一种双向时间同步方法、系统与装置
本发明涉及通信技术中的时间同步,尤其涉及一种双向时间同步方法、系统与装置。
背景技术:
1、共频带定位系统是一种新型的具有广阔前景的通信导航融合系统。共频带定位系统结合无线通信网络与定位导航网络,并发挥其各自优势,实现了受约束场景下高精度定位,其中无线时间同步算法的精度是影响定位精度的一个重要因素之一。
2、目前共频带定位系统中时间同步采用基于tpsn的双向时间同步通信,该通信方法在每次进行通信都会发送时间信息,在每一次通信过程中进行时间同步计算,通过反复、多次的时间同步计算以达到高精度的时间同步。这意味着现有技术在时间同步过程中,需要在两端节点之间不断进行时间信息的交互和同步计算,消耗了大量的通信资源和算力资源。
技术实现思路
1、鉴于此,本发明实施例提供了一种双向时间同步通信方法,以消除或改善现有技术中存在的一个或更多个缺陷,以解决传统通信方法中通信和算力资源开销大的问题。
2、本发明的一个方面提供了一种双向时间同步方法,该方法包括以下步骤:
3、所述主节点和所述从节点建立通信链路;
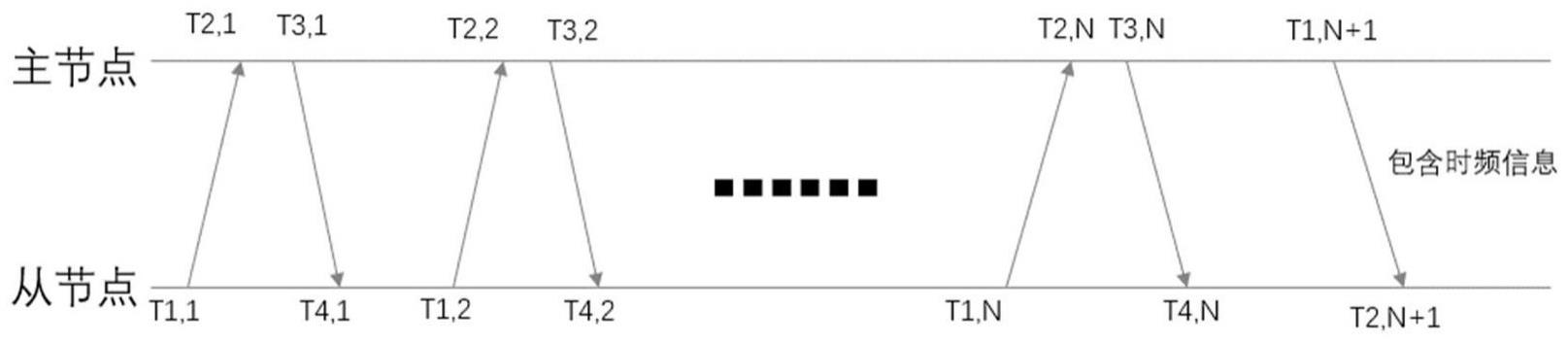
4、由所述主节点与所述从节点进行信号同步交互,在一个交互周期内,由所述从节点率先向所述主节点发送第一同步信号,并接收所述主节点反馈的第二同步信号;由所述从节点记载本地产生的发送所述第一同步信号的第一时间戳,以及接收所述第二同步信号的第二时间戳;由所述主节点记载本地产生的接收所述第一同步信号的第三时间戳,以及发送所述第二同步信号的第四时间戳;
5、在执行多次交互周期后,由所述主节点对本地记载的各交互周期内对应的所述第三时间戳和所述第四时间戳做一次函数拟合得到第一线性函数,将所述第一线性函数的斜率作为主时钟漂移系数,将所述第一线性函数的截距作为主时钟初始相位;由所述从节点对本地记载的各交互周期内对应的所述第一时间戳和所述第二时间戳做一次函数拟合得到第二线性函数,将所述第二线性函数的斜率作为从时钟漂移系数,将所述第二线性函数的截距作为从时钟初始相位;
6、在各交互周期结束后,由所述主节点在本地时间的第五时间戳处,将所述主时钟漂移系数、所述主时钟初始相位以及所述第五时间戳作为时间特征信息发送至所述从节点;
7、根据所述主时钟漂移系数、所述从时钟漂移系数建立同一时刻主节点本地时间和从节点本地时间的关系式,基于所述关系式利用所述第五时间戳、所述主时钟漂移系数、所述从时钟漂移系数、所述主时钟初始相位和所述从时钟初始相位,计算所述主节点和所述从节点的时钟相位差,由所述从时钟漂移系数和所述主时钟漂移系数,计算所述从节点和所述主节点的时钟漂移系数比,根据所述时钟相位差和时钟漂移系数比执行时钟同步操作。
8、在一些实施例中,所述交互周期的执行次数至少为30次。
9、在一些实施例中,由所述主节点对本地记载的各交互周期内对应的所述第三时间戳和所述第四时间戳做一次函数拟合得到第一线性函数,包括:
10、对每个交互周期对应的所述第三时间戳和所述第四时间戳求平均值后,采用最小二乘法对各平均值进行拟合得到所述第一线性函数,表达式为:
11、tm=αm×t+βm;
12、其中,tm表示所述主节点本地时间,t表示时间变量,αm表示拟合得到的所述主时钟漂移系数,βm表示拟合得到的所述主时钟初始相位;
13、由所述从节点对本地记载的各交互周期内对应的所述第一时间戳和所述第二时间戳做一次函数拟合得到第二线性函数,包括:
14、对每个交互周期对应的所述第一时间戳和所述第二时间戳求平均值后,采用最小二乘法对各平均值进行拟合得到所述第二线性函数,表达式为:
15、ts=αs×t+βs;
16、其中,ts表示所述从节点本地时间,t表示时间变量,αs表示拟合得到的所述从时钟漂移系数,βs表示拟合得到的所述从时钟初始相位。
17、在一些实施例中,所述方法还包括:
18、由所述主节点将各交互周期对应的所述第三时间戳和所述第四时间戳存储在所述主节点本地硬件的第一存储空间内;
19、由所述从节点将各交互周期对应的所述第一时间戳和所述第二时间戳存储在所述从节点本地硬件的第二存储空间内。
20、在一些实施例中,根据所述主时钟漂移系数、所述从时钟漂移系数建立同一时刻主节点本地时间和从节点本地时间的关系式中,所述关系式为:
21、ts=α×(tm-tm,0)+β;
22、
