于壳体20内,动子部件可移动地设于壳体20内,驱动组件驱动动子部件相对定子部件作直线往复移动,具体的,动子部件在图中的f方向上往复移动;镜头30设于动子部件,借由动子部件驱动镜头30移动。
38.具体的,定子部件包括底板41,底板41相对两侧分别设有一竖板411;底板41固接于壳体20的底侧,竖板411位于壳体20内。动子部件包括马达支架43、马达载体42、上弹片44以及下弹片45。马达支架43设于壳体20内,马达支架43靠近底板41的一侧设有四个分布在马达支架43四个角落的支撑脚,马达支架43的支撑脚抵接底板41,马达支架43背向底板41的侧面抵接壳体20的缺口内壁。马达载体42设于壳体20内,马达载体42上侧通过上弹片44连接在马达支架43背向缺口的一侧,马达载体42的下侧通过下弹片45连接在底板41,其中,马达载体42的上侧和下侧是指图2中的f方向的上下两侧,即马达载体42朝向底板41的一侧为马达载体42的下侧,马达载体42背向底板41的一侧为马达载体的上侧。进一步的,底板41朝向下弹片35的一侧设有连接柱412,下弹片45设有穿插孔(图中未显示),连接柱412贯穿下弹片45的穿插孔。下弹片45通过铆接或粘接或其他可行的连接方式固接在连接柱。在本实施例中,下弹片45构成对焦马达的定子,对焦马达工作时,马达载体42沿f方向发生移动,马达载体42带动下弹片45发生弹性形变,当对焦马达停止工作时,下弹片45的弹性力迫使马达载体42恢复原状。
39.驱动组件包括两分别设于壳体20相对的两内侧壁的磁铁60以及设在马达载体42上的线圈,当线圈通电时,磁铁60可通过磁力推动线圈,从而由线圈推动马达载体42沿直线方向往复移动。具体的,线圈推动马达载体42沿图中f方向往复移动。镜头30设在马达载体42上,由马达载体42驱动镜头30沿直线往复移动,从而完成镜头30对焦。
40.在本实施例中,处理单元50设在其中一竖板411的外侧,处理单元50可以为fpcb(flexible printed circuit board)处理单元50,fpcb处理单元50也称柔性电路板处理单元50,其处理器设在柔性电路板上。fpcb处理单元50由于其具备柔性,因而适配于镜头30模组的小空间安装场景。在其他实施例中,处理单元50还可以是其他微处理器单元。本实施例的处理单元50可控制驱动组件工作,使驱动组件驱使马达载体42沿直线往复移动或使驱动组件停止驱动马达载体42。
41.在本实施例中,电容组件的配置数量为一个,在其他实施例中,电容组件的配置数量可以为多个,例如为四个,四个电容组件围绕马达载体42等间距设置。
42.请参阅图3,在本实施例中,电容组件包括相对且间隔设置的第一极板70和第二极板80。第一极板70和第二极板80分别与处理单元50电连接,当第一极板70和第二极板80接通电源时,第一极板70和第二极板80之间形成电容(亦称电容量),其形成电容的原理为现有技术,因而在此不再阐述。第一极板70设于动子部件,第二极板80设于定子部件,借由动子部驱使第一极板70相对于第二极板80进行移动。在其他实施例(如图9所示)中,第一极板70也可以设在定子部件,而第二极板80设在动子部件。
43.在本实施例中,第一极板70设在马达载体42的外周侧壁。第二极板80设于其中一竖板411,第二极板80与第一极板70相对且间隔。优选的,第二极板80与处理单元50设于同一竖板411,这样使对焦马达的结构更加紧凑。当然,在其他实施例中,第二极板80也可以设在另一竖板411或壳体20内的其他位置。
44.请参阅图4,图4显示了图3中的摄像模组10在没有装配第一极板70和第二极板80时的结构。在本实施例中,马达载体42的外周侧壁开设有第一装配槽421,第一极板70装配于第一装配槽421。竖板411开设有第二装配槽4111,第二极板80装配在第二装配槽4111。优选的,第一装配槽421与自身槽口相对的槽壁呈倾斜地设置,当第一极板70装配至第一装配槽421后,第一极板70也呈倾斜地设置。当然,在其他实施例中,第一极板70和第二极板80还可以采用其他方式来进行安装。
45.现有技术中,有部分镜头30模组的电容组件的两极板通过焊接或粘接方式安装在其他板件上,在安装两极板时,需要调整两极板的位置关系和角度关系,安装过程较为复杂。而本实施例在装配时,只需将第一极板70和第二极板80分别嵌合在第一装配槽421和第二装配槽4111即可,第一极板70和第二极板80的位置关系以及角度关系分别由第一装配槽421和第二装配槽4111自行限定,因而无需再调整第一极板70和第二极板80之间的位置关系和角度关系,这样可使第一极板70和第二极板80的装配过程较为简单快捷。
