一种基于协作干扰的无人机安全通信系统及方法与流程
本发明涉及无人机,具体为一种基于协作干扰的无人机安全通信系统及方法。
背景技术:
1、无人机的组网使用,在空中区域可以构成全方位、立体化、多层次的阵型体系,具有全频段、多体制、多重叠系数的协作性能,可以加强信息传输通信互联互通性和系统抗毁性,能充分发挥体制对抗和群体对抗的优势;传统的干扰方式通常采用“一对一”的点源干扰方式,随着信息化技术的不断发展,在分布式干扰技术和航迹欺骗干扰技术上的研究越来越深入;常规的干扰方式也越来越面临巨大的挑战,尤其在千变万化的空中局势中,面对庞大的组网体系,在灵活多变的局势中,不断变化无人机阵型接受随时可能的任务要求时很难保证无人机的安全通信不受威胁,同时也很难保持有效的组网对抗体系。
技术实现思路
1、本发明的目的在于提供一种基于协作干扰的无人机安全通信系统及方法,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:
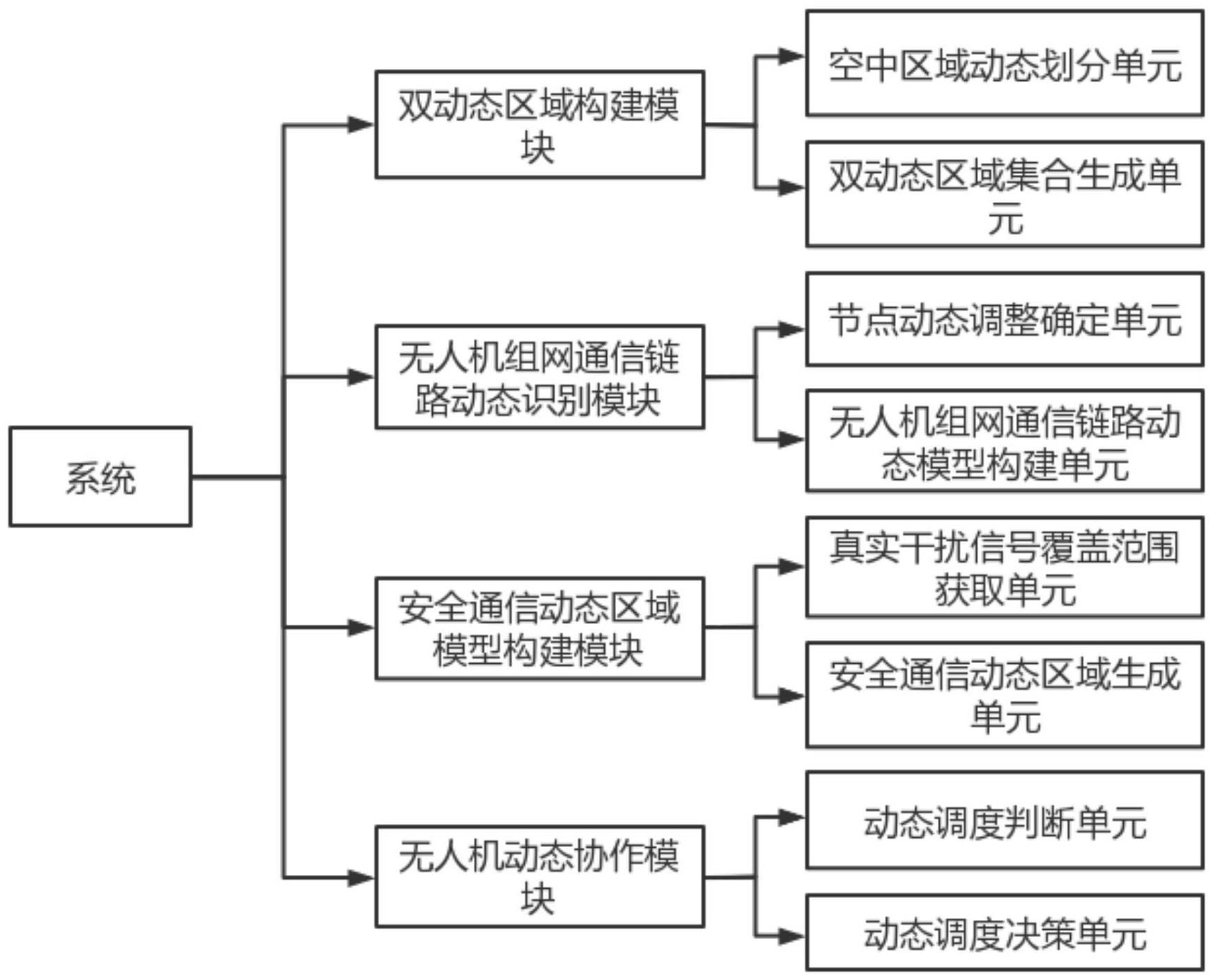
3、一种基于协作干扰的无人机安全通信系统,本系统包括:双动态区域构建模块、无人机组网通信链路动态识别模块、安全通信动态区域模型构建模块和无人机动态协作模块;
4、所述双动态区域构建模块,获取单次派遣空中区域的所有无人机位置信息,并且对单次派遣空中区域的所有无人机位置信息进行实时跟踪,对单次派遣空中区域进行动态区域划分,基于动态区域划分结果,对无人机进行双动态区域集合的生成,所述双动态区域包括指令区域和非指令区域;
5、所述无人机组网通信链路动态识别模块,用于对单次派遣空中区域的所有无人机进行雷达通信链路节点划分,基于雷达通信链路节点划分结果,构建无人机组网通信链路动态模型,对单次派遣空中区域的所有无人机进行组网通信链路动态识别;
6、所述安全通信动态区域模型构建模块,基于组网通信链路动态识别结果,构建无人机组网协作干扰安全通信动态区域模型,生成安全通信动态区域;
7、所述无人机动态协作模块,基于安全通信动态区域,对单次派遣空中区域的所有无人机进行动态调度。
8、进一步的,所述双动态区域构建模块还包括空中区域动态划分单元和双动态区域集合生成单元;
9、所述空中区域动态划分单元,用于对单次派遣空中区域的所有无人机位置信息进行实时跟踪,形成每架无人机的实时动态位置跟踪信息,根据每架无人机的实时动态位置跟踪信息,对单次派遣空中区域进行动态区域划分,确定单次派遣空中区域中的指令区域中无人机的数量和单次派遣空中区域中的非指令区域中无人机的数量,所述单次派遣空中区域为单次派遣任务的整体空中区域,所述指令区域为单次派遣任务的整体空中区域中临时调度局部空中区域,所述非指令区域为单次派遣任务的整体空中区域中除指令区域以外的局部空中区域;
10、所述双动态区域集合生成单元,根据指令区域中无人机的数量和非指令区域中无人机的数量,对单次派遣空中区域的所有无人机进行统一编号信息的生成,根据统一编号信息,对指令区域中无人机进行编号信息提取,生成指令区域编号集合记为u1,对非指令区域中无人机进行编号信息提取,生成非指令区域编号集合记为u2。
