一种野生动物保护区的行踪监控方法及系统与流程
本发明涉及野生动物监控的,特别是涉及一种野生动物保护区的行踪监控方法及系统。
背景技术:
1、在野生动物保护区中为了减少人类对野生动物的影响,所以一般通过安装监控的方式对野生动物进行拍摄跟踪,使人们更多的了解野生动物的生存环境和生存方式。
2、但是现有的野生动物监控设备结构比较简单,如公告号为cn213745995u的实用新型专利中公开的一种野生动物保护用摄像机野外固定装置和公告号为cn216852119u的实用新型专利中公开的一种基于野生动物保护用野外摄像机固定装置等现有技术,装时需要使用扎带、绳子或金属丝将监控捆绑在野生动物经常活动的区域内的树干上,费时费力,尤其是监控鸟类或在树上生活的野生动物时,需要将监控安装至树干高处,不仅费时费力,而且具有危险性且安装后不方便对拍摄角度和高度进行调节,后续不方便对设备进行回收,再有不方便对周围经过的动物进行跟踪拍摄;
3、而通过如公开号为cn110239728a的发明专利中公开的用于野生动物研究的智能型无人机这一类现有技术虽然可以直接控制器调节位置和高度对野生动物进行监控,但是其续航能力较差,不方便长时间的对特定区域进行监控,导致实用性较差;
4、因此亟需一种野生动物保护区的行踪监控方法及系统用来解决上述问题。
技术实现思路
1、为解决上述技术问题,本发明提供一种通过高度调节模块在支撑机构上移动,并对摄像模块的拍摄角度进行调节,方便摄像模块对支撑机构周围的地面、树冠和空中进行拍摄,之后通过摄像模块对需要跟踪的动物进行摄像范围内的跟踪拍摄,获取较多的动物图像数据,从而提高设备的实用性的一种野生动物保护区的行踪监控方法及系统。
2、本发明的一种野生动物保护区的行踪监控系统,包括:
3、支撑机构:直立于地面上,对高度调节机构进行支撑和导向;
4、控制模块:安装于支撑机构的顶部,对摄像模块拍摄的图像进行传输,或将接收的命令传输至高度调节模块和摄像模块中,并为高度调节机构和摄像模块补充电能;
5、高度调节模块:安装于支撑机构上,并在支撑机构上移动,对摄像模块的高度和拍摄角度进行调节;
6、摄像模块:对周围进行拍摄,并对设定的需要跟踪的动物进行摄像范围内的跟踪拍摄;
7、云服务器:将控制模块中的图像传输至监控室,或将监控室中的命令传输至控制模块中;
8、通过高度调节模块在支撑机构上移动,并对摄像模块的拍摄角度进行调节,方便摄像模块对支撑机构周围的地面、树冠和空中进行拍摄,之后通过摄像模块对需要跟踪的动物进行摄像范围内的跟踪拍摄,获取较多的动物图像数据,从而提高设备的实用性。
9、优选的,所述支撑机构包括基座、多组支撑柱和遮雨罩,基座的底端固定安装于地面上,相邻支撑柱之间通过多组螺栓固定连接,底部支撑柱的底端固定安装于基座顶端,遮雨罩固定安装于顶部支撑柱的顶端,并且多组支撑柱上设置有滑槽,滑槽的内部设置有齿条;通过多组支撑柱组装的方式,方便在林区中对支撑机构进行分体运输,并且多组支撑柱组装后,方便对高度调节机构进行导向和支撑,从而提高设备的实用性和稳定性。
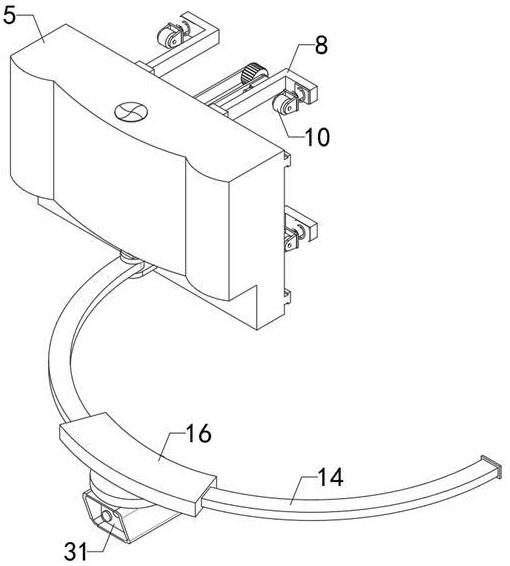
