空地组网的无蜂窝大规模MIMO无人机接入点部署方法与流程
本发明涉及一种无人机接入点部署方法,特别是一种空地组网的无蜂窝大规模mimo无人机接入点部署方法。
背景技术:
1、近年来,随着无线通信技术的飞速发展,传统蜂窝架构开始转变为无蜂窝架构,无蜂窝大规模mimo(多进多出,multiple-input multiple-output,mimo)系统应运而生。无蜂窝大规模mimo可以消除小区间干扰,显著提升系统容量。但目前无蜂窝大规模mimo都是地面接入点,形式固定,无法随用户移动而实时改变分布,不能适应系统变化。无人机因其灵活部署特点,能够在如山区救援等地形复杂和用户移动频繁的场景下以自动化方式高效执行很多关键任务,且随着天线高度的增加会提高视距传输的概率,显著改善通信链路质量。
2、由于无人机的机动性以及灵活性,需要同时考虑到无人机储能有限,不能长时间工作,无人机作为空中接入点与地面接入点联合组网构建无蜂窝大规模mimo系统时,根据用户需求调整自身高度和位置改善通信质量以及在紧急情况下快速部署无人机进行通信,是一个亟待解决的问题。
技术实现思路
1、发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种空地组网的无蜂窝大规模mimo无人机接入点部署方法。
2、为了解决上述技术问题,本发明公开了一种空地组网的无蜂窝大规模mimo无人机接入点部署方法,包括如下步骤:
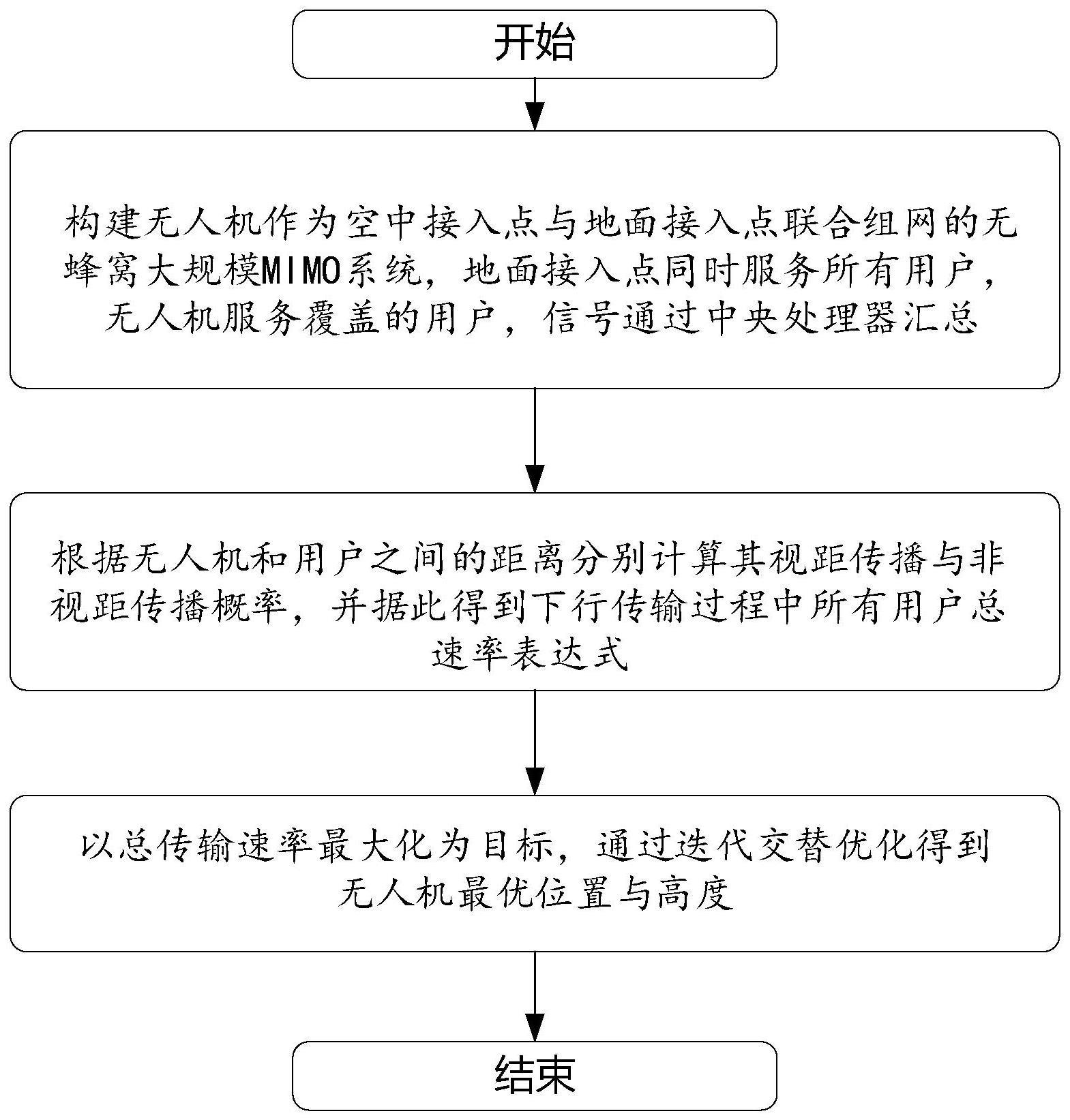
3、步骤1、构建所述无蜂窝大规模mimo系统:无人机作为空中接入点与地面接入点联合组网,地面接入点同时服务所有用户,无人机接入点服务其所覆盖的用户,且所述系统中传输的所有信号通过中央处理器进行汇总;
4、步骤2、根据无人机和用户之间的距离,分别计算无人机和用户之间的无线链路的视距传播与非视距传播概率,并据此得到下行传输过程中所有用户总速率表达式,具体包括如下步骤:
5、步骤2-1、设共有m个接入点,其中,m1个地面接入点,m2个无人机接入点,k个用户,接入点和用户均为单天线,用户在平面内随机分布,第m1个地面接入点坐标为第m2个无人机接入点水平坐标为高度为h,第k个用户坐标为(xk,yk);第m1个地面接入点与第k个用户之间的大尺度衰落为具体如下:
6、
7、其中,表示第m1个地面接入点与第k个用户之间的距离,α2为非视距传播路径衰减因子;
8、第m2个无人机接入点与第k个用户之间的大尺度衰落为具体如下:
9、
10、其中,是视距传播概率,α1表示视距传播路径衰减因子,是第m2个无人机接入点与第k个用户之间欧式距离,计算方法如下:
11、
12、视距传播概率计算方法如下:
13、
14、其中,v1和v2表示环境参数,是第k个用户与第m2个无人机接入点之间的仰角,计算方法为:
15、
16、步骤2-2、计算下行传输过程中第k个用户的传输速率ck,方法如下:
17、
18、其中,ι表示有用信号功率,计算方法如下:
19、
20、θ表示信道增益误差,计算方法如下:
21、
22、表示其他用户干扰,计算方法如下:
23、
24、其中,pd表示接入点的信号发送功率,是第m1个地面接入点与第k个用户之间的估计信道方差,是第m2个无人机与第k个用户之间的估计信道方差,表示第m1个地面接入点向用户发送数据的功率约束系数,表示第m2个无人机接入点向用户发送数据的功率约束系数,ak表示服务于第k个用户的无人机接入点集合,表示第m2个无人机接入点覆盖的用户集合,估计信道方差和的计算方法如下:
