基于复用反射面的大视场全景成像系统
本发明属于全景光学成像,具体涉及一种基于复用反射面的大视场全景成像系统。
背景技术:
1、全景环带光学系统需要一次性将超大视场范围内的物体经透镜的折射、反射成像到有限大小的图像传感器上,获得超大视场的环形区域图像,在图像中央有一个圆形盲区。
2、这种将超大视场范围内的物体一次性成像到图像传感器上的能力得益于头部单元中折射面、反射面的有机组合,但是,随着成像视场范围的扩大,系统的设计难度大大增加,给设计者带来较大的设计难题;同时,成像视场范围的扩大还可能引起系统体积、质量的增加,不利于系统的小型化、轻量化。
3、公布号为cn110824673a的专利申请公开了一种超大视场全球面全景环带光学系统,包括同轴安装的全景环带头部透镜、置于全景环带头部透镜后方的后继透镜组和传感器,全景环带头部透镜包括从物方到像方依次排列的pal1和pal2,后继透镜组包括从物方到像方依次排列的rl1、rl2、rl3、rl4、rl5、rl6、rl7;其中,pal1、rl1为具有正光焦度的弯月型玻璃透镜,pal2、rl3、rl4、rl5、rl6为具有正光焦度的双凸透镜,rl2、rl7为具有负光焦度的双凹透镜;pal1的凸面朝向物方,凹面朝向像方;rl1凹面朝向物方,凸面朝向像方,所有镜片均由球面玻璃构成,达到在有限像面实现(55°~120°)×360°超大视场一次凝视成像,但是该光学系统仅仅利用一面的光通道。
4、公告号为cn217879793 u的实用新型专利公开了一种全景环带光学系统,包括从物方到像方依次排列的头部单元、后继透镜组和传感器,第一透镜包括前透射面、前反射面和第一后透射面,第二透镜包括后反射面、第二后透射面;后继透镜组包括四片透镜,后继透镜组中至少包括一个胶合透镜,该光学系统的视场角能够达到(40°~100°)×360°,但是视场还不能满足应用需求。
技术实现思路
1、鉴于上述,本发明的目的是提供一种基于复用反射面的大视场全景成像系统,基于复用反射面实现双通道光路成像,以分担传统全景环带结构光路的成像视场范围,以降低大视场全景环带系统的设计难度,进一步提升成像视场。
2、为实现上述发明目的,实施例提供的一种基于复用反射面的大视场全景成像系统,包括:
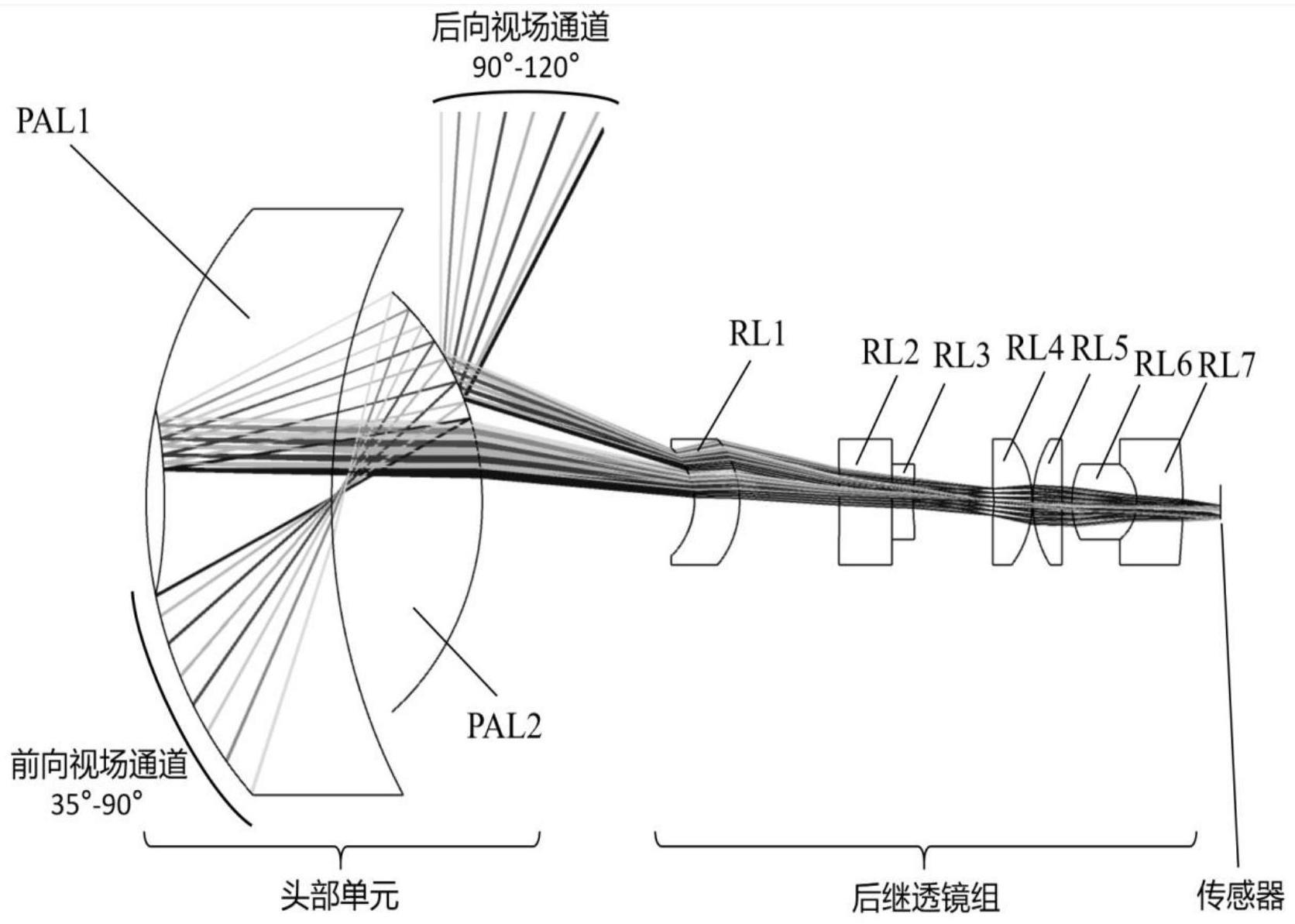
3、包括同轴安装的全景环带头部单元、后继镜组和图像传感器,所述全景环带头部单元包括从物方到像方依次排列的第一透镜(pal1)和第二透镜(pal2);第一透镜(pal1)为具有正光焦度的弯月型透镜,包括前透射面(a1)、前反射面(a6)和第一透射面(a2);第二透镜(pal2)为具有正光焦度的双凸透镜,包括复用反射面(a3)和第二透射面(a8);所述后继镜组包括从物方到像方依次排列的至少2个透镜,所述第二透镜(pal2)的后反射面(a3)能同时对来自玻璃侧和空气侧的光线反射,分别形成前向视场通道和后向视场通道;
4、所述后继镜组包括的第1个透镜(rl1)的物侧面具有中心圆形区域(s1)和外圈圆环区域(s2),中心圆形区域(s1)和外圈圆环区域(s2)为面型参数不同的两个偶次非球面,分别对来自前向视场通道和后向视场通道的光线产生偏折作用;
5、所述大视场全景成像系统能实现(35°~120°)×360°成像视场范围。
6、优选地,所述第1个透镜(rl1)的中心圆形区域(s1)和外圈圆环区域(s2)的面型参数通过以下方式设计:
7、构建旋转对称偶次非球面的面型参数z(r)的设计公式:
8、