11、进一步的,所述无人机组网通信链路动态识别模块还包括节点动态调整确定单元和无人机组网通信链路动态模型构建单元;
12、所述节点动态调整确定单元,将单次派遣空中区域中每架无人机看作一个雷达通信链路节点,所述雷达通信链路节点包括源节点、中继节点和目标节点,其中源节点、中继节点和目标节点,根据t1时刻至t2时刻之间的临时任务要求进行动态调整确定,并且所述源节点为雷达通信发射源,所述目标节点为雷达通信接收源,所述中继节点接收源节点雷达通信发射信息且将接收到的源节点雷达通信发射信息发送至目标节点;
13、其中,进行动态调整确定的方式如下:
14、根据在t1时刻至t2时刻之间的临时任务要求,将无人机ia标记为源节点,将无人机ib标记为目标节点,则无人机ia和无人机ib之间进行点对点的雷达通信,a和b分别表示无人机编号且a≠b;如果无人机ia和无人机ib之间的雷达通信距离满足雷达通信距离限制条件,则无人机ia和无人机ib之间进行点对点直接通信,如果无人机ia和无人机ib之间的雷达通信距离未满足雷达通信距离限制条件,则无人机ia和无人机ib之间通过中继节点连接进行间接通信;
15、所述无人机组网通信链路动态模型构建单元,构建无人机组网通信链路动态模型,对单次派遣空中区域中的所有无人机在t1时刻至t2时刻之间进行动态调整确定,对雷达通信链路进行梳理,形成无人机组网通信链路动态连接关系,所述无人机组网通信链路动态连接关系包括直接通信连接关系和间接通信连接关系,所述直接通信连接关系表示为ia→ib,其中ia和ib依次分别为源节点和目标节点,所述间接通信连接关系表示为ia→i1→ia→...→ic→ib,其中i1、ia、...、ic分别为第1、2、...、c个中继节点,且a≠b≠c,c表示无人机编号;根据无人机组网通信链路动态连接关系,对单次派遣空中区域的所有无人机进行组网通信链路动态识别。
16、进一步的,所述安全通信动态区域模型构建模块还包括真实干扰信号覆盖范围获取单元和安全通信动态区域生成单元;
17、所述真实干扰信号覆盖范围获取单元,基于组网通信链路动态识别结果,对单次派遣空中区域中的所有雷达通信链路节点进行拆分并提取目标节点,将提取的目标节点生成目标节点集合m;根据指令区域编号集合和目标节点集合,在指令区域中对t1时刻至t2时刻之间的临时任务要求指派的无人机进行识别,生成临时指派无人机集合,记为l,且l=u1∩m;构建单次派遣空中区域的三维立体坐标系,根据无人机的实时动态位置跟踪信息,将临时指派无人机集合中的所有无人机进行点到点的直线连接并形成无人机最大连接外包围立体图,对最大连接外包围立体图中外包围面上的无人机进行识别,提取外包围面上的任意一架无人机的编号信息记为id,在外包围面上识别与id直线连接的任意两架无人机并分别记为ie和if,其中d、e和f分别表示无人机编号且d≠e≠f;以id为角顶点,分别以id到ie之间的直线idie和id到if之间的直线idif为角的两边,计算二维扇形角度;以直线ifie的中点到id之间的连接直线为旋转轴,根据二维扇形角度,将二维扇形旋转一周形成圆锥体;分别以id指向ie方向和id指向if方向对二维扇形进行延伸,形成圆锥体延伸范围,将圆锥体延伸范围作为无人机id的干扰信号覆盖范围,调节干扰源发射参数,对无人机id的干扰信号覆盖范围进行限定,将限定后的无人机id的干扰信号覆盖范围记为无人机id的真实干扰信号覆盖范围;
