小区域光信号快速捕获方法、系统、装置和存储介质与流程
本发明涉及星间激光通信捕获,具体为一种天线散射覆盖范围内的小区域光信号快速捕获方法、系统、装置和存储介质。
背景技术:
1、随着低轨卫星搭载轻小型低功耗小体积通信载荷以及卫星组网通信日益增长的技术需求,空间激光通信中以信号光束扫描覆盖不确定区域的无信标捕获与跟踪技术为代表的新型捕获跟踪策略应运而生。空间激光通信系统中常采用的扫描方式有光栅扫描、螺旋扫描、光栅螺旋扫描、玫瑰扫描、李萨如扫描。
2、光栅扫描的扫描轨迹像矩形一样,因此其又称矩形扫描,该扫描方式为从不确定区域四个顶角中的任意一个顶角开始对整个待扫描区域进行逐行扫描,并选取一定的覆盖角度,该行扫描完成后向上或向下(以扫描的位置决定方向)进行跳步后,开始反方向对此行进行扫描,以此往复,直至扫描轨迹覆盖整个不确定区域,光栅扫描的优点是工程上易于实现、执行过程简单且可以良好的覆盖整个不确定区域。缺点是不管从哪个顶角开始扫描,都是从捕获概率较低的点开始扫描,导致捕获效率较低,捕获时间较长。且扫描轨迹类似矩形,为了覆盖近似于圆形的捕获不确定区域,会浪费一些扫描时间在矩形的四个角的区域上,从而使整个扫描时间增加。
3、螺旋扫描就是跟据螺旋线的方式对整个不确定区域进行覆盖的扫描方式。因其扫描从目标出现概率最高的中心点开始,所以这种扫描的捕获效率最高。如申请公布号为cn115396020a的专利文献公开了一种星载激光通信终端的光斑快速捕获方法及系统缩短扫描捕获时间,增大扫描捕获概率,该方法为确定扫描不确定区域,将其划分为多个等步长的螺旋扫描子区域,每个扫描子区域的中心点为一个螺旋点;规划压电陶瓷偏摆镜(pzt)在扫描子区域内的扫描路径,控制pzt对该扫描子区域进行精扫描,如捕捉到光斑,则扫描结束;如该扫描子区域已扫描完毕,仍未捕捉到光斑,则控制电机按等步长螺旋扫描线走点至下一个扫描子区域的中心点,进行粗扫描,如电机走点后捕获到光斑,则扫描结束;如未捕捉到光斑,则规划pzt在当前扫描子区域内的扫描路径,控制pzt对该扫描子区域进行精扫描,如此反复,直至捕捉到光斑或电机完成全部螺旋走点。螺旋扫描的缺点是为了完全覆盖整个不确定区域需要增加相邻扫描点的重叠区域,重叠区域过大虽可以提高捕获成功率,但会增加扫描时间,同时随着扫描圈数增多,扫描死区也会越来越大,捕获概率也并不确定,如申请公布号为cn115396020a的专利文献就公开了一种针对螺旋扫描的针对螺旋扫描的粗精复合扫描的捕获概率获取方法来准确衡量捕获能力。
4、光栅螺旋扫描也称矩形螺旋扫描。该扫描兼顾了光栅扫描与螺旋扫描的优点,从捕获概率密度高的中心点开始扫描,覆盖均匀性好、扫描效率高且不存在死区。缺点因其拐点较多,转台在改变扫描方向的过程中需要多次的进行启停操作,存在突然加减速的现象,因此对驱动电机执行精度提出了很高的要求。工程上常采用的方法是将扫描过程离散化,在扫描算法中采用设计二维数组的方式完成光栅螺旋的跳步过程。