46.请继续参阅图3,在本实施例中,第一极板70包括第一平面壁71,第二极板80包括与第一平面壁71相对且呈夹角地设置的第二侧壁,具体的,第一平面壁71形成在第一极板70靠近第二极板80的侧面上,第二侧壁形成在第二极板80靠近第一极板70的侧面上。
47.其中,第二侧壁为第二平面壁81。第二平面壁81在第一平面壁71所在平面形成的正投影至少部分位于第一平面壁71上,且该部分的面积为s。请结合图5和图6,图5显示了第一平面壁71和第二平面壁81的相对位置,以及显示了第二平面壁81在第一平面壁71所在平面上形成正投影的原理;图6显示了第二平面壁81在第一平面壁71所在平面上形成的正投影与第一平面壁71的位置关系。本实施例所述的正投影是指光线从垂直第二平面壁81的e方向照射第二平面壁81所形成的投影。本实施例的第二平面壁81在第一平面壁71所在平面形成的正投影全部位于第一平面壁71上,也即第二平面壁81在第一平面壁71所在平面上形成的正投影的面积为s,该正投影对应图中的a部位,在第一平面壁71和第二平面壁81沿图中f方向发生相对移动时,a部位的面积保持不变。
48.在其他实施例中(未图示),第二侧壁还可以为曲面壁,只要让曲面壁在第一平面壁71所在平面形成的正投影至少部分位于第一平面壁71上即可,该部分的面积为s,曲面壁与第一平面壁71沿f方向相对移动时,也可保持s面积不变。
49.示例性的,在其他实施例中,请参阅图5和图7,第二平面壁81在第一平面壁71所在平面上形成的正投影的中间部分位于第一平面壁71上,该部分对应图7中的b部位。在第一
平面壁71和第二平面壁81沿图中f2方向发生相对移动时,b部位的面积保持不变。请参阅图8,在另一其他实施例中,第二平面壁81在第一平面壁71所在平面形成的正投影的其中一侧位于第一平面壁71重叠,该侧为图7中的c部位,在第一平面壁71和第二平面壁81沿图中f3方向发生相对移动时,c部位的面积保持不变。当然,还存在其他实施例也适用于本技术,在此不一一穷举。
50.请继续参阅图5,第二平面壁81和第一平面壁71的距离为d,其中,第一平面壁71和第二平面壁81的距离指第一平面壁71和第二平面壁81之间的最短距离;例如,第二平面壁81的最下侧为测量参考点,第二平面壁81最下侧与第一平面壁71之间的最短距离为d。
51.在本实施例中,借由动子部件可驱使第一极板70和第二极板80在动子部件的移动方向上发生保持s不变而d持续变化的相对移动。具体的,在第一极板70和第二极板80相对移动的过程中,始终保持第一平面壁71和第二平面壁81的夹角角度不变,这样即可保持s不变。在第一极板70和第二极板80相对移动过程中,因为s保持不变,所以d变化过程对应着第一极板70和第二极板80之间的电容变化过程,电容变化过程对应着动子部件的移动过程,不同的电容对应着动子部件位于不同位置,因而,处理单元50根据第一极板70和第二极板80之间的电容变化来获取动子部件的实时位置信息。具体的,电容的计算公式为c=εs/4πkd。其中,ε是介电常数,s为第二平面壁81在第一平面壁71上形成的正投影面积,d为第一平面壁71和第二平面壁81的距离,k则是静电力常量。当第一平面壁71和第二平面壁81发生相对移动时,s值保持不变,d值持续变化,因而c的值会根据第一平面壁71和第二平面壁81相对移动的过程而发生适应性变化。当动子部件移动到预设位置时,第一平面壁71和第二平面壁81处于预设的相对位置,第一极板70和第二极板80之间的电容也处于预设数值。对焦过程中,处理单元50实时采集第一极板70和第二极板80之间的电容(也即c数值),当第一极板70和第二极板80之间的电容达到预设数值时,处理单元50控制驱动组件,使驱动组件停止驱动动子部件,此时动子部件停留在预设位置,动子部件所运载的镜头30也处于对焦位置。
52.由于本技术的第一平面壁71和第二平面壁81呈夹角设置,第一平面壁71和第二平面壁81发生相对移动时,第一平面壁71和第二平面壁81的距离变化较为缓慢,有利于更加精准有效地实时获取第一平面壁71和第二平面壁81之间的电容变化信息,从而精准有效地获取镜头的位置信息。