18、所述安全通信动态区域生成单元,用于对最大连接外包围立体图中外包围面上的所有无人机进行真实干扰信号覆盖范围的获取,构建无人机组网协作干扰安全通信动态区域模型,将所有无人机的真实干扰信号覆盖范围的重合覆盖范围记为安全通信动态区域。
19、进一步的,所述无人机动态协作模块还包括动态调度判断单元和动态调度决策单元;
20、所述动态调度判断单元,用于识别安全通信动态区域内无人机数量,根据临时任务要求确定参与临时任务的无人机数量;如果安全通信动态区域内无人机数量大于等于参与临时任务的无人机数量,则保持t1时刻至t2时刻之间的无人机组网空中区域位置阵型,否则对单次派遣空中区域的所有无人机进行动态调度;
21、所述动态调度决策单元,在动态调度时,根据安全通信动态区域内无人机数量和参与临时任务的无人机数量,确定参与临时任务的无人机的缺少数量,则动态调度的无人机数量等于缺少数量;启动第一动态调度决策,对指令区域中除安全通信动态区域以外的区域进行调度,确定指令区域中无人机调度数量,如果调度数量不满足缺少数量的要求,则启动第二动态调度决策;在启动第二动态调度决策时,对非指令区域中的无人机进行调度,根据非指令区域编号集合u2,确定非指令区域中无人机调度数量,非指令区域中无人机调度数量等于缺少数量与指令区域中无人机调度数量之差;在启动第一动态调度决策和启动第二动态调度决策对无人机进行调度时,调取指令区域的无人机组网通信链路动态连接关系和非指令区域的无人机组网通信链路动态连接关系,将指令区域的无人机组网通信链路动态连接关系和非指令区域的无人机组网通信链路动态连接关系中参与调度的任意一条无人机组网通信链路动态连接关系记为v,将v中任意一架参与调度的无人机记为iy,其中y为无人机编号,计算动态调度影响值;分别计算指令区域的所有无人机组网通信链路动态连接关系和非指令区域的所有无人机组网通信链路动态连接关系的动态调度影响值,将动态调度影响值按照从小到大的顺序依次进行排列,在动态调度时,按照所述排列依次进行选择调度,直至满足缺少数量。
22、一种基于协作干扰的无人机安全通信方法,本方法包括以下步骤:
23、步骤s100:获取单次派遣空中区域的所有无人机位置信息,并且对单次派遣空中区域的所有无人机位置信息进行实时跟踪,对单次派遣空中区域进行动态区域划分,基于动态区域划分结果,对无人机进行双动态区域集合的生成,所述双动态区域包括指令区域和非指令区域;
24、步骤s200:对单次派遣空中区域的所有无人机进行雷达通信链路节点划分,基于雷达通信链路节点划分结果,构建无人机组网通信链路动态模型,对单次派遣空中区域的所有无人机进行组网通信链路动态识别;