23、其中,ts表示所述从节点本地时间,tm表示所述主节点本地时间,tm,0表示所述主节点的实际初始时钟相位,αs表示所述从时钟漂移系数,αm表示所述主时钟漂移系数,α表示所述从时钟与所述主时钟的时钟漂移系数比,β表示主从时钟的初始相位差。
24、在一些实施例中,基于所述关系式利用所述第五时间戳、所述从时钟与所述主时钟的时钟漂移系数比、所述主时钟初始相位和所述从时钟初始相位,计算所述主节点和所述从节点的时钟相位差,包括:
25、根据所述关系式计算所述主从时钟的初始相位差的表达式为:
26、β=ts-α×tm+α×tm,0;
27、与tm=αm×t+βm和ts=αs×t+βs联立,得到:
28、β=βs-α×βm+α×tm,0;
29、其中,ts表示所述从节点本地时间,tm表示所述主节点本地时间,tm,0表示所述主节点的实际初始时钟相位,α表示所述从时钟与所述主时钟的时钟漂移系数比,β表示主从时钟的初始相位差;
30、根据所述同一时刻主节点本地时间和从节点本地时间的关系式,所述主节点发送所述时间特征信息时,从节点的时间的计算式为:
31、ts,end=α×(tm,end-tm,0)+β;
32、其中,ts,end表示所述主节点发送所述时间特征信息时从节点的时间,tm,end表示所述第五时间戳,tm,0表示所述主节点的实际初始时钟相位,α表示所述从时钟与所述主时钟的时钟漂移系数比,β表示主从时钟的初始相位差;
33、所述主节点发送所述时间特征信息时从节点的时间与所述第五时间戳的差,即为此时主从时钟的相位差,计算式为:
34、ts,end-tm,end=(α-1)×(tm,end-tm,0)+β;
35、引入β=βs-α×βm+α×tm,0,得到:
36、ts,end-tm,end=(α-1)×(tm,end-tm,0)+βs-α×βm。
37、其中,tm,end表示所述第五时间戳,tm,0表示所述主节点的实际初始时钟相位,βm表示拟合得到的所述主时钟初始相位,此处tm,0=βm,α表示所述从时钟与所述主时钟的时钟漂移系数比。
38、在一些实施例中,所述主节点和所述从节点建立通信链路之前,还包括:
39、由所述从节点进行计时,并按照设定时间间隔发起执行双向时间同步。
40、在一些实施例中,所述方法还包括:
41、由所述从节点对多次计算得到的所述时钟相位差和所述时钟漂移系数比计算标准偏差,将所述标准偏差与预设警戒值进行对比,当所述标准偏差大于等于所述预设警戒值时,生成告警信息。
42、本发明的另一方面提供了一种双向时间同步系统,所述系统包括至少一个主节点和从节点;所述主节点和所述从节点均包含处理器和存储器,所述存储器中存储有计算机指令,所述处理器用于执行所述存储器中存储的计算机指令,当所述计算机指令被处理器执行时,该系统中的所述主节点和所述从节点实现上述方法的步骤。
43、本发明的另一方面提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述方法的步骤。
44、本发明的有益效果至少是:
45、本发明所述的一种双向时间同步方法、系统与装置,要求主从节点在前n次交互周期通信过程中,仅记载发射和接收到同步信号时在本地的时间戳,并不需要额外打包时间信息到交互信号中,能够减少打包时间信息的误差。在第n次交互周期结束后,由主节点和从节点分别对本地记载的时间戳进行一次函数拟合以得到主节点的主时钟漂移系数和主时钟初始相位,以及从节点的从时钟漂移系数和从时钟初始相位,通过建立同一时刻主节点本地时间和从节点本地时间的关系式,基于关系式根据主节点发送交互信号的本地时间戳、主时钟漂移系数、主时钟初始相位、从时钟漂移系数和从时钟初始相位推导计算出主节点和从节点的时钟相位差,由从时钟漂移系数和主时钟漂移系数,计算出从节点和主节点的时钟漂移系数比,根据时钟相位差和时钟漂移系数比执行时钟同步操作。
46、本发明实现时间同步时仅仅需要极少量的时间信息即可完成时间同步,计算时不会消耗大量资源与时间,算法简单,容易实现。能够在保证一定程度的高精准的时间同步下,大幅度减少通信资源的消耗。
47、本发明的附加优点、目的,以及特征将在下面的描述中将部分地加以阐述,且将对于本领域普通技术人员在研究下文后部分地变得明显,或者可以根据本发明的实践而获知。本发明的目的和其它优点可以通过在说明书以及附图中具体指出的结构实现到并获得。
48、本领域技术人员将会理解的是,能够用本发明实现的目的和优点不限于以上具体所述,并且根据以下详细说明将更清楚地理解本发明能够实现的上述和其他目的。
- 还没有人留言评论。精彩留言会获得点赞!