10、优选的,所述高度调节模块包括中控模块、多组滑轨、电缸、多组支架、多组弹簧、多组第一滚轮、多组固定架、多组齿轮、第一电机和角度调节模块,多组滑轨的后端均与中控模块的后端相连接,并且中控模块顶端的充电口上设置有遮雨板,中控模块的内部设置有蓄电池和中央控制模块,所述中央控制模块对电缸、第一电机、第三电机和角度调节模块进行控制,电缸固定安装于中控模块的后端,多组支架分别滑动安装于两组滑轨上,并且多组支架均呈l形,多组弹簧的一端分别固定安装于多组支架上,多组第一滚轮分别安装于多组弹簧的另一端,多组固定架的前端均与中控模块的后端相连接,多组齿轮分别转动安装于多组固定架上,第一电机固定安装于一组固定架上,并且第一电机对一组齿轮进行驱动,角度调节模块安装于中控模块的前部;通过电缸收缩,使多组支架向中控模块的中部移动,之后将多组支架伸入至支撑柱的滑槽中,并使多组齿轮均与滑槽内的齿条内核连接,再通过电缸伸展,使多组支架分别向中控模块的左端和右端移动,使多组第一滚轮与滑槽的内壁接触,之后打开第一电机,使齿轮与滑槽中的齿条啮合传动,对中控模块的高度进行调节,再通过角度调节模块对摄像模块的拍摄角度进行调节,从而提高设备的实用性。
11、优选的,所述角度调节模块包括弧形导轨、第二电机、滑块、第二滚轮和第三电机,弧形导轨的一端转动安装于中控模块的前端,第二电机安装于中控模块的前端,并且第二电机的输出轴与弧形导轨的顶部相连接,滑块滑动安装于弧形导轨上,第二滚轮转动安装于滑块的底部,第三电机安装于滑块上,并且第三电机的输出轴与第二滚轮的前端相连接,所述摄像模块安装于滑块上;通过第二电机驱动弧形导轨转动,对摄像模块的拍摄角度进行调节,之后通过第三电机驱动第二滚轮在弧形导轨上滚动,对滑块的位置进行调节,调节摄像模块的拍摄位置,从而提高设备的实用性。
12、优选的,所述摄像模块包括:
13、旋转驱动单元:对高清摄像头、红外摄像头和微光摄像头的拍摄方向进行调节;
14、深度学习处理器:对拍摄的图像进行分析处理,判断图像中动物是否为设定的需要监控的动物;
15、数据传输单元:将拍摄的图像数据传输至控制模块中,或对控制模块发出的命令进行接收;
16、高清摄像头:对支撑机构的周围进行高清拍摄,获取动物的清晰图像;
17、红外摄像头:对支撑机构的周围进行红外拍摄,配合高清摄像头获取夜间动物的清晰图像;
18、微光摄像头:对支撑机构的周围进行微光拍摄,配合高清摄像头和红外摄像头获取光线较差时动物的清晰图像;方便在不同光亮的环境中获取动物的清晰图像,从而提高设备的实用性。
19、优选的,所述控制模块包括控制模块和充电模块,控制模块固定安装于遮雨罩的顶端,并且控制模块的底部设置有充电端,充电模块安装于控制模块上;
20、所述控制模块包括:
21、数据储存模块:对摄像模块发出的图像数据进行限期储存;
22、数据接收模块:对摄像模块发出的图像数据进行接收;
23、数据发送模块:将接收的图像数据传输至云服务器中;
24、所述充电模块的顶部设置有太阳能充电板,充电模块的底部设置有蓄电池,并且蓄电池位于控制模块的内部。
25、优选的,所述深度学习处理器中采用python语言编程,搭建卷积神经网络,并且采用图像增强技术对抓取机构拍摄的画面进行处理,突出动物的特点;根据图像中动物的特征对动物进行识别,方便摄像模块对设定的需要监控的动物进行范围内的跟踪拍摄,从而提高设备的实用性。
