SLAM场景下多机器人系统数据分发吞吐量自适应调整方法
本发明属于云边端融合的机器人系统数据实时传输和协作slam的,涉及一种在应用层根据网络可变性和任务协作性能进行拥塞控制的自适应吞吐量算法。
背景技术:
1、随着边缘计算和5g技术的发展以及云-边-端一体化对机器人系统的支撑,机器人系统的海量数据合理地分布在云-边-端上处理,在云和边缘侧为机器人感知和理解的ai算法提供算力支持,多样性环境下机器人网络通信的稳定性和高效性问题日益突出。
2、同时,多机器人协同利用机器人的相互协作实现更多复杂功能,相比于单个机器人,多机系统具有典型的分布特性,机器人之间相互取长补短,增加了功能的冗余性、系统的容错性以及组织结构的灵活性,在这种情况下所交换的数据量也会成倍增长,对带宽和通信范围有了更高的要求。
3、基于ros2构造终端和网络侧的软件系统架构可以满足云边端融合的多机器人系统的需求,ros2支持多机器人系统和异构平台等,使用通信中间件数据分发服务(dds)解决消息间通信的实时性和去中心化,提供高性能和以数据为中心的发布/订阅服务。然而,用ros2实现的传统多机器人系统通信过程中,并未考虑当机器人所传的传感器数据带宽过大导致网络拥塞的情况以及关键信息的传输问题。
4、相关研究中,将tcp/udp先进的拥塞控制算法迁移到多机器人系统中使用,从而考虑网络的动态变化,调整机器人应用吞吐量,避免网络拥塞,但缺少对机器人当前任务性能考虑和关键信息的区分。
技术实现思路
1、为解决上述现有技术的缺点,本发明提出一种slam场景下多机器人系统数据分发吞吐量自适应调整方法。
2、本发明提出的技术方案是:
3、一种slam场景下多机器人系统数据分发吞吐量自适应调整方法,包括以下步骤:
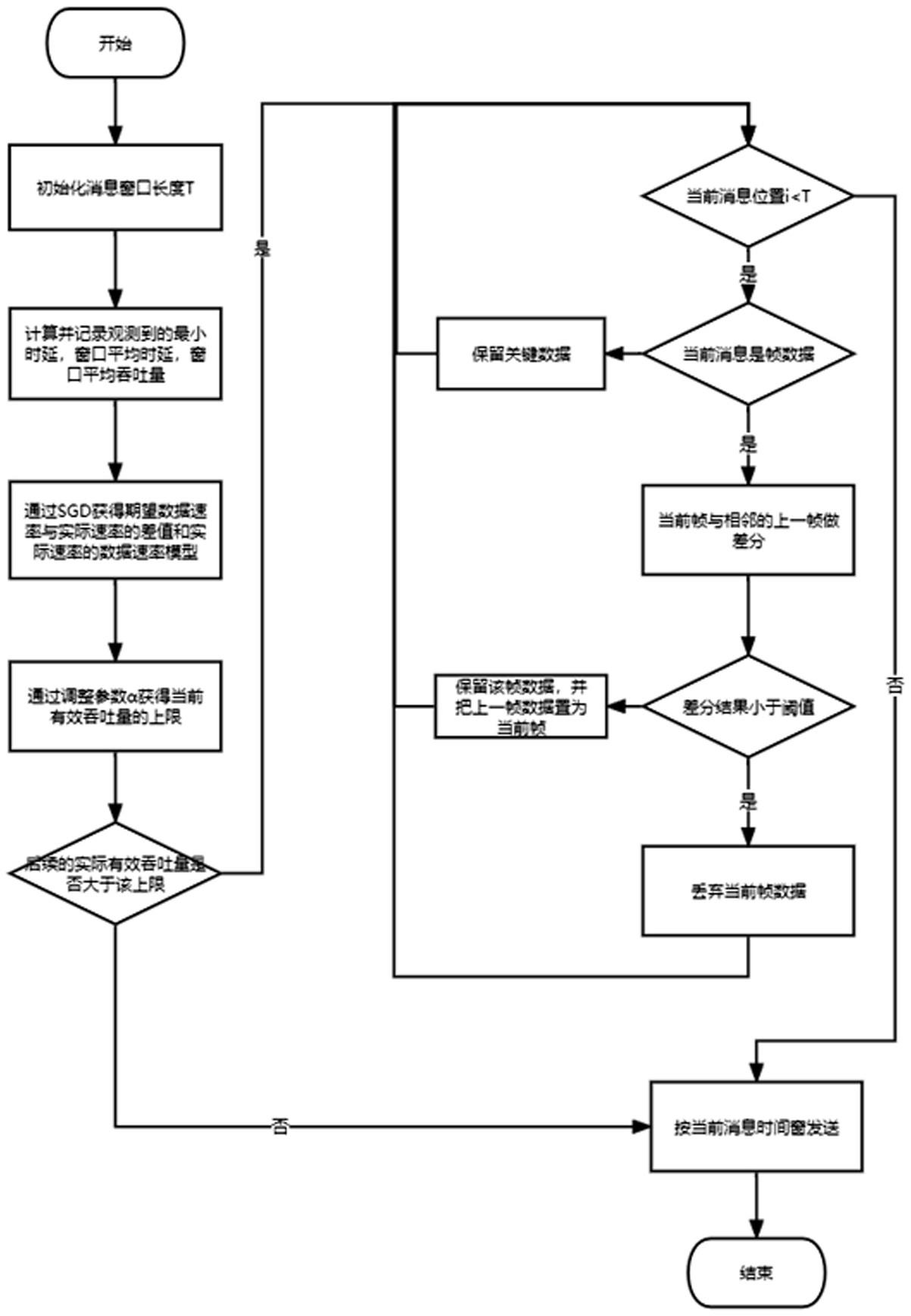
4、步骤一,当多机器人系统进行协作slam传输数据时,初始化消息窗口长度t,记录观测到的最小时延、消息窗口的平均延迟及平均吞吐量;
5、步骤二,计算期望数据速率与实际数据速率的差值,通过在线学习算法和观测的数据,估计出其差值与实际速率之间的数据速率模型,通过数据速率模型和引入的参数α得到有效吞吐量的上限,从而得到自适应吞吐量约束;
6、步骤三,根据消息类型将待发送时间窗中的消息区分为slam图像帧数据与非图像帧数据,非图像帧数据在消息时间窗中予以保留;
7、步骤四,针对slam图像帧数据,通过步骤二中得到的自适应吞吐量约束调整帧发送速率,在待发送时间窗中,对相邻连续的两帧图像做差分并根据多次实验所得的差分阈值判断,若差分结果小于该阈值,丢弃当前帧,否则,在消息时间窗口中保留该图像帧。
8、在可能的一个设计中,步骤三种的非图像帧数据包括但不限于机器人控制指令等关键信息。
9、在可能的一个设计中,步骤二中,在得到自适应吞吐量约束前,可根据观测数据不断调整该数据速率模型。
10、在可能的一个设计中,步骤一中,消息窗函数mwnd(t,m)表示t时刻时正位于长度为t的时间窗口内消息集合m的一个子集,具体表示为:mwndt,m=m∈mt-t≤m.tsent≤t,
11、窗口内实际的平均有效吞吐量|mwnd|g计算公式如下:
12、
13、窗口内平均消息时延|mwnd|d计算公式如下:
14、
15、期望数据速率与实际数据速率的差值|mwnd|δ,表征网络性能,网络延迟增加,|mwnd|δ增大,||mwnd||δ计算公式如下:
16、
