一种基于位置信息的视频智能分析方法与流程
本发明涉及视频智能分析领域,涉及到一种基于位置信息的视频智能分析方法。
背景技术:
1、在生产工厂中,视频监控分析技术使用十分普遍,如通过摄像头获取仪器设备的视频信息进而对仪器设备进行监控,但现有的视频监控分析技术仍存在着一些不足之处:1、现有视频监控分析技术通过单个摄像头对单个仪器设备进行一对一式监控,监测多个仪器设备时则使用到多个摄像头,进而造成资源的浪费,同时增大了视频信息接收端的数据传输量,对视频信息接收端的内存和运存都提出更高要求。
2、2、现有视频监控分析技术对仪器设备进行监控时,获取的是仪器设备的全图像,不同仪器设备所需要监控的部位也不同,现有技术没有根据仪器设备重点监控部位所在位置,调整摄像头偏转角度,进而不能获取仪器设备重点监控部位的特写图像,无法对仪器设备进行针对性分析,从而降低仪器设备监测分析结果的精准性。
技术实现思路
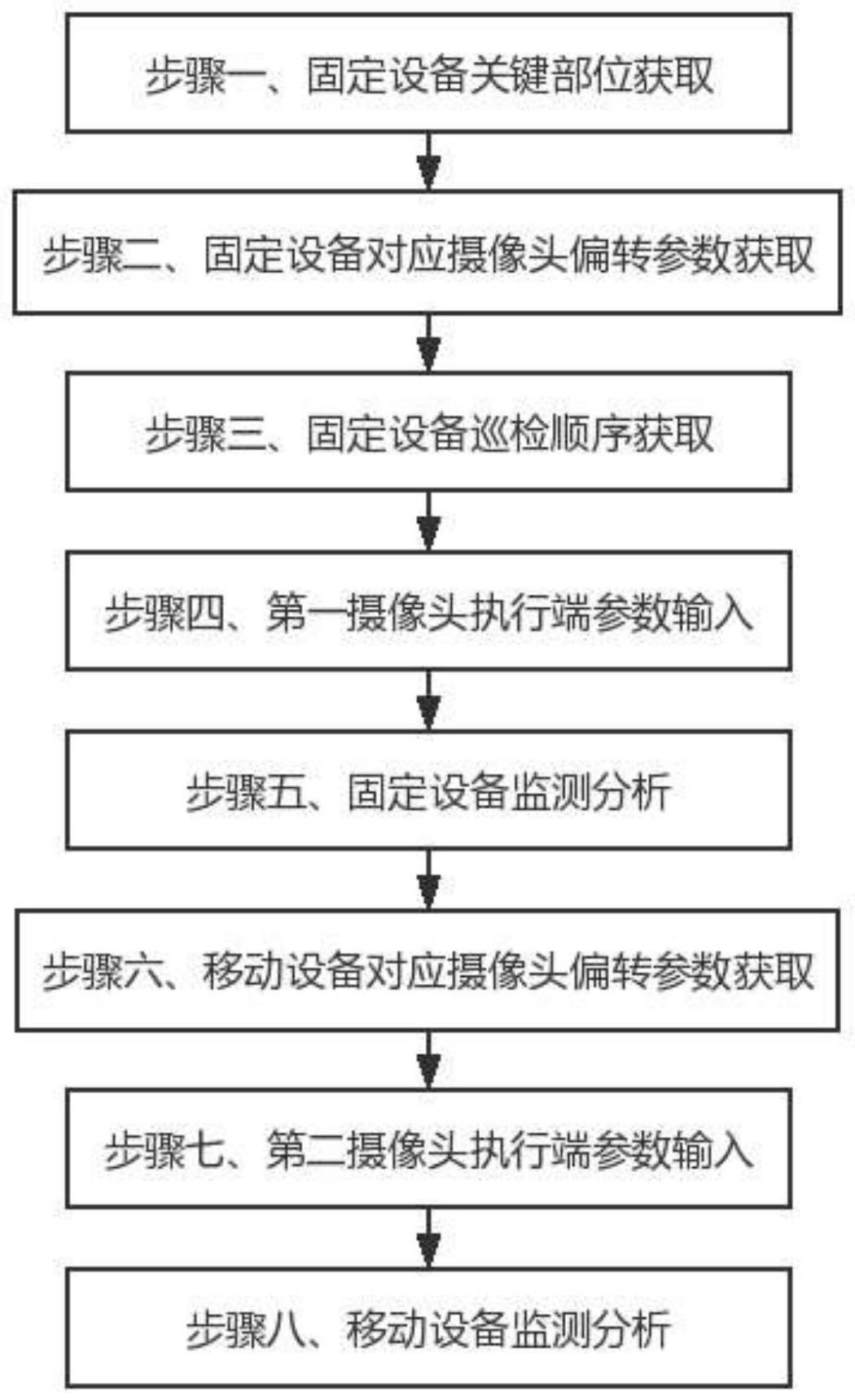
1、针对上述问题,本发明提出了一种基于位置信息的视频智能分析方法,具体技术方案如下:一种基于位置信息的视频智能分析方法,包括如下步骤:步骤一、固定设备关键部位获取:获取目标工厂车间设定区域内各固定设备中需要监控的部位,将其记为各固定设备的关键部位。
2、步骤二、固定设备对应摄像头偏转参数获取:获取第一摄像头在监控各固定设备关键部位时第一摄像头镜头中心点在第一坐标系中的三维坐标,进而获取各固定设备对应的摄像头偏转参数,其中摄像头偏转参数包括第一机臂旋转角度和第二机臂旋转角度。
3、步骤三、固定设备巡检顺序获取:根据各固定设备对应的摄像头偏转参数,获取第一摄像头巡检各固定设备的顺序。
4、步骤四、第一摄像头执行端参数输入:将各固定设备对应的摄像头偏转参数和第一摄像头巡检各固定设备的顺序输入到第一摄像头的执行端。
5、步骤五、固定设备监测分析:获取监测时间段内第一摄像头各轮巡检中各固定设备的图像,分析各固定设备是否存在工作异常情况,若存在工作异常情况,则进行预警。
6、步骤六、移动设备对应摄像头偏转参数获取:获取追踪周期内各采样时间点第二摄像头监控目标工厂车间设定区域内流水线上移动设备时镜头中心点在第二坐标系中的三维坐标,进而获取移动设备对应的摄像头偏转参数集合,其中摄像头偏转参数包括第一机臂旋转角度和第二机臂旋转角度。
7、步骤七、第二摄像头执行端参数输入:将移动设备对应的摄像头偏转参数集合输入到第二摄像头的执行端。
8、步骤八、移动设备监测分析:通过第二摄像头对目标工厂车间设定区域内流水线上各移动设备依次进行追踪式监控,获取各移动设备在追踪周期内各采样时间点的图像,分析各移动设备是否存在故障,并进行相应处理。