5、当然除了上述三种扫描外,还有玫瑰扫描、李萨如扫描。玫瑰扫描由于每组扫描都从中心处出发,因此受卫星平台振动影响相对较少更加适合星载平台应用;李萨如扫描能够十分有效地扫描整个不确定区域。但是这两种扫描方式在扫描过程中存在死区,且工程上难以实现。
6、由于无信标捕获系统束散角过小,如果采用带宽较低的伺服转台进行扫描覆盖,需要过长的时间,因此为了实现无信标的快速捕获采用伺服带宽高的振镜实现不确定区域的快速扫描。但受振镜执行范围的限制,如果不确定区域过大,仅采用振镜扫描便无法覆盖整个不确定区域,针对此问题提出采用潜望式粗伺服转台与精跟踪振镜相互配合的复合扫描方式,这种扫描方式可以看成采用若干个子区域覆盖不确定区域的过程。但是目前所用的所有激光建链方法都是基于稳定不变的光束传输大小。当目标距离较远,分布不确定的情况下,建链搜寻时间将极大的提高,不利于持续稳定建链。
7、并且目前在经过恒星定标后,实际使用建链过程中,通常存在1-5mrad的定标误差等,通过传统方法,按照现有30-50urad的信号光,在1mrad不确定区域的捕获效率为10s左右,不确定区域越大,捕获时间更是呈指数倍增加。
技术实现思路
1、针对现有技术的不足,本发明提供了一种天线散射覆盖范围内的小区域光信号快速捕获方法、系统、装置和存储介质,以解决上述现有技术中当目标距离较远时捕获时间和建链搜寻时间长的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:
3、一种天线散射覆盖范围内的小区域光信号快速捕获方法,所述方法包括:
4、s1.通过采用空间光调制器件的波前调制实现对光束的整形偏转,完成对5-10mrad区域的快速全覆盖;
5、s2.根据目标距离采用不同的方法对光信号进行快速捕捉:在距离1000km以内的近区域使用激光发散角扩束方法实现不确定区域的全覆盖;在距离1000km及以上的远区域有序的针对不同距离,采用不同的发散角扩束配合空间光调制器的捷变缩小扫描实现快速捕获跟踪。
6、优选的,所述使用激光发散角扩束方法为方形光斑矩形扫描方式完成区域扫描。
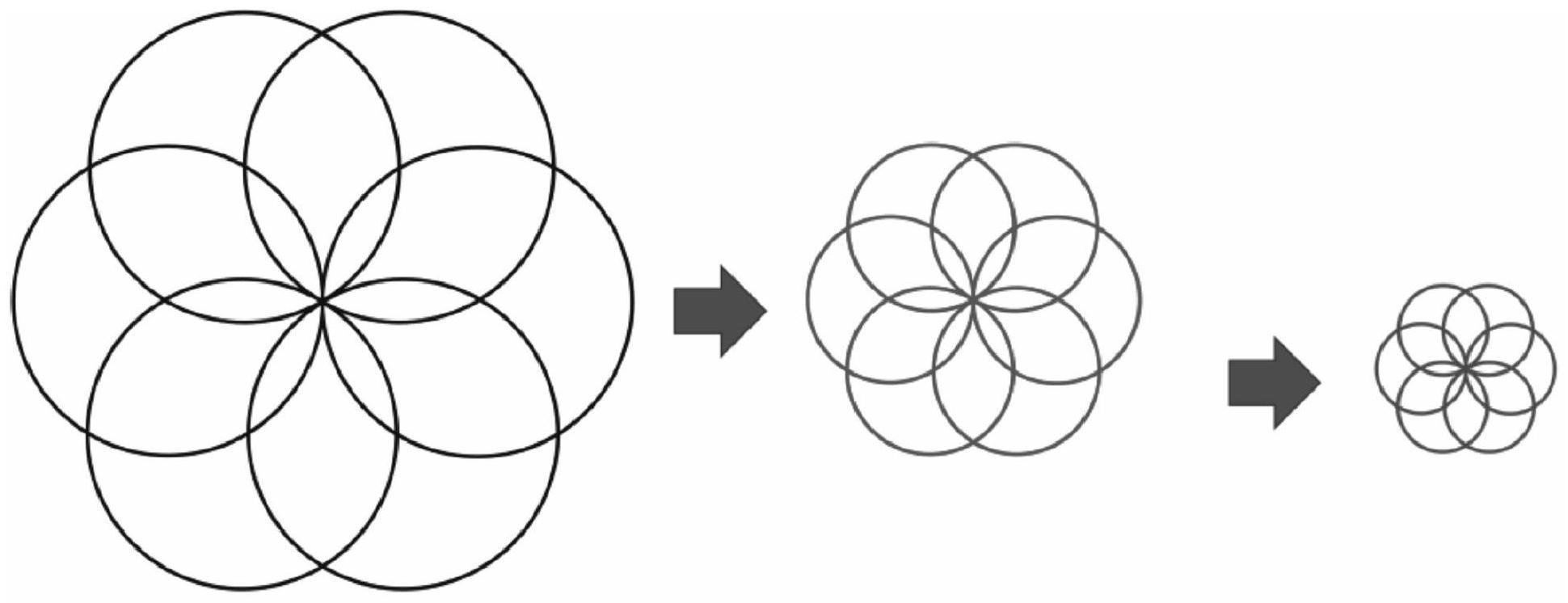
7、优选的,所述采用不同的发散角扩束配合空间光调制器的捷变缩小扫描方法为采用圆形光斑花瓣旋转式扫描路径,对光斑的缩小捷变实现快速捕获跟踪。
8、优选的,采用圆形光斑花瓣旋转式扫描路径,对光斑的缩小捷变实现快速捕获跟踪的方法具体包括:
9、s2.1先使发射光束在目标端面具有大光斑尺寸,采用花瓣旋转式扫描路径快速确立出射光线的大致范围;
10、s2.2在链路建立过程中,通过波前调制不断汇聚光束在接收端面的光斑尺寸直至光斑尺寸小于指定阈值;
11、s2.3结合卫星运行轨道和速度数据参数,采用空间光调制器对出射激光信号光束的指向和预聚焦预补偿进行动态预估,结合激光整形偏转模组瞬态控制,对波前调控快速更新。
12、优选的,所述花瓣旋转式扫描路径具体为以不确定区域直径中心为花瓣扫描中心,以不确定区域一半的束散角以花瓣旋转步长iθ旋转。
13、优选的,所述不断汇聚光束在接收端面的光斑尺寸直至光斑尺寸小于指定阈值具体为通过减小束散角来不断汇聚光束在接收端面的光斑尺寸,所述光束束散角α递减公式为