17、其中,记录观测到交换消息的最小时延的估计值为δ。
18、在可能的一个设计中,步骤二中,利用在线学习的方法sgd估计|mwnd|δ和发送速率之间的关系模型r,并根据观测值不断调整模型;通过数据速率模型和引入的调整参数α,可以得到自适应吞吐量的上限估计值rt(α),从而可以得到如下自适应吞吐量约束,满足下式:
19、
20、在t时刻使用sgd得到mwndδ和发送速率之间的关系模型rt满足下式:
21、rtmwndδ=|mwnd|g。
22、在可能的一个设计中,判断当前多机器人系统中的吞吐量|mwnd|g和在线学习获得的自适应吞吐量约束rtα大小,若|mwnd|g>rtα,则调整消息的帧速率减低有效吞吐量;否则,不对当前有效吞吐量做降低处理。
23、在可能的一个设计中,步骤二中,在网络不拥塞时,利用在线学习的方法sgd估计|mwnd|δ和发送速率之间的关系模型r。
24、本发明还提供一种slam场景下多机器人系统数据分发吞吐量自适应调整装置,包括存储器、控制处理器及存储在所述存储器上并可在所述控制处理器上运行的计算机程序,所述控制处理器执行所述程序,以实现前述的自适应调整方法。
25、本发明还提供一种控制系统,包括前述的自适应调整装置。
26、本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行前述的自适应调整方法。
27、与现有技术相比,本发明的优点在于:
28、本发明提供了一种slam场景下多机器人系统数据分发中考虑协作性能的吞吐量自适应调整方法,该方法同时考虑了多机器人系统数据分发中网络的可变性和约束传输数据量/发布速率对多机器人系统当前任务的效用影响,通过应用层拥塞控制算法,在带宽受限或者网络拥塞前,减少发送时间窗内对当前任务效用较低的数据,以限制传输数据的数量,从而平滑地适应动态的通信环境,避免网络拥塞,确保多机器人系统中关键信息的送达,同时保证多机器人系统当前任务的协作性能。
29、本发明所述的一种slam场景下多机器人系统数据分发中考虑协作性能的吞吐量自适应调整方法,在多机器人slam协作任务通信过程中,机器人通常可以访问同步时间源并测量到端到端的时延,通过基于延迟的方法在应用层检测拥塞前网络状态;同时使用在线学习算法获得数据速率模型,根据观测数据不断调整模型,通过某一时刻的模型估计该时刻有效吞吐量的上限值,从而获得自适应吞吐量的约束;与此同时,减少发送时间窗内对当前任务效用较低的数据以限制传输数据的数量,由于视觉slam的视觉里程计部分主要针对相邻关键帧进行位姿估计,相邻且相对运动很小(图像相似)的普通帧图像对slam影响较小,故通过帧与帧差分和设置差分阈值,丢弃对slam效用较小的普通帧以缓解传输带宽,进而尽管为了拥塞避免丢失一些数据,也要丢失对当前任务影响较低的数据,尽量保证协作任务的性能和关键信息的传输。
30、综上,本发明提出了综合考虑考虑了多机器人系统数据分发中网络的可变性和约束传输数据量/发布速率对多机器人系统当前任务的效用影响的吞吐量自适应调整方法,在网络正常的环境下,根据机器人当前任务和网络带宽,提高多机器人系统的吞吐量,充分利用网络,提高网络的利用率;在网络带宽受限或者传输带宽超过允许的限制环境下,动态调整机器人应用的吞吐量,减少效用相对较低/冗余的数据量,优先发送对当前任务效用高的数据以及控制指令等关键信息,保证多机器人系统的协作性能和实时性。
- 还没有人留言评论。精彩留言会获得点赞!