一种无人机机载智能反射面辅助6G网络动态部署方法
本发明涉及无线通信网络领域,特别涉及网络规划、网络规划工具,无人机载智能反射表面(unmanned aerial vehicle-mounted intelligent reflecting surface,uav-irs)辅助灾区应急通信网络的系统部署及应用方法。
背景技术:
1、随着世界各地区地震、山体滑坡等自然灾害频发,为了提高救援效率,保障自然灾害地区的通信一直是一个迫切而又重要的问题。为了保证紧急情况下的搜救效率,数据传播和蜂窝网络覆盖是必不可少的。
2、为了克服地面车辆的通行障碍,现有灾区应急通信的主要手段之一是利用uav基站(uav base station,uav-bs)。凭借uav-bs高动态和高视距特性,通过部署固定或者按照设计的轨迹飞行的uav-bs,可以为灾区提供高质量通信服务。然而,虽然静止系留uav-bs可以长时间悬浮,但是其服务范围有限,需要部署多个uav-bs以满足整个灾区通信,成本太高。移动的uav-bs因为其回程容量受限,难以支持大容量、高并发通信服务。因此,如何充分发挥uav在区域通信的优势还有待进一步研究。
3、幸运的是,随着近年来超材料的发展,新兴的智能反射表面(intelligentreflecting surface,irs)凭借其无源、可重构信道环境的特性,成为新一代有潜力的通信技术。通过设置合适的irs相位,在一定范围内,irs可以反射入射信号,并使其在接收端同相叠加以增强接收信噪比。irs的优异能力已经在密集城区通信、物联网、边缘计算、物理层安全等各种场景中被验证,然而irs也存在服务范围有限的局限性。uav搭载irs不仅可以充分利用uav的敏捷特性,还可以扩大irs的服务能力。因此,uav-irs不失为一种解决区域用户通信难题的有潜力方案。
技术实现思路
1、本文构建了一种新的区域通信系统,其中uav-irs作为无源通信中继,在某一特定高度飞行,通过反射远处未被破坏的地面基站(ground base station,gbs)的信号为区域多用户提供服务。为了保证区域内所有用户的通信,区域用户的传输速率需要满足一定断线率。在此基础上,我们构建了区域用户最小速率最大化问题,设计了解决方案,获得了irs的传输调度方案和uav的飞行轨迹,通过仿真验证了所提出算法的有效性。
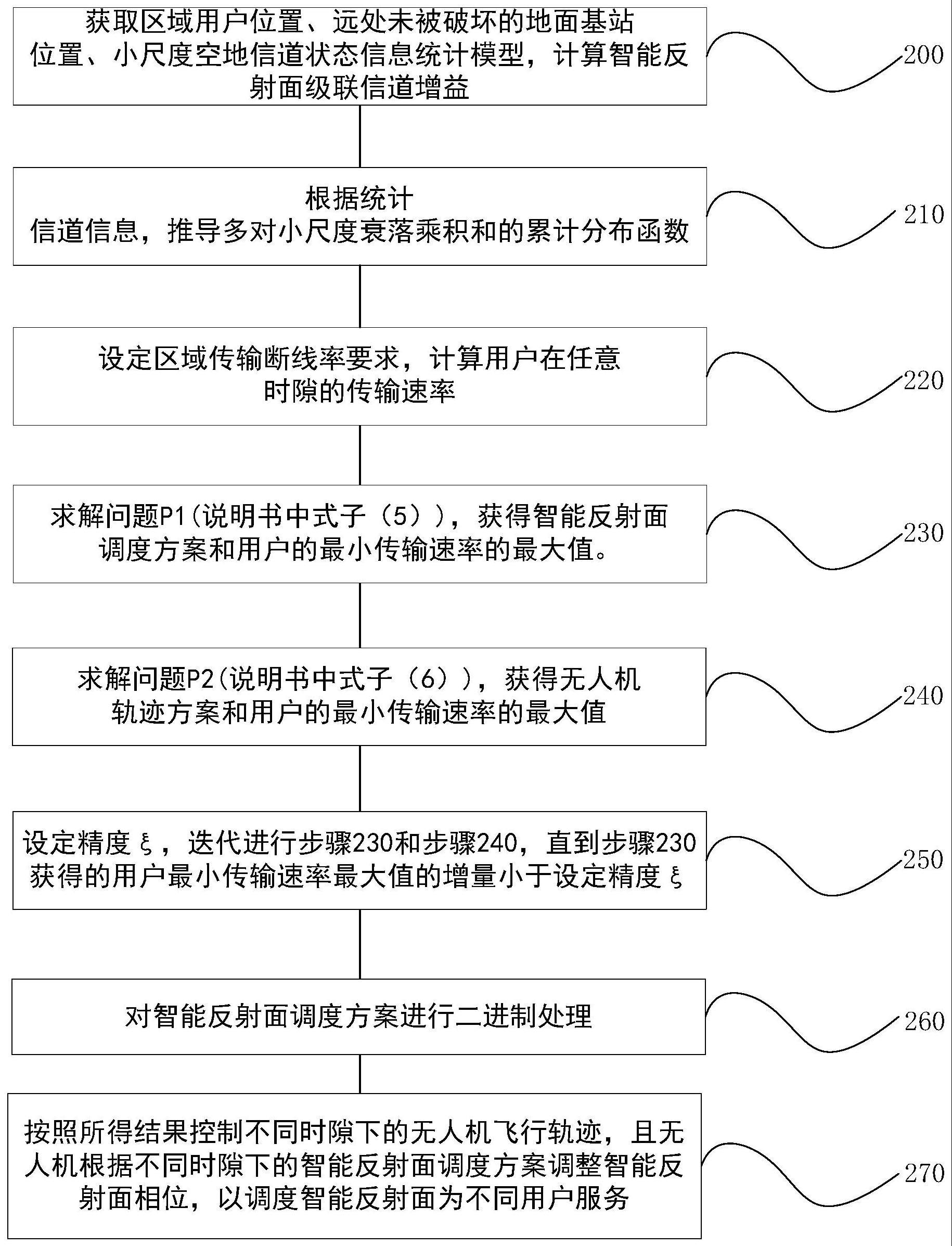
2、本发明的无人机智能反射面辅助网络的动态部署方法如附图1所示,主要包括步骤200-步骤270,其中,步骤200-步骤260为控制中心计算步骤,步骤270为uav实际操作步骤。
3、步骤200,获取用户位置、远处未被破坏的gbs位置、小尺度空地信道状态信息统计模型,计算irs级联信道增益。