25、
26、其中,τp是导频信号长度,pu是导频信号的平均发送功率;
27、步骤2-3,根据步骤2-2得到的第k个用户的传输速率ck,计算所有用户总速率f(xu,yu,h),具体方法如下:
28、
29、其中,k是用户数量。
30、步骤3、以步骤2中所述的下行传输过程中所有用户总速率最大化为目标,通过迭代交替优化得到无人机最优位置与高度,具体包括:
31、定义所有无人机的水平横坐标向量为水平纵坐标向量为以最大化用户总速率为目标函数f(xu,yu,h),利用迭代交替梯度下降方法求解优化问题,得到系统最优的无人机位置及高度:
32、
33、其中,s表示所述无蜂窝大规模mimo系统所服务的区域,r是无人机的覆盖半径,由得到,其中表示无人机的天线下倾角度,|ak|表示服务于第k个用户的无人机个数。
34、步骤3中所述的利用迭代交替梯度下降方法求解优化问题,具体包括以下步骤:
35、步骤3-1、m1个地面接入点,m2个无人机和k个用户分布在区域s内,随机无人机的坐标位置随机给定无人机的高度h*=h(0),预先设置初始梯度下降步长v=0.1,u=1,迭代次数t=0,i=0,j=0,最大误差ε=10-6;
36、步骤3-2、在固定无人机坐标的情况下,将无人机高度h(i)代入目标函数,计算出初始的总传输速率
37、步骤3-3、根据梯度下降法,目标函数对无人机高度求偏导,计算出第i次迭代过程中无人机高度的梯度得到下一次迭代无人机高度h(i+1)=h(i)+vp(i);
38、步骤3-4、如果1≤|ak|≤m,则计算用户总速率执行步骤3-5;否则,重置用户初始位置并回到步骤3-1;
39、步骤3-5、令i=i+1,重复步骤3-3,直到满足条件:
40、
41、或迭代次数达到预设的最大值,得到无人机的最优高度h*;
42、步骤3-6、利用步骤3-5得到的无人机最佳高度j,将无人机坐标代入目标函数,计算出用户总速率为
43、步骤3-7、根据梯度下降,目标函数对无人机水平坐标求偏导,计算出第j次得到梯度向量q(j):
44、
45、得到下一次迭代无人机水平坐标为
46、步骤3-8、如果无人机坐标超出系统区域范围,则选择一个可回退至区域范围内的步长回退一步,得到最新坐标下的总传输速率
47、步骤3-9、令j=j+1,重复步骤3-7,直到满足条件:
48、
49、或迭代次数达到预设的最大值,得到无人机的最优坐标
50、步骤3-10、令t=t+1,若满足条件:
51、
52、则输出无人机最优位置坐标为否则,重复步骤3-2至步骤3-10。
53、步骤4,遍历计算每个无人机的最优位置与高度,并据此部署无人机,完成空地联合组网的无蜂窝大规模mimo无人机接入点部署。
54、有益效果:
55、本发明所提出的方法,特别适用于地形复杂的紧急救援及热点地区等用户移动较频繁和人群拥挤的通信场景,可能够根据用户需求和网络变化,实时快速调整空中接入点部署位置和高度,以大幅提升系统传输速率。本发明的方法在设计时充分地考虑了实际的通信场景需求,在无蜂窝大规模mimo系统架构下,引入无人机作为空中接入点,并给出无人机的最优部署位置和高度,最终方法具有较强的现实可行性,能够切实地应用于实际的通信场景中。
56、此外,本发明还为空地联合组网的无蜂窝大规模mimo通信系统的相关研究和应用提供了可以一种全新的思路,为无线通信领域内的其他相关问题提供了参考,可以以此为依据进行拓展延伸和深入研究,具有十分广阔的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!