9、在上述实施例的基础上,所述步骤一的具体分析过程为:通过第一摄像头获取目标工厂车间设定区域内各固定设备的图像,从数据库中提取各类型固定设备的标准图像,将各固定设备的图像分别与各类型固定设备的标准图像进行比对,得到各固定设备图像与各类型固定设备标准图像的相似度,将最大相似度对应的固定设备类型作为固定设备的类型,统计得到各固定设备的类型。
10、提取数据库中存储的各类型固定设备中需要监控的部位,根据各固定设备的类型,筛选得到各固定设备中需要监控的部位,将其记为各固定设备的关键部位。
11、在上述实施例的基础上,所述步骤二的具体分析过程为:按照设定的坐标系构建方法在第一摄像头所在区域构建三维坐标系,将其记为第一坐标系,设定第一摄像头的初始位置,获取第一摄像头在初始位置时第一摄像头镜头中心点在第一坐标系中的三维坐标,将其记为第一摄像头的初始坐标。
12、调试第一摄像头,获取第一摄像头监控各固定设备关键部位区域中心点时第一摄像头镜头中心点的位置,进而获取第一摄像头在监控各固定设备关键部位时第一摄像头镜头中心点在第一坐标系中的三维坐标,将其记为各固定设备对应的摄像头监控坐标。
13、按照预设的原则设定第一摄像头中第一机臂旋转的正方向和第二机臂旋转的正方向,根据第一摄像头的初始坐标和各固定设备对应的摄像头监控坐标,获取由第一摄像头的初始坐标分别移动到各固定设备对应的摄像头监控坐标时第一摄像头中第一机臂按正方向旋转的角度和第二机臂按正方向旋转的角度,将其分别记为各固定设备对应的第一机臂旋转角度和第二机臂旋转角度。
14、在上述实施例的基础上,所述步骤三中获取第一摄像头巡检各固定设备的顺序,具体过程为:将各固定设备对应的第一机臂旋转角度和第二机臂旋转角度代入公式得到各固定设备的巡检优先级系数βi,i表示第i个固定设备的编号,i=1,2,...,n,其中χ表示预设的固定设备的巡检优先级系数修正因子,e表示自然常数,δθ表示预设的第一摄像头机臂旋转角度的阈值,表示第i个固定设备对应的第一机臂旋转角度,表示第i个固定设备对应的第二机臂旋转角度,i=1,2,...,n,δ1、δ2分别表示预设的固定设备对应的第一机臂旋转角度和第二机臂旋转角度的权重因子。
15、将各固定设备按照巡检优先级系数从大到小的顺序进行排序,进而得到第一摄像头巡检各固定设备的顺序。
16、在上述实施例的基础上,所述步骤五的具体分析过程为:通过第一摄像头对各固定设备进行巡检,设定监测时间段的时长,获取监测时间段内第一摄像头各轮巡检中各固定设备的图像。
17、提取数据库中存储的各类型固定设备对应的各种故障图像,根据各固定设备的类型,筛选得到各固定设备对应的各种故障图像。
