一种矿下探测超远距离机器人的制作方法
1.本实用新型属于机器人技术领域,具体涉及一种矿下探测超远距离机器人。
背景技术:
2.矿内环境异常恶劣,巷道弯曲多起伏,空气中充斥各种有毒有害气体。当矿内发生事故时,重新建立通信,将内部信息采集并传出是非常困难的。目前几乎所有的国家矿山应急救援大队均采用人工布置基站,救援人员采用手持传感器和对讲系统的方式,进入矿内投放通信基站,对救援人员的安全造成极大危险。现有的基站大部分采用无线wifi模式,通信距离近,并且存在一定的延时。
3.申请公布号为cn 113387129 a的发明专利公开了一种防爆型基站抛投装置,通过同步带实现基站的抛投,通讯距离最多可延长至3000米范围内,受制于防爆和能量的限制,无线信号传输距离、稳定性和即时性有限。
技术实现要素:
4.本实用新型的目的在于提供一种既能保证超远距离组网通信又能避免延时的矿下探测超远距离机器人。
5.本实用新型解决其技术问题所采用的技术方案是:一种矿下探测超远距离机器人,包括车体,与车体无线连接的手持遥控终端,安装于车体上且对称设置的两组固定支架,设置于两组固定支架之间且固定安装于车体上的气体传感器,安装于车体前端的前全景摄像头,安装于固定支架顶部的后视摄像头。所述车体内设有一组通信基站,手持遥控终端内设有一组通信基站,每组固定支架的底部沿车体前进方向并排放置有若干通信基站,固定支架的中部水平设有投放机构移动组件,固定支架上还设有投放机构,投放机构能够沿投放机构移动组件前后移动,投放机构用于勾取固定支架上的通信基站并投放至地面。
6.进一步地,所述投放机构包括投放电机、投放台、垂直滚珠丝杠、第二滚珠丝杠副、吊杆,投放台的顶部和底部均安装有连接板,连接板的两侧均设有滚轮,投放电机固定于投放台顶部的连接板上,投放电机的输出轴连接垂直滚珠丝杠,吊杆竖直设置且与垂直滚珠丝杠平行,第二滚珠丝杠副装配于垂直滚珠丝杠上并与吊杆固定连接,吊杆的底部设有t型吊钩,t型吊钩用于勾取通信基站,投放电机驱动垂直滚珠丝杠旋转,进而带动吊杆和t型吊钩上下移动。
7.进一步地,所述投放机构移动组件包括投放台移动电机、水平滚珠丝杠、第一滚珠丝杠副,投放台移动电机水平固定于固定支架前端的中部,投放台移动电机的输出轴与水平滚珠丝杠连接,水平滚珠丝杠沿车体方向延伸至固定支架的后端,第一滚珠丝杠副装配于水平滚珠丝杠上并固定于投放台上,投放台移动电机驱动水平滚珠丝杠旋转,带动投放台沿水平方向前后移动。
8.进一步地,所述固定支架的顶部设有上横梁,中部设有支撑横梁,上横梁与支撑横梁的内侧均设有滑轨,投放台顶部连接板上的滚轮位于上横梁内侧的滑轨内,投放台底部
连接板上的滚轮位于支撑横梁内侧的滑轨内,滚轮能沿滑轨前后移动。
9.进一步地,所述固定支架上的通信基站位于t型吊钩移动方向的正下方,通信基站的顶部设有用于t型吊钩勾取的提手,提手两侧设有基站天线,每组固定支架上设置十组通信基站。车载二十组通信基站,车体内一组,遥控终端内一组,可以22组通信基站自组网。
10.进一步地,两组所述固定支架的顶部之间连接有连杆,后视摄像头固定安装于连杆上。
11.进一步地,所述固定支架的顶部设有用于与遥控终端以及通信基站无线通信的天线,固定支架的顶部设有坦克拖链。
12.进一步地,所述通信基站本安设计,体积小,重量轻,频宽110mhz,带宽100mbps,两通信基站间无线点对点传输距离300米;遥控终端本安设计,集数据、图像、语音于一体,能录制视频存储,能够根据后台信号强度判断是否投放基站。
