基于BIM和UWB的地铁车辆检修作业系统及方法与流程
本技术属于地铁管理,特别涉及基于bim和uwb的地铁车辆检修作业系统及方法。
背景技术:
1、地铁车辆检修作业涉及地铁车辆设备的常规检修,常见设备故障的处理与排除,故障检修记录,设备的备件更换、数据装载、保养维护;地铁站、地铁运行隧道等地铁运行环境的日常维护、勘察、巡视,是保障地铁车辆正常运行的重要工作。目前地铁车辆检修作业管理日趋规范化、自动化、数字化,尤其是数字建模等技术的应用,为地铁车辆检修作业提供了先进的技术保障。超宽带uwb技术采用了宽带脉冲通讯,信号传递过程中有着很强的抗干扰能力,信号对其它设备的影响较低,因此uwb技术定位较为准确,一般精度在分米级,在通常情况下能够符合常规的室内定位的应用。建筑信息模型bim是利用数字化技术,为模型提供完整的、与实际情况一致的建筑工程信息库,借助这个包含建筑工程信息的三维模型,有效提高建筑工程的信息集成化程度以及数字化应用程度。现有技术中,上述两种技术结合使用,可实现地铁车辆检修作业的模型及目标可视化。例如cn214960127u将uwb定位技术与地铁隐蔽管线的bim三维建模技术集成,在一定程度上实现了检修模型可视化及模型中目标定位及跟踪。然而现有技术仍然存在以下问题:bim模型通常根据设计图数据进行建模,然而处于误差范围内的实际物体尺寸均是合格尺寸,因此会引进一定的模型误差;而uwb定位信息的虽然理论精确度符合实际使用需求,然而要达到理论精确度,对于基站信号设备的要求极大,即使发生纳秒级的小时间量的设备同步误差,也会引入大约20-50dm的定位误差。对于常规室内定位,设备同步误差是可控的,然而对于地铁车辆检修的特殊环境,其作业距离较长、可能存在弯曲阻挡信号情况、可能存在复杂的障碍物等特殊环境情况,从而导致定位基站设备需求数量多,不易设定最佳信号测量位置,造成定位基站设备应用复杂,难以控制设备同步误差,因而会引入不可忽视的定位误差。bim模型与uwb定位技术的精确度在地铁车辆检修作业的应用中均不理想,尤其是模型数据及定位信息的耦合更加增大了误差范围,这为精细检修定位带来困难;进一步地由于精细检修定位误差较大,bim三维模型中对待维修对象的目标缺陷的可视化呈现的用户体验较差。
2、为了至少解决上述现有技术存在的问题中的一个或多个,更优的地铁车辆检修作业方案亟待研究。
技术实现思路
1、针对现有技术存在的问题,本发明提供基于bim和uwb的地铁车辆检修作业方法,其具体为:
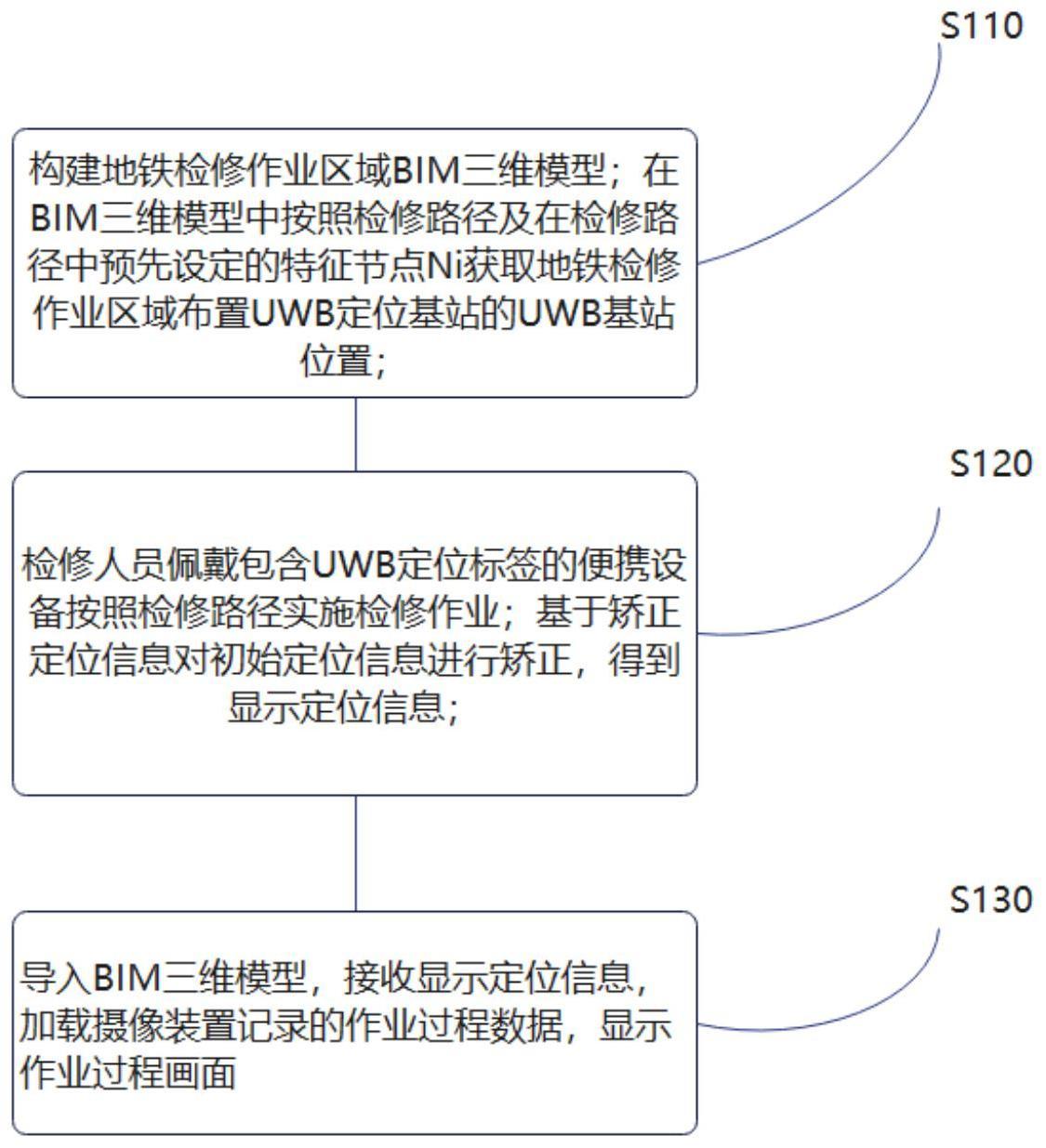
2、s110:构建地铁检修作业区域bim三维模型,在bim三维模型中按照检修路径及在检修路径中预先设定的特征节点ni获取地铁检修作业区域布置uwb定位基站的uwb基站位置,在bim三维模型中基于所述uwb基站位置进行标注,在地铁检修作业区域基于所述uwb基站位置布置uwb定位基站;
3、s120:检修人员佩戴包含uwb定位标签的便携设备按照检修路径实施检修作业,uwb定位基站接收测量uwb定位标签的脉冲信号,完成飞行时差测距定位,得到初始定位信息;所述便携设备至少包含摄像装置,摄像装置记录作业过程,同时,当检修人员行至特征节点ni附近时,将摄像装置中显示的定位框对准uwb定位基站,使得uwb定位基站位于定位框内,基于定位框与uwb定位基站位置关系,计算得到矫正定位信息;基于矫正定位信息对初始定位信息进行矫正,得到显示定位信息;