18、将监测时间段内第一摄像头各轮巡检中各固定设备的图像与其对应的各种故障图像分别进行比对,若监测时间段内第一摄像头某轮巡检中某固定设备的图像与其对应的某种故障图像相同,表明该固定设备工作异常,并将该固定设备记为异常固定设备,统计各异常固定设备的编号,将各异常固定设备的编号发送至目标工厂车间监控后台,并进行预警,若监测时间段内第一摄像头某轮巡检中某固定设备的图像与其对应的各种故障图像均不相同,表明该固定设备工作正常,将该固定设备记为标记固定设备,获取监测时间段内第一摄像头各轮巡检中各标记固定设备的图像,利用图像处理技术,提取监测时间段内第一摄像头各轮巡检中各标记固定设备图像对应的显示信息,构建各标记固定设备的显示信息集合,将其记为i′表示第i′个标记固定设备的编号,i′=1′,2′,...,n′,表示监测时间段内第一摄像头第b轮巡检中第i′个标记固定设备图像对应的显示信息,表示监测时间段内第一摄像头第c轮巡检中第i′个标记固定设备图像对应的显示信息,c表示监测时间段内第一摄像头巡检的总轮数,将各标记固定设备的显示信息集合发送至目标工厂车间监控后台。
19、在上述实施例的基础上,所述步骤六的具体分析过程包括:按照设定的坐标系构建方法在第二摄像头所在区域构建三维坐标系,将其记为第二坐标系,设定第二摄像头的初始位置,获取第二摄像头在初始位置时第二摄像头镜头中心点在第二坐标系中的三维坐标,将其记为第二摄像头的初始坐标。
20、设定追踪周期的时长,按照等时间间隔原则在追踪周期内设置各采样时间点,获取监控目标工厂车间设定区域内流水线上移动设备在追踪周期内各采样时间点的位置,将其记为各移动设备检测点位置,调试第二摄像头,获取第二摄像头监控各移动设备检测点位置时第二摄像头镜头中心点的位置,进而获取第二摄像头在监控各移动设备检测点位置时第二摄像头镜头中心点在第二坐标系中的三维坐标,将其记为各移动设备检测点位置对应的摄像头监控坐标。
21、在上述实施例的基础上,所述步骤六的具体分析过程还包括:按照预设的原则设定第二摄像头中第一机臂旋转的正方向和第二机臂旋转的正方向,根据第二摄像头的初始坐标和各移动设备检测点位置对应的摄像头监控坐标,获取由第二摄像头的初始坐标分别移动到各移动设备检测点位置对应的摄像头监控坐标时第二摄像头中第一机臂按正方向旋转的角度和第二机臂按正方向旋转的角度,将其记为各移动设备检测点位置对应的第一机臂旋转角度和第二机臂旋转角度,根据各移动设备检测点位置对应的第一机臂旋转角度和第二机臂旋转角度,构建移动设备对应的摄像头偏转参数集合,将其记为j表示第j个移动设备检测点的编号,j=1,2,...,m,其中表示第j个移动设备检测点位置对应的第一机臂旋转角度,表示第j个移动设备检测点位置对应的第二机臂旋转角度,表示第m个移动设备检测点位置对应的第一机臂旋转角度,表示第m个移动设备检测点位置对应的第二机臂旋转角度,m表示移动设备检测点的总数量。
22、在上述实施例的基础上,所述步骤八的具体过程为:按照移动设备放置在目标工厂车间设定区域内流水线上的先后顺序将各移动设备依次编号为1,2,...,u,...,v。