9、其中,z是表面矢高,表示面上任意一点和顶点沿光轴方向的坐标值的差,r1是内、外两个非球面分界处的径向坐标,r2是外圈圆环区域(s2)的最大径向坐标,c1,c2分别是内、外非球面在顶点处的曲率值,k1、k2分别是内、外非球面的圆锥系数,ai、bj(i,j=4,6,8,……,16)分别是内、外非球面的高阶非球面系数;
10、在r=r1处,rl1的物侧面的矢高发生了微小突变,突变量的表达式为:
11、
12、来自前向视场通道的光线经rl1的中心圆形区域(s1)折射,这些光线和中心圆形区域(s1)有一系列交点,其中径向坐标值最大的交点记为q1,来自后向视场通道的光线经rl1的外圈圆环区域(s2)折射,这些光线和外圈圆环区域(s2)有一系列交点,其中径向坐标值最小的交点记为q2,q1、q2的径向坐标分别为和对光线的落点位置进行约束,以满足:
13、
14、前向视场通道的光线经过第一透射面(a2)折射,复用反射面(a3)反射和前反射面(a6)反射,第二透射面(a8)透射后进入后继镜组,后向视场通道的光线经过复用反射面(a3)的反射进入后继镜组,前向视场通道的光线和复用反射面(a3)有一系列交点,其中径向坐标值最小的记为p1,后向视场通道的光线与复用旋转反射面(a3)也有一系列交点,设其中径向坐标值最小的记为p2,来自前向视场通道的光线与第二透镜pal2的中心透射区域(a8)有一系列交点,其中径向坐标值最大的记为p3,为了避免两通道光线的遮挡,p1、p2、p3的径向坐标值应满足以下约束条件:
15、
16、来自前向视场通道、视场角为35°和90°的光线和像面上的r轴的交点分别记为p4和p5,来自后向视场通道、视场角为90°和120°的光线和r轴的交点分别记为p7和p6,两个通道的像不能重叠,即点p5和p6之间要留有一定间隔,需要控制点p5和p6的径向坐标和满足以下约束条件:
17、
18、优化时,以δz(r1)趋近于0为目标,在评价函数中添加(3)-(6)式约束条件,对z(r)进行参数优化,经过参数优化后确定s1和s2的面型参数。
19、优选地,所述第一透镜(pal1)的物侧面曲率半径像侧面曲率半径满足如下关系:
20、优选地,所述第二透镜(pal2)的物侧面曲率半径像侧面曲率半径满足如下关系:
21、优选地,所述全景环头部单元的总长度ttl头部和所述后继镜组的总长度ttl后继镜组满足如下关系:
22、优选地,所述后继镜组包括从物方到像方依次排列的7个透镜,分别为rl1、rl2、rl3、rl4、rl5、rl6和rl7,其中,rl1、rl3、rl4、rl5、rl7为弯月形透镜,rl2为双凹透镜,rl6为双凸透镜。
23、优选地,所述pal1和pal2胶合在一起,使得第二透镜(pal2)具有一透射面(a2)。
24、优选地,所述rl2和rl3胶合在一起,所述rl6和rl7胶合在一起。
25、与现有技术相比,本发明具有的有益效果至少包括:
26、基于全景环带头部单元中第二透镜(pal2)的后反射面(a3)能同时对来自玻璃侧和空气侧的光线反射,分别形成前向视场通道和后向视场通道,配合第1个透镜(rl1)的物侧面具有中心圆形区域(s1)和外圈圆环区域(s2)分别对来自前向视场通道和后向视场通道的光线产生的偏折作用,并在后继镜组中经过校正像差,成像在传感器面,进而分担传统全景环带结构光路的成像视场范围,降低全景环带系统头部单元的设计难度,使得大视场全景成像系统能实现(35°~120°)×360°成像视场范围。
- 还没有人留言评论。精彩留言会获得点赞!