53.请继续参阅图3,第一极板70的截面形状可以是梯形、三角形、长方形、平行四边形等形状,在此不对第一极板70的形状结构做出限定,只要其表面能够形成第一平面壁71即可,此外,对于第二极板80而言也是如此,只要其表面能够形成第二平面壁81即可。例如,在本实施例中,第一极板70沿动子部件移动方向的截面形状为平行四边形,第二极板80沿动子部件移动方向的截面形状为长方形。
54.为了实现第一极板70和第二极板80相对移动过程中保持第一平面壁71和第二平面壁81的夹角不变而第一平面壁71和第二平面壁81的距离d持续改变,本实施例采用以下方案:
55.请继续参阅图3,在本实施例中,马达载体42可在图3中f方向上往复移动,动子部件的移动方向和马达载体42的移动方向一致。第二平面壁81平行于动子部件的移动方向,动子部件的移动方向为f方向。第一平面壁71在动子部件移动方向上的长度大于第二平面
壁81在动子部件移动方向上的长度。具体的,第一平面壁71在动子部件的移动方向上所跨越的距离大于第二平面壁81在动子部件的移动方向上所跨越的距离。第一平面壁71在f方向上所跨越的距离为l1,第二平面壁81在f方向上跨越的距离为l2,l1大于l2。在实际应用场景中,只要让第二平面壁81和第一平面壁71在f方向上相对移动的距离位于l1数值范围内,这样即可以让第二平面壁81和第一平面壁71在f方向上相对移动过程中保持a部位面积不变。借由这样的结构方式,可以使第二平面壁81和第一平面壁71可以拥有足够的移动距离,从而使第一电极板79和第二电极板80之间的电容变化范围足够广泛。
56.进一步的,第二平面壁81平行于马达载体42的移动方向,第一平面壁71由上至下地朝向第二平面壁81倾斜,在其他实施例中,第一平面壁71也可以由下至上地朝向第二平面壁81倾斜;当第一极板70由下往上移动时,第一平面壁71和第二平面壁81的距离d逐渐变小,当第一极板70由上往下移动时,第一平面壁71和第二平面壁81的距离d逐渐变大;在前述过程中,形成在第一极板70和第二极板80之间的电容可根据d变化而进行适应性变化,处理单元50持续采集第一极板70和第二极板80之间的电容信号,并且根据电容信号来控制驱动组件工作。在其他实施例中,第二平面壁81也可以与动子部件的移动方向夹角设置,只要能够实现在第一极板70和第二极板80相对移动过程中保持第一平面壁71和第二平面壁81的夹角角度不变即可,也即保持图5中a的角度数值不变。
57.在现有技术中,电容组件的两极板为相互平行的,在对焦马达驱动镜头时,其中一极板与镜头一起移动,而另一极板保持不动,从而使两极板发生相对移动。其中一方案中,两极板相对移动的方向为平行于极板板面方向,这样是通过保持两极板距离不变而改变两极板正对面积的方法来改变两级板电容。另一方案中,两极板相对移动方向还可以为垂直极板板面的方向,这样是通过保持两极板正对面积不变而改变两极板距离的方法来改变两级板电容。然而,在现有技术中,无论采用前述的哪种方式,极板移动的速度都与镜头移动的速度是一致的,因而其都存在因极板速度变化较快而导致两极板电容变化较快的缺点,不利于处理单元采集电容信号。
58.与现有技术相比,本实施例的第一极板70和第二极板80为非平行排布,且第一平面壁71和第二平面壁81夹角设置;马达载体42带动镜头30移动过程中,马达载体42也一并带动第一极板70移动,而第二极板80保持不动,这样即可使第一极板70和第二极板80发生相对移动;在第一极板70和第二极板80进行相对移动过程中,动子部件移动方向与第二平面壁81平行,第一平面壁71和第二平面壁81为夹角设置,第一平面壁71在动子部件的移动方向上所跨越的距离大于第二平面壁81在动子部件的移动方向上所跨越的距离;基于前述的结构特征,使第一平面壁71与第二平面壁81的距离变化速度小于第一极板70的移动速度,也即小于镜头30移动速度,因而,相对而言,第一平面壁71和第二平面壁81距离变化速度较为平缓,这样使第一极板70和第二极板80的电容变化也较为平缓,便于处理单元50采集电容变化信号以及处理该信号,借由此可以在一定程度上提高处理单元50采集电容变化信号、处理电容变化信号以及根据电容变化信号控制驱动组件等过程的精准度。
59.只要不违背本实用新型创造的思想,对本实用新型的各种不同实施例进行任意组合,均应当视为本实用新型公开的内容;在本实用新型的技术构思范围内,对技术方案进行多种简单的变型及不同实施例进行的不违背本实用新型创造的思想的任意组合,均应在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1