25、步骤s300:基于组网通信链路动态识别结果,构建无人机组网协作干扰安全通信动态区域模型,生成安全通信动态区域;
26、步骤s400:基于安全通信动态区域,对单次派遣空中区域的所有无人机进行动态调度。
27、进一步的,所述步骤s100的具体实施过程包括:
28、步骤s101:对单次派遣空中区域的所有无人机位置信息进行实时跟踪,形成每架无人机的实时动态位置跟踪信息,根据每架无人机的实时动态位置跟踪信息,对单次派遣空中区域进行动态区域划分,确定单次派遣空中区域中的指令区域中无人机的数量和单次派遣空中区域中的非指令区域中无人机的数量,所述单次派遣空中区域为单次派遣任务的整体空中区域,所述指令区域为单次派遣任务的整体空中区域中临时调度局部空中区域,所述非指令区域为单次派遣任务的整体空中区域中除指令区域以外的局部空中区域;
29、步骤s102:根据指令区域中无人机的数量和非指令区域中无人机的数量,对单次派遣空中区域的所有无人机进行统一编号信息的生成,根据统一编号信息,对指令区域中无人机进行编号信息提取,生成指令区域编号集合记为u1,对非指令区域中无人机进行编号信息提取,生成非指令区域编号集合记为u2。
30、根据上述方法,在空中区域中,无人机的位置信息是动态变化的,同时不同的派遣任务对无人机也会发出随时变化的指令要求,所以需要根据单次派遣空中区域的无人机位置变化信息,以及动态的指令要求,对空中区域进行动态划分,在指令区域中的无人机应对单次的任务要求,而非指令区域的无人机只是暂时处于静默状态;
31、进一步的,所述步骤s200的具体实施过程包括:
32、步骤s201:将单次派遣空中区域中每架无人机看作一个雷达通信链路节点,所述雷达通信链路节点包括源节点、中继节点和目标节点,其中源节点、中继节点和目标节点,根据t1时刻至t2时刻之间的临时任务要求进行动态调整确定,并且所述源节点为雷达通信发射源,所述目标节点为雷达通信接收源,所述中继节点接收源节点雷达通信发射信息且将接收到的源节点雷达通信发射信息发送至目标节点;
33、其中,进行动态调整确定的方式如下:
34、根据在t1时刻至t2时刻之间的临时任务要求,将无人机ia标记为源节点,将无人机ib标记为目标节点,则无人机ia和无人机ib之间进行点对点的雷达通信,a和b分别表示无人机编号且a≠b;如果无人机ia和无人机ib之间的雷达通信距离满足雷达通信距离限制条件,则无人机ia和无人机ib之间进行点对点直接通信,如果无人机ia和无人机ib之间的雷达通信距离未满足雷达通信距离限制条件,则无人机ia和无人机ib之间通过中继节点连接进行间接通信;
35、步骤s202:构建无人机组网通信链路动态模型,对单次派遣空中区域中的所有无人机在t1时刻至t2时刻之间进行动态调整确定,对雷达通信链路进行梳理,形成无人机组网通信链路动态连接关系,所述无人机组网通信链路动态连接关系包括直接通信连接关系和间接通信连接关系,所述直接通信连接关系表示为ia→ib,其中ia和ib依次分别为源节点和目标节点,所述间接通信连接关系表示为ia→i1→ia→...→ic→ib,其中i1、ia、...、ic分别为第1、2、...、c个中继节点,且a≠b≠c,c表示无人机编号;根据无人机组网通信链路动态连接关系,对单次派遣空中区域的所有无人机进行组网通信链路动态识别。
