传感器的精度检测方法、检测装置、电子设备和存储介质与流程
本技术涉及计算机,特别是涉及一种传感器的精度检测方法、传感器的精度检测装置、电子设备和计算机可读存储介质。
背景技术:
1、图像传感器是用于使用对光起反应的光敏半导体材料将光转换为电信号的图像拍摄装置。随着汽车、医疗、计算机和通信行业的发展,在诸如智能手机、数码相机、游戏机、物联网、机器人、安全相机和医疗微型相机等各个领域中,对高精准度的图像传感器的需求正在增长。
2、在图像传感器应用时,需要先确定图像传感器的拍摄精度,即确定图像传感器拍摄的图像的像素深度与期望深度之间的差异,才能根据图像传感器的拍摄精度进行后续的应用。目前的图像传感器的精度检测中,一般是通过检测工装(如标定工件)对图像传感器的拍摄精度进行检测。但是由于检测工装的使用复杂度相对较高,以及随着使用次数的增长,其检测准确率会逐步降低,导致对图像传感器进行精度检测的准确度不高,影响图像传感器在后续的功能应用。
技术实现思路
1、本公开提供一种传感器的精度检测方法、传感器的精度检测装置、电子设备、计算机可读存储介质和计算机程序产品,以至少解决相关技术中对图像传感器进行精度检测的准确度不高的问题。本公开的技术方案如下:
2、根据本公开实施例的第一方面,提供一种传感器的精度检测方法,包括:
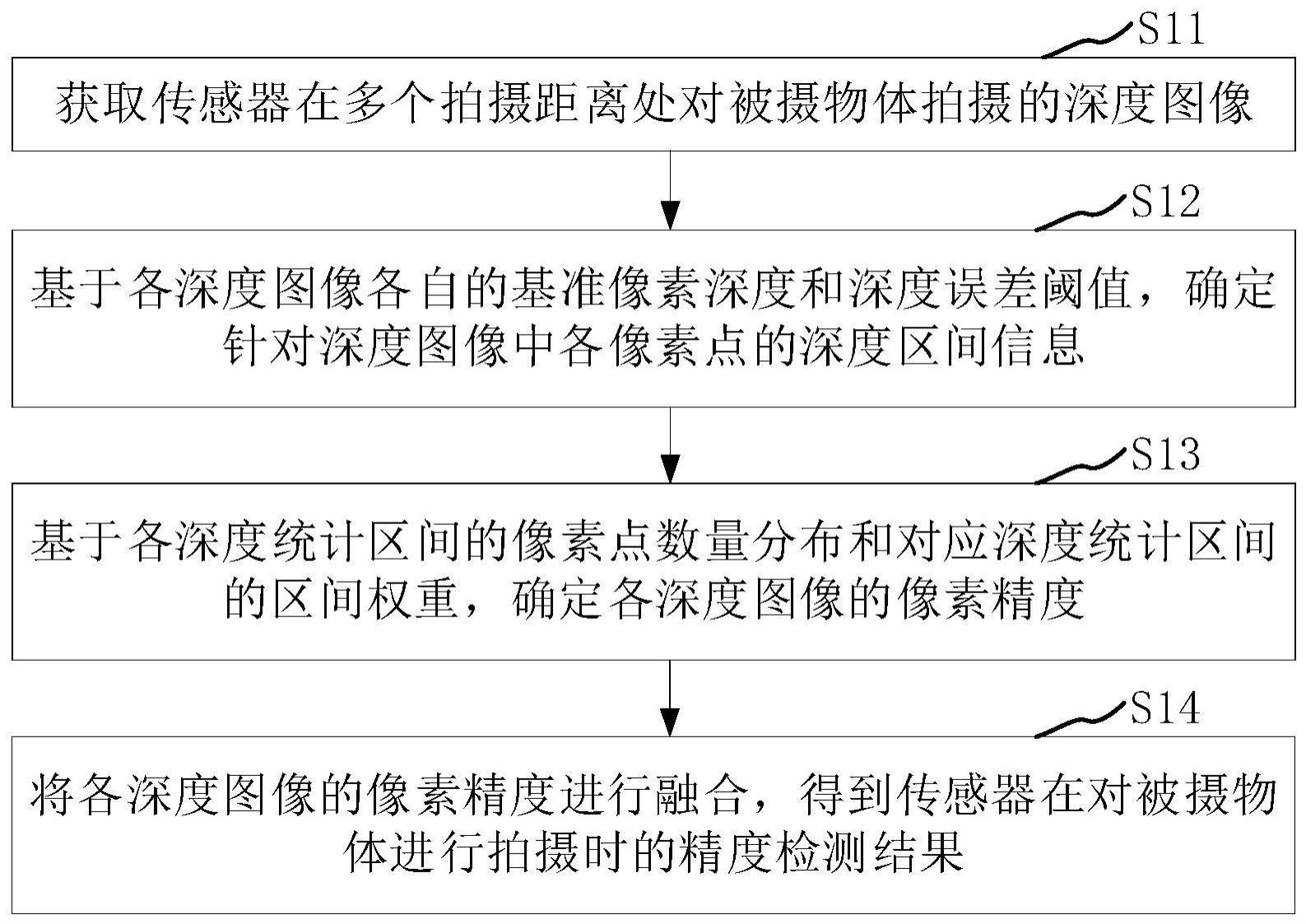
3、获取传感器在多个拍摄距离处对被摄物体拍摄的深度图像;
4、基于各所述深度图像各自的基准像素深度和深度误差阈值,确定针对所述深度图像中各像素点的深度区间信息;所述深度区间信息包括多个深度统计区间和各所述深度统计区间的区间权重,所述深度统计区间为所述像素点的实际像素深度所属的深度区间;
5、基于各所述深度统计区间的像素点数量分布和对应所述深度统计区间的区间权重,确定各所述深度图像的像素精度;所述像素精度程度表征所述深度图像中各像素点的像素深度偏离所述基准像素深度的程度;
6、将各所述深度图像的像素精度进行融合,得到所述传感器在对所述被摄物体进行拍摄时的精度检测结果。
7、在一示例性实施例中,所述将各所述深度图像的像素精度进行融合,得到所述传感器在对所述被摄物体进行拍摄时的精度检测结果,包括:
8、获取针对各所述拍摄距离预设的距离权重;
9、将所述传感器在各所述拍摄距离处拍摄的深度图像的像素精度与对应的所述距离权重进行加权求和处理,得到所述传感器的精度检测结果。
10、在一示例性实施例中,所述像素点数量分布基于所述深度统计区间内包括的像素点的数量占据对应所述深度图像内包括的全部像素点的数量的比例表征;
11、所述基于各所述深度统计区间的像素点数量分布和对应所述深度统计区间的区间权重,确定各所述深度图像的像素精度,包括:
12、针对每一所述深度图像,将各所述深度统计区间的区间权重与对应的所述像素点数量比例进行加权求和处理,确定所述深度图像的像素精度。
13、在一示例性实施例中,所述传感器在各所述拍摄距离处对被摄物体拍摄的深度图像的数量为连续拍摄的至少两张;
14、在所述确定各所述深度图像的像素精度之前,还包括:
15、针对每一张所述深度图像,确定各所述深度统计区间内包括的像素点的数量占据对应所述深度图像内包括的全部像素点的数量的比例;
16、在各所述拍摄距离处拍摄得到的所述连续拍摄的至少两张深度图像中,确定各所述深度统计区间所对应的所述比例之间的平均值,并基于所述平均值表征所述深度统计区间的像素点数量分布。
17、在一示例性实施例中,所述基于各所述深度图像各自的基准像素深度和深度误差阈值,确定针对所述深度图像中各像素点的深度区间信息,包括:
18、针对每一所述深度图像,基于所述基准像素深度和所述深度误差阈值,确定一初始深度区间;
19、等分所述初始深度区间为预设数量个第一类子区间;以及
20、针对所述初始深度区间的上限,将大于所述上限的深度范围确定为第二类子区间;以及
21、针对所述初始深度区间的下限,将小于所述下限的深度范围确定为第三类子区间;
22、将所述第一类子区间、所述第二类子区间和所述第三类子区间作为深度统计区间。
23、在一示例性实施例中,所述基于各所述深度图像各自的基准像素深度和深度误差阈值,确定针对所述深度图像中各像素点的深度区间信息,包括:
24、基于各所述深度统计区间对预设的正态分布函数的正态分布区间进行等分,得到与各所述深度统计区间分别相对应的多个子类分布区间;
25、针对每一所述子类分布区间,基于所述子类分布区间在所述正态分布函数中的定积分,确定与所述子类分布区间相对应的深度统计区间的区间权重。
26、在一示例性实施例中,所述基于所述子类分布区间在所述正态分布函数中的定积分,确定与所述子类分布区间相对应的深度统计区间的区间权重,包括以下两项:
27、将与所述第一类子区间相对应的所述子类分布区间的定积分乘以第一预设数值,得到第一算数值,并将所述第一算数值作为所述第一类子区间的区间权重;
28、将与所述第二类子区间和所述第三类子区间分别相对应的所述子类分布区间的定积分乘以第二预设数值,得到第二算数值,并将所述第二算数值分别作为所述第二类子区间和所述第三类子区间的区间权重;
29、其中,所述第一预设数值为正数,所述第二预设数值为负数。
30、根据本公开实施例的第二方面,提供一种传感器的精度检测装置,包括:
31、图像获取单元,被配置为执行获取传感器在多个拍摄距离处对被摄物体拍摄的深度图像;
32、深度区间单元,被配置为执行基于各所述深度图像各自的基准像素深度和深度误差阈值,确定针对所述深度图像中各像素点的深度区间信息;所述深度区间信息包括多个深度统计区间和各所述深度统计区间的区间权重,所述深度统计区间为所述像素点的实际像素深度所属的深度区间;