4、通过公式(1)计算gbs至用户设备(user equipment,ue)的irs级联信道增益。
5、
6、其中,各个参数定义如下:
7、m为时隙指示符号;
8、l为每个时隙中的信道衰落块指示符号;
9、k为用户指示符号;
10、i为irs单元指示符号;
11、n为irs的单元数量;
12、为在第m个时隙的第l个衰落块中,gbs与ue k的irs级联信道增益,该信道增益包含大尺度路径损耗和小尺度信道衰落;
13、为在第m个时隙的第l个衰落块中,irs的第i个单元与用户k的信道增益,该信道增益包含大尺度路径损耗和小尺度信道衰落;
14、为在第m个时隙的第l个衰落块中,gbs与irs的第i个单元的信道增益,该信道增益包含大尺度路径损耗和小尺度信道衰落;
15、γi,k[m]为在第m个时隙中,irs的第i个单元对用户k信号的幅度和相位调整因子,其形式为ai,k[m]为幅度调整因子,为相位调整因子。
16、进一步,根据获得的信道状态信息和根据公式(2)设定irs单元相位。
17、
18、其中,分别为gbs与irs的信道增益的相位、irs与用户k信道增益的相位。
19、步骤210,根据获得的信道状态信息和在nakagami-m衰落信道模型条件下,依据公式(3)推导累计分布函数f-1(·),ci为gbs至irs的第i单元的小尺度衰落,di为ue至irs的第i单元的小尺度衰落。
20、
21、其中,(a)l为pochhammer符号,a!表示a的阶乘,ka(·)为第二类a阶修正贝塞尔函数,m1,ω1为gbs至irs的信道衰落参数,m2,ω2为gbs至irs的信道衰落参数。
22、步骤220,设定灾区应急传输断线率要求ε,根据公式(4)计算用户k在第m个时隙的传输速率。
23、
24、其中,
25、k为用户指示符号;
26、m为时隙指示符号;
27、rk[m]为用户k在第m个时隙的传输速率;
28、p为gbs发射功率;
29、β0为单位距离的传播路径损耗;
30、σ2为高斯白噪声功率密度;
31、α为路径损耗指数;
32、hr,hb,hu分别为irs高度,gbs高度和ue高度;
33、dbr[m]为第m个时隙中,irs与gbs的空间距离;
34、为第m个时隙中,irs与ue k的空间距离;
35、f-1(·)为ci和di的乘积和的累计分布函数的逆函数,ci为gbs至irs的第i单元的小尺度衰落,di为ue至irs的第i单元的小尺度衰落,可根据公式(3)计算获得。
36、步骤230,求解下述问题p1(式子(5)),获得irs调度方案和用户的最小传输速率的最大值η。即a={ak[m]}irs调度策略,在任意时刻m,gbs调度irs为用户k服务。其中,ak[m]∈{0,1},ak[m]=1表示在时隙m中,gbs调度irs为用户k服务;否则,irs在时隙m不为用户k服务。