36、根据上述方法,在无人机动态的位置变化中,由于距离的限制和任务要求的变化,必然会产生动态的链路关系,动态的链路关系能够产生动态的数据链路干扰阵型,进而对组网通信链路进行动态识别,对动态的链路关系进行区分;
37、进一步的,所述步骤s300的具体实施过程包括:
38、步骤s301:基于组网通信链路动态识别结果,对单次派遣空中区域中的所有雷达通信链路节点进行拆分并提取目标节点,将提取的目标节点生成目标节点集合m;
39、步骤s302:根据指令区域编号集合和目标节点集合,在指令区域中对t1时刻至t2时刻之间的临时任务要求指派的无人机进行识别,生成临时指派无人机集合,记为l,且l=u1∩m;构建单次派遣空中区域的三维立体坐标系,根据无人机的实时动态位置跟踪信息,将临时指派无人机集合中的所有无人机进行点到点的直线连接并形成无人机最大连接外包围立体图,对最大连接外包围立体图中外包围面上的无人机进行识别,提取外包围面上的任意一架无人机的编号信息记为id,在外包围面上识别与id直线连接的任意两架无人机并分别记为ie和if,其中d、e和f分别表示无人机编号且d≠e≠f;以id为角顶点,分别以id到ie之间的直线idie和id到if之间的直线idif为角的两边,计算二维扇形角度,记为q(id),具体计算公式如下:
40、
41、其中,ifie表示if到ie之间的直线,k(idif)、k(idie)和k(ifie)分别表示直线idif、直线idie和直线ifie的长度;
42、步骤s303:以直线ifie的中点到id之间的连接直线为旋转轴,根据二维扇形角度,将二维扇形旋转一周形成圆锥体;分别以id指向ie方向和id指向if方向对二维扇形进行延伸,形成圆锥体延伸范围,将圆锥体延伸范围作为无人机id的干扰信号覆盖范围,调节干扰源发射参数,对无人机id的干扰信号覆盖范围进行限定,将限定后的无人机id的干扰信号覆盖范围记为无人机id的真实干扰信号覆盖范围;
43、步骤s304:对最大连接外包围立体图中外包围面上的所有无人机进行真实干扰信号覆盖范围的获取,构建无人机组网协作干扰安全通信动态区域模型,将所有无人机的真实干扰信号覆盖范围的重合覆盖范围记为安全通信动态区域。
44、根据上述方法,指令区域是直接接受任务调度的区域,且指令区域的局势也是最紧张最变化莫测的,对于指令区域的安全通信需要加强保护,保证任务的完成;在指令区域中,目标节点直接接受任务调配,进而根据目标节点的位置信息构建最大的安全通信动态区域,通过调整干扰源的工作参数,形成真实干扰信号覆盖范围,可以通过灵活调整参数来灵活调整安全通信动态区域;
45、进一步的,所述步骤s400的具体实施过程包括:
46、步骤s401:识别安全通信动态区域内无人机数量,根据临时任务要求确定参与临时任务的无人机数量;如果安全通信动态区域内无人机数量大于等于参与临时任务的无人机数量,则保持t1时刻至t2时刻之间的无人机组网空中区域位置阵型,否则对单次派遣空中区域的所有无人机进行动态调度;