4、s130:服务器端导入bim三维模型,接收显示定位信息,加载摄像装置记录的作业过程数据,基于显示定位信息在bim三维模型中进行标注并实时刷新显示定位信息进行跟踪操作;触发显示作业过程的操作后,加载并显示作业过程画面。
5、进一步地,所述s110中,在bim三维模型中按照检修路径及在检修路径中预先设定的特征节点ni获取地铁检修作业区域布置uwb定位基站的uwb基站位置具体为:
6、(1)依据检修需求在bim三维模型中设置检修路径,设置检修路径所经过的三维模型特征节点ni(1≤i≤k,k为特征节点数量);
7、(2)设置经过特征节点ni且与检修路径垂直的切面,该切面与bim三维模型相交形成相交面;若i=1,则取切面与bim三维模型相交面中的两个交点nia、nib作为uwb定位基站布置点,其中,两个交点ni1、ni3处于相交面的边缘且中心对称;若i>1;则取切面与bim三维模型相交面中的两个交点ni1、ni3作为uwb定位基站布置点,其中,两个交点nia、nib处于相交面的边缘且中心对称,并且,nia与nib所确定出的直线与n(i-1)a与n(i-1)b所确定出的直线在空间上垂直。
8、(3)若i<k,则令i=i+1,继续执行上述步骤(2);若i=k,uwb定位基站布置完毕。
9、进一步地,所述s110中所述特征节点ni的设定方法为:在检修作业复杂区域附近设置特征节点;和/或在uwb定位标签的脉冲信号失真严重区域附近设置特征节点;和/或到上个特征点节的位置的距离接近uwb脉冲信号测量距离阈值的附近设置特征节点。
10、进一步地,在所述步骤110中,为所述布置的uwb定位基站设置显著标识;在所述步骤s120中所述将摄像装置中显示的定位框对准uwb定位基站,使得uwb定位基站位于定位框内具体为:定位框与uwb定位基站的数量均为2,图像采集模型自动识别显著标识以捕捉uwb定位基站位于定位框内的图像;计算得到2个uwb定位基站的双景深信息,将双景深信息转化为uwb定位基站与检修人员的距离信息,即为矫正定位信息。
11、进一步地,交点位置nia、nib、n(i-1)a、n(i-1)b两两连接构成四面体,在检修空间中形成三维空间uwb定位基站;在除交点位置nia、nib、n(i-1)a、n(i-1)b以外的其它uwb定位基站的信号无失真或少失真的情况下,基于所述其它uwb定位基站进行辅助定位;否则仅基于交点位置nia、nib、n(i-1)a、n(i-1)b的uwb定位基站进行定位。
12、还提供一种基于bim和uwb的地铁车辆检修作业系统,其特征在于,包括:
13、构建单元,用于构建地铁检修作业区域bim三维模型,在bim三维模型中按照检修路径及在检修路径中预先设定的特征节点ni获取地铁检修作业区域布置uwb定位基站的uwb基站位置,在bim三维模型中基于所述uwb基站位置进行标注,在地铁检修作业区域基于所述uwb基站位置布置uwb定位基站;
14、定位单元,检修人员佩戴包含uwb定位标签的便携设备按照检修路径实施检修作业,uwb定位基站接收测量uwb定位标签的脉冲信号,完成飞行时差测距定位,得到初始定位信息;所述便携设备至少包含摄像装置,摄像装置记录作业过程,同时,当检修人员行至特征节点ni附近时,将摄像装置中显示的定位框对准uwb定位基站,使得uwb定位基站位于定位框内,基于定位框与uwb定位基站位置关系,计算得到矫正定位信息;基于矫正定位信息对初始定位信息进行矫正,得到显示定位信息;