26、本发明的一种野生动物保护区的行踪监控方法,包括以下步骤:
27、s1、对深度学习处理器进行训练,训练过程中为深度处理器提供若干需要监控的动物图像和若干无需监控的动物图像,通过卷积层对图像进行特征提取和卷积运算,识别图像中的模式和结构,通过池化层减小图像的尺寸和复杂度,同时保留重要的特征信息,通过归一化层调节数据的方位、缩放和平移,方便对模型进行输出,通过损失函数计算模型预测结果与真实标签之间的误差,并反向传播更新权重参数,通过优化器使用梯度下降等算法,最小化损失函数,并在训练过程中更新网络参数,训练出可以识别不同动物的模型;
28、s2、将基座、多组支撑柱、遮雨罩、控制模块和充电模块运输至指定位置,通过打地基的方式将基座固定安装于基座上,再将基座、多组支撑柱、遮雨罩、40和充电模块组装在一起;
29、s3、通过电缸收缩,使多组支架向中控模块的中部移动,之后将多组支架伸入至支撑柱的滑槽中,并使多组齿轮均与滑槽内的齿条啮合连接,再通过电缸伸展,使多组支架分别向中控模块的左端和右端移动,使多组第一滚轮与滑槽的内壁接触,之后打开第一电机,使齿轮与滑槽中的齿条啮合传动,对中控模块的高度进行调节,再通过角度调节模块对摄像模块的拍摄角度进行调节,使摄像模块对支撑机构的周围进行拍摄;
30、s4、在拍摄模块拍摄到动物时,根据图像中动物的特征对动物进行识别,判断是否为需要跟踪监控的动物;
31、s5、是需要跟踪的动物时,重复s3中的步骤使摄像模块在拍摄范围内对需要跟踪的动物进行跟踪拍摄;
32、s6、不是需要跟踪的动物时,同样重复s3中的步骤,使摄像模块继续对支撑机构的周围进行拍摄;
33、s7、摄像模块将拍摄到的图像数据传输至控制模块中,控制模块将图像数据传输至云服务器中,云服务器再将图像数据传输至监控室;
34、s8、也可通过监控室将控制命令传输至云服务器,云服务器将控制命令传输至控制模块中,控制模块再将控制命令传输至高度调节模块或摄像模块中,方便工作人员及时收获动物的图像数据,并且方便工作人员远程手动对高度调节模块和摄像模块进行控制;
35、s9、在调节模块电量过低时,高度调节模块直接移动至遮雨罩的内部,使控制模块的充电端插入高度调节模块的充电口中,进行充电;
36、s10、高度调节模块时,可反向重复s3中的步骤将高度调节模块由支撑机构上取下。
37、与现有技术相比本发明的有益效果为:
38、1、通过电缸对多组支架的位置进行调节,方便对高度调节模块进行安装和拆卸;
39、2、通过深度学习处理器配合摄像模块,方便对需要跟踪的动物进行跟踪拍摄,获取较多的动物图像数据;
40、3、通过高度调节模块在支撑机构上移动,方便躲避破坏摄像模块的动物,提高摄像模块的使用寿命;
41、4、方便通过对摄像模块的高度进行调节,扩大监控范围,对地面上、树冠上和空中的动物进行监控;
42、5、摄像模块上包含高清摄像头、红外摄像头和微光摄像头,方便在不同光亮环境中对动物进行清晰拍摄;
43、6、结构简单,方便搭建,降低安装难度。
- 还没有人留言评论。精彩留言会获得点赞!