一种基于非对称架构的正交时频空系统的信道估计方法
本发明涉及无线通信,尤其涉及一种基于非对称架构的正交时频空系统的信道估计方法。
背景技术:
1、在例如自动驾驶汽车、无人机、低地球轨道卫星、高速列车等场景中,由于收发器之间的相对运动,无线通信会受到严重的多普勒频移效应的影响。在高移动性场景中,无线信道通常在时间频率域中是双色散的。具体来说,多径效应会导致时间色散,而频率色散是由多普勒频移引起的。然而,作为5g中的关键技术之一的正交频分复用调制技术,容易受频移的影响,导致正交频分复用技术子载波之间的完美正交性被破坏,可能无法支持在高载波频率下的高移动性场景中的稳定高速通信。因此,有研究人员提出了一种名为正交时频空的二维调制技术,以作为支持6g无线系统要求的潜在解决方案之一。
2、相较于经典的正交频分复用技术,正交时频空具有优异的抗多普勒频移鲁棒性。正交时频空将每个比特信息符号调制到一组跨越信号传输带宽与时间周期的二维正交基函数上,称正交时频空调制信号所处的域为时延多普勒域。与在时间频率域中相比,双色散信道在时延多普勒域中相对更加稳定,表现出稀疏性,仅仅需少量参数即可表征信道状态信息。
3、与此同时,考虑到全数字大规模mimo技术在提高系统频谱效率与系统信道容量方面的巨大优势,通过将正交时频空技术与全数字大规模mimo技术结合起来,构建正交时频空系统为用户提供在高载波频率下的高移动性场景中的高质量高速率通信。然而,关于全数字正交时频空系统存在着算法复杂度过高、系统硬件成本开销过大等问题,极大的阻碍了将大规模mimo应用到实际通信的脚步。通过设计全数字非对称收发架构,即仅允许上行链路使用部分天线进行接收,在满足用户通信需求的情况下,极大的降低系统成本与复杂度,为此,也需要解决上下行链路天线阵列孔径不一致所带来的路径参数估计精度差异的问题。但是目前的研究大多基于对称架构的正交时频空系统所设计,并没有考虑到非对称架构的正交时频空系统的特殊性,现有的信道估计方法将不再适用。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有存在的问题,提出了本发明。因此,本发明提供了一种基于非对称架构的正交时频空系统的信道估计方法,用来解决实际问题中,非对称架构中的阵列孔径不一致所带来的路径参数估计精度低、系统成本高和算法复杂的问题。
3、为解决上述技术问题,本发明提供如下技术方案:
4、本发明提供了一种基于非对称架构的正交时频空系统的信道估计方法,包括:
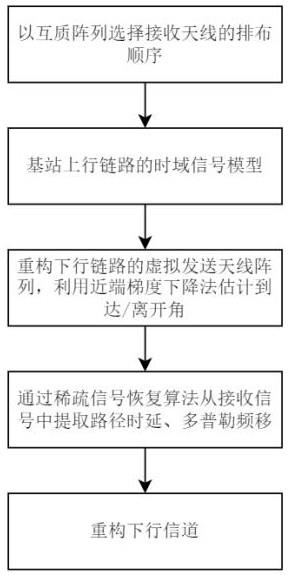
5、基于大规模均匀线性阵列,依据互质阵列的排布选择接收射频链的位置,设计上行链路的线性接收天线阵列 ,构建非对称系统的上行信道模型 ;
6、基于正交时频空调制方案,获得非对称架构中上行链路的输出信号表达式 ,通过所述输出信号表达式推导获得上行链路正交时频空的输入输出关系,并根据此输入输出关系,从中提取角度信息,重构虚拟的均匀线性接收天线阵列 ,得到到达角的估计值 ;
7、于获得的到达角估计值参数,利用信号在时延多普勒维度的稀疏性,设计时延多普勒二维搜索网格 ,筛选与角度相对应的最匹配的路径时延 和多普勒频移 ,并采用最小二乘法计算复信道增益 ;
8、将所得到的上行信道参数:到达角、时延、多普勒频移与复信道增益,基于信道互易性,重构恢复出下行信道 。
9、作为本发明所述的基于非对称架构的正交时频空系统的信道估计方法的一种优选方案,其中:基于非对称架构的正交时频空系统,包括:
10、所述系统由一个配备了 根天线的基站与个高速移动的单天线用户组成,系统采用正交时频空调制方案,工作在时分双工模式;
11、发送端用户首先是将放置在时延多普勒域服从复高斯分布的导频序列,通过逆辛有限傅里叶变换将其变换到时间频率域,然后每个二维正交时频空符号经过正交频分复用技术调制后获得一维的时域信号,最后用户在不同时隙将信号发送给基站;
12、首先所述基站依据根天线的接收信号,恢复出 根天线的虚拟阵列的接收信号,再从中提取角度信息,然后执行与发送端相对应的逆操作来解调信号,最后估计出到达角、时延、多普勒频移和复移信道增益参数,并重构出下行信道以辅助下行通信。
13、作为本发明所述的基于非对称架构的正交时频空系统的信道估计方法的一种优选方案,其中:基于大规模均匀线性阵列,依据互质阵列的排布选择接收射频链的位置,设计上行链路的线性接收天线阵列 ,包括:
14、基站配备了一个均匀线性阵列,共根天线;
15、设计上行链路,使得只有 个接收射频链链接到线性阵列,得到上行导向矢量表示为:
16、 ;