13.进一步地,所述车体内设有倾角传感器,倾角传感器与后视摄像头配合使用。
14.进一步地,所述气体传感器用于检测co、co2、no、no2、ch4、o2六种气体。
15.本实用新型具有以下有益效果:本实用新型的机器人通过投放电机和投放台移动电机联动,实现固定支架上通信基站的自动投放,可以实现22个通信基站自组网,具备高带宽、低延时的特点,机器人的通信传输距离可达6300米,实现超远距离组网通讯,且传输信号稳定快速,在保证超远距离通信的同时,避免了延时。
附图说明
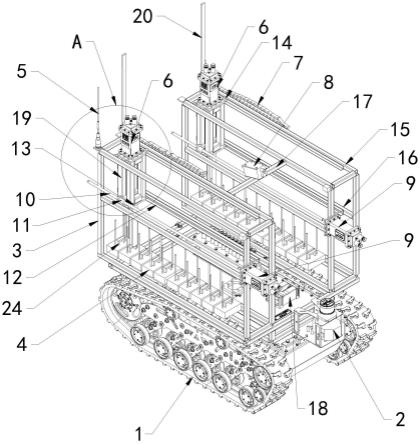
16.图1是本实用新型机器人的立体结构示意图。
17.图2是图1中a部分局部放大图。
18.图3是本实用新型机器人的左视图。
19.图4是本实用新型机器人的主视图。
20.图5是本实用新型机器人的俯视图。
21.图中,1、车体,2、前全景摄像头,3、固定支架,4、通信基站,5、天线,6、投放电机,7、坦克拖链,8、后视摄像头,9、投放台移动电机,10、水平滚珠丝杠,11、第一滚珠丝杠副,12、滑轨,13、连接板,14、滚轮,15、上横梁,16、支撑横梁,17、连杆,18、气体传感器,19、投放台,20、吊杆,21、第二滚珠丝杠副,22、t型吊钩,23、垂直滚珠丝杠,24、提手,25、基站天线。
具体实施方式
22.现在结合附图对本实用新型作进一步详细的说明。
23.如图1所示,一种矿下探测超远距离机器人,包括车体1,与车体1无线连接的手持遥控终端,手持遥控终端在附图中未示出,安装于车体1上且对称设置的两组固定支架3,设置于两组固定支架3之间且固定安装于车体1上的气体传感器18,安装于车体1前端的前全景摄像头2,安装于固定支架3顶部的后视摄像头8。气体传感器18用于检测co、co2、no、no2、ch4、o2六种气体。车体1内设有一组通信基站,手持遥控终端内设有一组通信基站,每组固定支架3的底部沿车体前进方向并排放置有若干通信基站4,固定支架3的中部水平设有投放机构移动组件,固定支架3上还设有投放机构,投放机构能够沿投放机构移动组件前后移动,投放机构用于勾取固定支架3上的通信基站4并投放至地面。
24.投放机构包括投放电机6、投放台19、垂直滚珠丝杠23、第二滚珠丝杠副21、吊杆20,如图2、4所示,投放台19的顶部和底部均安装有连接板13,连接板13的两侧均设有滚轮14,投放电机6固定于投放台19顶部的连接板13上,投放电机6的输出轴连接垂直滚珠丝杠23,吊杆20竖直设置且与垂直滚珠丝杠23平行,第二滚珠丝杠副21装配于垂直滚珠丝杠23上并与吊杆20固定连接,吊杆20的底部设有t型吊钩22,t型吊钩22用于勾取通信基站4,投放电机6驱动垂直滚珠丝杠23旋转,进而带动吊杆20和t型吊钩22上下移动。
25.投放机构移动组件包括投放台移动电机9、水平滚珠丝杠10、第一滚珠丝杠副11,如图2、5所示,投放台移动电机9水平固定于固定支架3前端的中部,投放台移动电机9的输出轴与水平滚珠丝杠10连接,水平滚珠丝杠10沿车体1方向延伸至固定支架3的后端,第一滚珠丝杠副11装配于水平滚珠丝杠10上并固定于投放台19上,投放台移动电机9驱动水平滚珠丝杠10旋转,带动投放台19沿水平方向前后移动。