14、α=σ(mrad)×mn
15、其中,σ为第一次扫描光斑的束散角,m取值范围0.2~0.6,n为已扫描次数,所述光斑尺寸指定阈值为光束束散角小于70μrad时的光斑尺寸。
16、优选的,所述单步花瓣扫描步长iθ与发射光束束散角α关系表达式为
17、
18、其中,x为补偿星上微振动设置的重叠量,θ为激光束散角变化值即前后束散角差值θ=δα=α1-α2。
19、基于同一发明构思,本方案还提供一种天线散射覆盖范围内的小区域光信号快速捕获系统,包括gps定位获取装置、空间光调制器,所述gps定位获取装置,用于获取从端机的大致位置,所述空间光调制器包括激光相位调制模块和固定焦距匹配透镜,通过激光相位调制模块构建变焦透镜,与固定焦距匹配透镜离焦配合,实现对激光束散角大小的控制和控制光束的整形偏转,按上述任一项所述的天线散射覆盖范围内的光信号快速捕获方法对光信号进行捕获。
20、基于同一发明构思,本方案还提供一种天线散射覆盖范围内的小区域光信号快速捕获装置,包括存储器和处理器,所述储存器,用于存储计算机程序,所述处理器,用于当执行所述计算机程序时,实现如上述任一项所述的天线散射覆盖范围内的光信号快速捕获方法。
21、基于同一发明构思,本方案还提供一种计算机可读的存储设备,所述存储设备存储有计算机程序,所述计算机程序被执行时实现如上述任一项所述的天线散射覆盖范围内的光信号快速捕获方法。
22、本方案相对于现有技术,有益效果在于:本方案基于激光波前调制技术运用于空间激光通信终端无信标捕获,采用激光整形偏转模组自身的扫描方式,不需要转台的配合,仅仅依靠对激光的波前调制对不确定区域进行扫描和全覆盖,并且后续建链后,通过空间光调制器稳定维持,并反馈转台移动至光轴的中心位置,保证最佳的信号传输效果,其后开始信号的传输互联,工作方式简单;对于激光整形偏转模组可以覆盖的系统,因螺旋扫描自身的缺点,扫描圈数的增加,扫描死区会越来越多,而通过将不确定区域划分为多个圆形子区域,每个子区域中旋转扫描的圈数更小,减少了扫描圈数,也就减少了扫描死区,而通过波前调制不断汇聚光束在接收端面的光斑尺寸,不但可以用于链路的精确建立,还可以达到提升链路信噪比的效果,整体方案会有更高的捕获概率,并达到更快的建链时间,1000km内的近距离下建链时间优于1s,1000km以上的远距离下建链时间可以低至5s,远优于现有技术的1mrad不确定区域就需要10s;基于波前调制技术的星间激光指向方向链路搜寻建立策略基于现有望远镜头约5-10mrad的可支持发散角,结合卫星运行轨道和速度数据参数,采用空间光调制器对出射激光信号光束的指向和预聚焦预补偿进行动态预估,结合激光整形偏转模组瞬态控制,对波前调控快速更新,可以为下一步激光通信链路的建立提供支撑;基于激光波前调制方法的激光建链,同样还能用于激光的高质量动态传输,基于对激光各项参数的调节实现激光链路的优化,通过对光路的预聚焦和预补偿实现信噪比的提升。
- 还没有人留言评论。精彩留言会获得点赞!