15、后台单元,服务器端导入bim三维模型,接收显示定位信息,加载摄像装置记录的作业过程数据,基于显示定位信息在bim三维模型中进行标注并实时刷新显示定位信息进行跟踪操作;触发显示作业过程的操作后,加载并显示作业过程画面。
16、进一步地,所述构建单元中,在bim三维模型中按照检修路径及在检修路径中预先设定的特征节点ni获取地铁检修作业区域布置uwb定位基站的uwb基站位置具体包括:
17、(1)节点设置单元,用于依据检修需求在bim三维模型中设置检修路径,设置检修路径所经过的三维模型特征节点ni(1≤i≤k,k为特征节点数量);
18、(2)基站设置单元,用于设置经过特征节点ni且与检修路径垂直的切面,该切面与bim三维模型相交形成相交面;若i=1,则取切面与bim三维模型相交面中的两个交点nia、nib作为uwb定位基站布置点,其中,两个交点ni1、ni3处于相交面的边缘且中心对称;若i>1;则取切面与bim三维模型相交面中的两个交点ni1、ni3作为uwb定位基站布置点,其中,两个交点nia、nib处于相交面的边缘且中心对称,并且,nia与nib所确定出的直线与n(i-1)a与n(i-1)b所确定出的直线在空间上垂直。
19、(3)循环单元,用于检查i,若i<k,则令i=i+1,继续执行上述步骤(2);若i=k,uwb定位基站布置完毕。
20、进一步地,所述构建单元中,所述特征节点ni的设定方法为:在检修作业复杂区域附近设置特征节点;和/或在uwb定位标签的脉冲信号失真严重区域附近设置特征节点;和/或到上个特征点节的位置的距离接近uwb脉冲信号测量距离阈值的附近设置特征节点。
21、进一步地,在所述构建单元中,为所述布置的uwb定位基站设置显著标识;在所述定位单元中,所述将摄像装置中显示的定位框对准uwb定位基站,使得uwb定位基站位于定位框内具体为:定位框与uwb定位基站的数量均为2,图像采集模型自动识别显著标识以捕捉uwb定位基站位于定位框内的图像;计算得到2个uwb定位基站的双景深信息,将双景深信息转化为uwb定位基站与检修人员的距离信息,即为矫正定位信息。
22、进一步地,交点位置nia、nib、n(i-1)a、n(i-1)b两两连接构成四面体,在检修空间中形成三维空间uwb定位基站;在除交点位置nia、nib、n(i-1)a、n(i-1)b以外的其它uwb定位基站的信号无失真或少失真的情况下,基于所述其它uwb定位基站进行辅助定位;否则仅基于交点位置nia、nib、n(i-1)a、n(i-1)b的uwb定位基站进行定位。
23、本发明提供了基于bim和uwb的地铁车辆检修作业系统和方法,采用上述系统和方法可至少达到以下效果:(1)针对地铁车辆检修作业区域的特殊环境设置了新颖的地铁车辆检修作业的uwb定位基站安装及使用方法和系统,结合bim模型的应用,显著提高了定位精确度;(2)在检修作业过程中对uwb定位进行矫正,将定位矫正操作与检修作业记录相结合,在提高了定位精确度的同时,为远程指挥和监控提供了检修作业过程的关键数据,提高了地铁车辆检修作业系统前端及后端整体用户体验。
- 还没有人留言评论。精彩留言会获得点赞!