33、像素精度单元,被配置为执行基于各所述深度统计区间的像素点数量分布和对应所述深度统计区间的区间权重,确定各所述深度图像的像素精度;所述像素精度程度表征所述深度图像中各像素点的像素深度偏离所述基准像素深度的程度;
34、精度检测单元,被配置为执行将各所述深度图像的像素精度进行融合,得到所述传感器在对所述被摄物体进行拍摄时的精度检测结果。
35、根据本公开实施例的第三方面,提供一种电子设备,包括:
36、处理器;
37、用于存储所述处理器的可执行指令的存储器;
38、其中,所述处理器被配置为执行所述可执行指令,以实现如上所述的传感器的精度检测方法。
39、根据本公开实施例的第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质中包括计算机程序,当所述计算机程序由电子设备的处理器执行时,使得所述电子设备能够执行如上述任一项所述的传感器的精度检测方法。
40、根据本公开实施例的第五方面,提供一种计算机程序产品,所述计算机程序产品中包括程序指令,所述程序指令被电子设备的处理器执行时,使得所述电子设备能够执行如上述任一项所述的传感器的精度检测方法。
41、本公开的实施例提供的技术方案至少带来以下有益效果:
42、该方法先通过获取传感器在多个拍摄距离处对被摄物体拍摄的深度图像;基于各深度图像各自的基准像素深度和深度误差阈值,确定针对深度图像中各像素点的深度区间信息;深度区间信息包括多个深度统计区间和各深度统计区间的区间权重,深度统计区间为所述像素点的实际像素深度所属的深度区间;基于各深度统计区间的像素点数量分布和对应深度统计区间的区间权重,确定各所述深度图像的像素精度;像素精度程度表征所述深度图像中各像素点的像素深度偏离所述基准像素深度的程度;将各深度图像的像素精度进行融合,得到传感器在对被摄物体进行拍摄时的精度检测结果。这样,在一方面,先根据传感器在多个拍摄距离处拍摄的深度图像的深度区间信息,来确定各个深度图像的像素精度,再融合各个深度图像的像素精度,以得到传感器的精度检测结果,从而优化了对传感器进行精度检测的流程,降低了人力和物力的消化;在另一方面,通过区别于现有技术中通过检测工装对传感器进行精度检测的方式,根据深度图像中各深度统计区间的像素点数量分布和区间权重,来确定深度图像的像素精度,以利用各个深度图像的像素精度得到传感器的精度检测结果,能够有效避免由于检测工件的使用损耗对传感器精度检测的影响,提高了对传感器精度检测的准确度,加快了对传感器精度检测的效率,有利于传感器在后续的功能应用。
43、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!