23、通过第二摄像头对目标工厂车间设定区域内流水线上各移动设备依次进行追踪式监控,获取各移动设备在追踪周期内各采样时间点的图像,提取数据库中存储的移动设备在流水线上运动的标准图像,将其记为移动设备参考图像,将各移动设备在追踪周期内各采样时间点的图像与移动设备参考图像进行比对,得到各移动设备在追踪周期内各采样时间点的图像与移动设备参考图像的相似度,将各移动设备在追踪周期内各采样时间点的图像与移动设备参考图像的相似度与预设的相似度阈值进行比较,若某移动设备在追踪周期内某采样时间点的图像与移动设备参考图像的相似度小于预设的相似度阈值,则该移动设备存在故障,将其记为故障移动设备,筛选出各故障移动设备,将各故障移动设备的编号发送至目标工厂车间监控后台。
24、相对于现有技术,本发明所述的一种基于位置信息的视频智能分析方法以下有益效果:1、本发明提供的一种基于位置信息的视频智能分析方法,通过获取各固定设备对应的摄像头偏转参数和第一摄像头巡检各固定设备的顺序,将其输入到第一摄像头的执行端,获取监测时间段内第一摄像头各轮巡检中各固定设备的图像,分析各固定设备是否存在工作异常情况;获取移动设备对应的摄像头偏转参数集合,将其输入到第二摄像头的执行端,获取各移动设备在追踪周期内各采样时间点的图像,分析各移动设备是否存在故障,通过单个摄像头对多个固定设备和单个摄像头对多个移动设备的一对多式监控,从而实现对特定区域进行高精度、高效率的巡检。
25、2、本发明通过获取第一摄像头在监控各固定设备关键部位时第一摄像头镜头中心点在第一坐标系中的三维坐标,得到各固定设备对应的摄像头偏转参数,进而通过第一摄像头对多个固定设备进行巡检;获取追踪周期内各采样时间点第二摄像头监控目标工厂车间设定区域内流水线上移动设备时镜头中心点在第二坐标系中的三维坐标,得到移动设备对应的摄像头偏转参数集合,进而通过第二摄像头对多个移动设备进行追踪式检测,结合固定式仪器设备和移动式仪器设备的特点,对各固定设备和各移动设备分别进行一对多式巡检式监控和一对多式追踪式监控,大大节省资源,同时减少视频信息接收端的数据传输量,对视频信息接收端的包容性更强。
26、3、本发明通过获取各固定设备的关键部位,进一步获取第一摄像头在监控各固定设备关键部位时第一摄像头镜头中心点在第一坐标系中的三维坐标,得到各固定设备对应的摄像头偏转参数及第一摄像头巡检各固定设备的顺序,并输入到第一摄像头的执行端,获取监测时间段内第一摄像头各轮巡检中各固定设备的图像,分析各固定设备是否存在工作异常情况,能够识别不同类型的设备和不同类型设备的关键部位,进而获取不同类型设备关键部位的图像,实现对仪器设备的针对性分析,并提高仪器设备监测分析结果的精准性。
- 还没有人留言评论。精彩留言会获得点赞!