17、其中, 表示第 个用户的第 条路径的到达角;接收天线的索引是通过互质阵列确定的,表示为且 ,
18、 , 与 都为质数,为虚数。
19、作为本发明所述的基于非对称架构的正交时频空系统的信道估计方法的一种优选方案,其中:构建非对称系统的上行信道模型 ,包括:
20、上行信道模型公式表示为:
21、 ;
22、其中, 分别表示复信道增益、时延与多普勒频移, 为路径数, 为时延抽头索引, 为采样频率,表示狄拉克函数,n为时隙。
23、作为本发明所述的基于非对称架构的正交时频空系统的信道估计方法的一种优选方案,其中:基于正交时频空调制方案,获得非对称架构中上行链路的输出信号表达式 ,包括:
24、输出信号是由发送信号经历时频双选信道后获得的,因此上行链路的输出信号在时域的公式表示为:
25、 ;
26、其中, 表示为一个正交时频空帧沿着时延与多普勒索引方向的长度; 与 分别表示路径的物理频移与时延在时延多普勒域的映射;
27、对于实际应用场景中的用户其起始时间已知, 表示有效点的个数,导频序列 服从复高斯分布, 为噪声。
28、作为本发明所述的基于非对称架构的正交时频空系统的信道估计方法的一种优选方案,其中:通过所述输出信号表达式推导获得上行链路的正交时频空的输入输出关系,根据此输入输出关系,从中提取角度信息,重构虚拟的均匀线性接收天线阵列,包括:
29、计算接收信号 的协方差矩阵公式表示为:
30、 ;
31、其中,表示导频信号的方差,表示噪音的方差,为单位向量;
32、从所述的协方差矩阵中提取角度信息,进行选择、重排得到虚拟的上行均匀线性阵列 的观测信号,公式表示为:
33、 ;
34、其中,观测信号 是维度为 的列向量,因为路径数p<<a,此时的角度估计问题等效于一个稀疏信号恢复问题;
35、设计字典矩阵为:
36、 ;
37、其中, 表示可能的角度;
38、通过从字典矩阵 中选择约束问题 中最小一列作为估计的角度,为所有路径的噪声功率,为惩罚因子。
39、作为本发明所述的基于非对称架构的正交时频空系统的信道估计方法的一种优选方案,其中:得到到达角的估计值 ,包括:
40、得到到达角的估计值,采用近端梯度下降法;
41、 令 , ,计算函数 的下降梯度,公式表示为:
42、 ;
43、其中, 表示第 次迭代, 表示步长;然后将 代入梯度算子中,迭代更新软阈值函数得到 ,直到循环收敛,于是得到角度的估计结果 。
44、作为本发明所述的基于非对称架构的正交时频空系统的信道估计方法的一种优选方案,其中:基于获得的到达角估计值参数,利用信号在时延多普勒维度的稀疏性,包括:
45、在获得角度估计值 之后,将接收信号沿数据方向堆叠,获得维度为的列向量表示为:
46、 ;
47、其中,多普勒分量与导频的时延分量分别为:,和。
48、作为本发明所述的基于非对称架构的正交时频空系统的信道估计方法的一种优选方案,其中:设计时延多普勒二维搜索网格 ,筛选与角度相对应的最匹配的路径时延 与多普勒频移 ,并采用最小二乘法计算复信道增益 ,包括:
49、创建不考虑分数时延的二维时延多普勒网格 ,令时延方向网格精度为1,多普勒方向网格精度为 ,表示为:
50、;
51、初始化残差 ,从中依次选择网格点进行匹配筛选,计算公式为:
52、;
53、其中, ,选择最大值对应的网格点作为时延与多普勒的估计值 ,并使用最小二乘法计算 更新复信道增益,同时更新每一步的残差结果 ,重复上述过程 次后,获得信道剩余参数的所有估计值 。
54、作为本发明所述的基于非对称架构的正交时频空系统的信道估计方法的一种优选方案,其中:基于信道互易性,重构恢复出下行信道 ,包括:
55、设计下行链路,使得每根天线都链接到一个发送射频链,得到下行导向矢量表示为:
56、 ;
57、其中,表示第 个用户的第 条路径的离开角;
58、下行信道模型公式表示为:
59、 ;
60、基于信道的互易性,上行信道的信道参数可以直接用于重建下行信道,以辅助下行通信。
61、与现有技术相比,发明有益效果为:本发明所述方法能够通过合理选择接收天线阵列分布,消除上下行天线阵列孔径不一致所带来的估计精度下降的影响,实现准确的角度估计,基于所估计的角度,从接收信号中提取有关路径时延、多普勒频移参数的精确结果;并将角度、时延与多普勒频移的三维搜索空间转换为一维角度搜索与二维时间频率搜索网格,显著降低了算法的复杂度,同时提升了在低信噪比时的参数估计性能,更有效准确的重建下行信道;同时,基于非对称架构的正交时频空系统,适用于用户快速移动和静止的复杂场景,具有较低的算法时延与系统硬件开销,更加适用于实际系统。
- 还没有人留言评论。精彩留言会获得点赞!