37、
38、其中,m为uav飞行的总时隙数量,k为总用户数量。注意,求解获得的可能不满足约束ak[m]∈{0,1},因此需要进一步处理,这将在步骤260中进行讲述。注意,在求解p1的时候,需要给定uav轨迹在第一次求解p1时,uav轨迹可随机选取一个可行轨迹,此后的uav轨迹由步骤240求解获得。
39、步骤240,求解下述问题p2(式子(6)),获得uav轨迹方案和用户的最小传输速率的最大值η。注意,本文uav的飞行始终处于某一固定高度,该高度可以选取该区域安全飞行的最低高度以降低路径损耗。
40、
41、其中,q0为uav飞行的起始和降落地点,dmax为两个相邻时隙uav可以移动的最大距离。为rk[m]在某一uav轨迹点的下界函数,且是的凸函数。注意,在求解p2的时候,需要给定irs调度方案在第一次求解p2时,irs调度方案可随机选取一个可行调度方案,此后的irs调度方案由步骤230求解获得。
42、步骤250,设定精度ξ,迭代进行步骤230和步骤240,直到步骤230获得的用户最小传输速率最大值η的增量小于设定的精度ξ。此时,我们可以获得irs调度方案和uav轨迹方案请注意,此时获得的irs调度方案可能不满足约束ak[m]∈{0,1},需要进行二进制处理,我们将在步骤260进行讲述。
43、步骤260,对进行二进制处理。我们可以进一步将每个时隙划分为χ个子时隙,则总时隙为m'=χm。那么在时隙m中,可以分配个子时隙给用户k进行传输,表示离x最近的整数。可知,χ选取得越大,与χ×ak[m]的差距就越小。但是需要注意的是,χ越大会造成uav轨迹规划的不准确性越大,因此χ的选择需要权衡考虑。至此,我们获得了最终的irs调度方案和uav轨迹方案
44、步骤270,按照所得结果控制不同时隙下的uav飞行轨迹,且uav根据不同时隙下的irs调度方案调整irs相位,以调度irs为不同用户k服务。
45、有益效果
46、本发明的无人机智能反射面辅助网络的动态部署方法,建立了保障区域多用户通信的宏观流程框架,给出了多用户下的irs调度服务方案和uav轨迹规划方案。具体地,构建了double-nakagami-m的bs-ies-ue级联信道模型,推导了级联信道增益的累积分布函数,并利用块坐标下降和连续凸优化技术设计了低复杂度irs调度和uav轨迹设计算法。此外,我们根据现实中的场景参数,构建了仿真场景,并进行了大量仿真与比较。我们详细分析了uav-irs在整个飞行过程中的状态,包括互相对应地飞行速度和irs调度,这验证了所提方案的可有效性。我们进一步将所提算法和四种基线方案进行了对比,对比结果显示了所提算法的优越性。
- 还没有人留言评论。精彩留言会获得点赞!