47、步骤s402:在动态调度时,根据安全通信动态区域内无人机数量和参与临时任务的无人机数量,确定参与临时任务的无人机的缺少数量,则动态调度的无人机数量等于缺少数量;启动第一动态调度决策,对指令区域中除安全通信动态区域以外的区域进行调度,确定指令区域中无人机调度数量,如果调度数量不满足缺少数量的要求,则启动第二动态调度决策;在启动第二动态调度决策时,对非指令区域中的无人机进行调度,根据非指令区域编号集合u2,确定非指令区域中无人机调度数量,非指令区域中无人机调度数量等于缺少数量与指令区域中无人机调度数量之差;
48、步骤s403:在启动第一动态调度决策和启动第二动态调度决策对无人机进行调度时,调取指令区域的无人机组网通信链路动态连接关系和非指令区域的无人机组网通信链路动态连接关系,将指令区域的无人机组网通信链路动态连接关系和非指令区域的无人机组网通信链路动态连接关系中参与调度的任意一条无人机组网通信链路动态连接关系记为v,将v中任意一架参与调度的无人机记为iy,其中y为无人机编号,计算动态调度影响值,具体计算公式如下:
49、
50、其中,h(v)表示v的动态调度影响值,pv表示v中参与调度的无人机集合,r(pv)表示pv中元素数量,r(v)表示v中无人机总数量,s(iy)表示iy到安全通信动态区域中心点距离;
51、分别计算指令区域的所有无人机组网通信链路动态连接关系和非指令区域的所有无人机组网通信链路动态连接关系的动态调度影响值,将动态调度影响值按照从小到大的顺序依次进行排列,在动态调度时,按照所述排列依次进行选择调度,直至满足缺少数量;
52、安全通信动态区域一旦形成,则需要根据临时任务要求,在调度无人机的同时最大化保证阵型的完整度,以应对多变的空中局势;最大化保证阵型的完整度需要考虑无人机组网通信链路动态连接关系的完整和调度距离这两个维度,根据调度距离在保证最快调度的同时保证无人机组网通信链路动态连接关系的完整;动态调度影响值越大则表示完成该次临时任务时对完整度的破坏程度就越大,进而存在的威胁风险就越多。
53、与现有技术相比,本发明所达到的有益效果是:本发明提供的一种基于协作干扰的无人机安全通信系统及方法中,通过对单次派遣空中区域的所有无人机位置信息进行实时跟踪,进而对单次派遣空中区域进行动态区域划分,将空中区域划分为指令区域和非指令区域,以应对无人机位置动态变化和随时变化的指令要求的情况;对无人机进行雷达通信链路节点划分并找寻通信链路关系,构建无人机组网通信链路动态模型,从而形成动态的链路关系,加强动态的数据链路干扰阵型的持久性;构建无人机组网协作干扰安全通信动态区域模型,生成安全通信动态区域,以应对多变的空中局势,加强对通信传输的保护;进而对单次派遣空中区域的所有无人机进行动态调度,形成最大化安全机动区域,保证最快调度的同时最大化保证无人机组网通信链路动态连接关系的完整,减少威胁风险。
- 还没有人留言评论。精彩留言会获得点赞!