26.如图2所示,固定支架3的顶部设有上横梁15,中部设有支撑横梁16,上横梁15与支撑横梁16的内侧均设有滑轨12,投放台19顶部连接板13上的滚轮14位于上横梁15内侧的滑轨12内,投放台19底部连接板13上的滚轮14位于支撑横梁16内侧的滑轨12内,滚轮14能沿滑轨12前后移动。
27.如图3所示,固定支架3上的通信基站4位于t型吊钩22移动方向的正下方,通信基站4的顶部设有用于t型吊钩22勾取的提手24,提手两侧设有基站天线25,每组固定支架3上设置十组通信基站4。通信基站本安设计,频宽110mhz,带宽100mbps,无线点对点传输距离300米,车载二十组通信基站,车体内一组,遥控终端内一组,可以22组通信基站自组网,整个传输距离共21
×
300=6300米,具备高带宽、低延时的特点。遥控终端本安设计,重量小于6.4kg,集数据、图像、语音于一体,能录制视频存储,能够根据后台信号强度判断是否投放基站。车体与手持遥控终端之间的无线连接是tdd信号,无线mesh(ofdm)。
28.如图3所示,两组所述固定支架3的顶部之间连接有连杆17,后视摄像头8固定安装于连杆17上。车体1内设有倾角传感器,倾角传感器与后视摄像头8配合使用,用于实时查看控制t型吊钩22勾取通信基站4的提手24进行投放。
29.如图2所示,固定支架3的顶部设有用于与遥控终端以及通信基站4无线通信的天线5。固定支架3的顶部设有坦克拖链7,用于对机器人上的电缆等起到牵引、保护的作用。
30.车体1的行走移动、投放电机6、投放台移动电机9、前全景摄像头2、后视摄像头8、气体传感器18均与遥控终端连接并受遥控终端控制。车体1采用三维激光雷达构图,可自主规划路径,在矿下自主行走、爬坡、越障、避障。本实用新型的车体采用现有技术,可采用授权公告号为cn 210258605 u的实用新型专利公开的高性能自适应履带底盘装置,以及申请公布号为cn 111617414a的发明专利中公开的车体及悬挂组件等。
31.投放基站有2套机构,分别由2个电机完成,分别为车体纵向和垂直方向的运动。机器人前进过程中,遥控终端根据后台信号强度判断是否投放基站。当需要投放通信基站时,投放台移动电机驱动水平滚珠丝杠转动,第一滚珠丝杠副带动投放台水平移动,进而带动吊杆和t型吊钩水平移动。当t型吊钩移动至最靠近车体后端的通信基站上方时,投放电机驱动垂直滚珠丝杠转动,第二滚珠丝杠副带动吊杆竖直向下移动,进而t型吊钩向下移动至通信基站顶部的提手处。此时,投放台移动电机驱动水平滚珠丝杠转动,带动t型吊钩水平移动勾取通信基站的提手,从而实现t型吊钩对通信基站的捕获。通过两个电机联动,已经
勾取通信基站的t型吊钩向车体后方移动,通过倾角传感器结合后视摄像头,将通信基站投放至车体后方的地面上,如此根据需要依次投放固定支架上的通信基站,最多可投放全部20组通信基站,加上车体内及遥控终端内的各一组通信基站,整个传输距离可达21
×
300=6300米,实现超远距离组网通讯,且传输信号稳定快速,在保证超远距离通信的同时,避免了延时。
32.上面所述的实施例仅仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的构思和范围进行限定。在不脱离本实用新型设计构思的前提下,本领域普通人员对本实用新型的技术方案做出的各种变型和改进,均应落入到本实用新型的保护范围。
33.本实用新型未详细描述的技术、形状、构造部分均为公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1