一种通感一体化系统资源分配及无人机轨迹规划方法
本发明属于无线通信,涉及一种通感一体化系统资源分配及无人机轨迹规划方法。
背景技术:
1、通感一体化技术基于软硬件资源及信息共享协同实现感知与通信功能,可以有效提升系统频谱效率、硬件利用率和信息处理效率。无人机因具有高度灵活性、通信范围广等优点,在未来有望成为一个有前景的空中联合通信感知平台。在无人机上实现通信和感知技术融合,可实现无人机在物理空间上的高精度协作感知业务。无人机的通信感知一体化是指通过空口及协议联合设计、时频空资源复用、硬件设备共享等手段,实现通信与感知功能统一设计,使无线网络在进行高质量通信交互的同时,实现高精度、精细化的感知功能,实现网络整体性能和业务能力的提升。为了进一步提升无人机的感知精度,可将无人机的控制与感知结合起来。因此,如何在同时满足通信、感知和控制约束的情况下,优化设计资源分配策略和无人机轨迹方案,实现系统整体性能优化成为亟待解决的问题。
2、目前已有文献研究通感一体化问题,如有文献在满足通信速率的条件下,设计资源分配方案,以实现感知性能优化;有文献在同时考虑系统感知和通信的条件下,设计资源分配方案,以实现系统整体性能优化;然而,现有研究较少考虑无人机通信、感知和控制约束条件下的资源分配及无人机轨迹规划问题,难以实现在控制系统约束下的通感一体化系统性能优化。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种通感一体化系统资源分配及无人机轨迹规划方法,针对包含多无人机、多基站、多目标和一个控制中心的系统,以系统效用函数最大化为优化目标,确定uav通信和感知调度策略及uav的轨迹。
2、为达到上述目的,本发明提供如下技术方案:
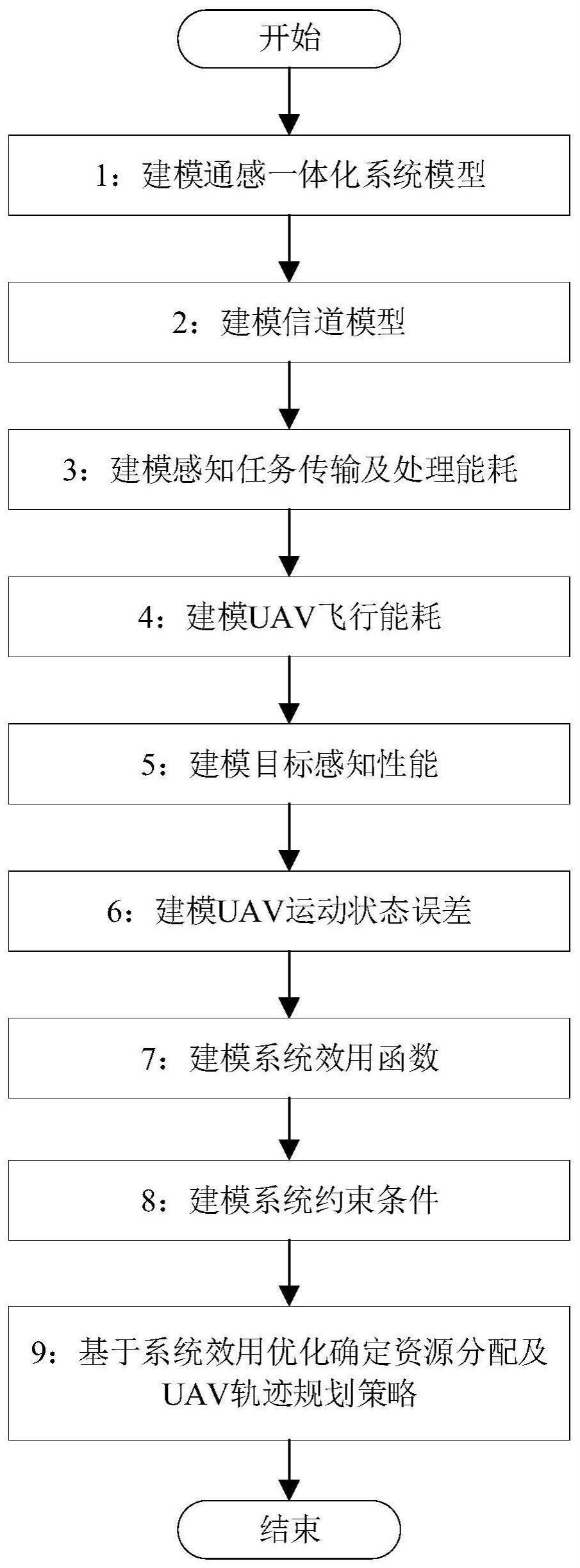
3、一种通感一体化系统资源分配及无人机轨迹规划方法,该方法包括以下步骤:
4、s1:建模通感一体化系统模型;
5、s2:建模信道模型;
6、s3:建模感知任务传输及处理能耗;
7、s4:建模uav飞行能耗;
8、s5:建模目标感知性能;
9、s6:建模uav运动状态误差;
10、s7:建模系统效用函数;
11、s8:建模系统约束条件;
12、s9:基于系统效用优化确定资源分配及uav轨迹规划策略。
13、可选的,所述步骤s1具体为:系统由m个无人机、k个基站、n个目标和一个控制中心组成;无人机配备通信和感知模块,从起始位置出发,飞往目标正上方感知目标信息,并将感知任务传输至基站,由基站处所部署的mec服务器进行任务处理;基站将uav的位置信息传输至控制中心;控制中心根据uav的状态生成控制输入命令,并通过基站传输至uav;令um表示第m架uav,1≤m≤m,令bsk表示第k个基站,1≤k≤k,记bsk处部署的第k个mec服务器为ck,令on表示第n个目标,1≤n≤n;令表示bsk的位置,qn=(xn,yn,0)表示on的位置,qc=(xc,yc,0)表示控制中心的位置;将系统时间划分为离散的等长时隙,令τ表示时隙长度,t表示时隙总数,um的飞行轨迹为其中为um在t时刻的位置,为um的终止位置,h为uav的飞行高度,令表示um的初始位置;给定um的预定轨迹为其中表示um在t时刻的位置。
14、可选的,所述步骤s2具体为:根据公式建模t时刻um与bsk之间的链路信息,其中与分别表示los传输和nlos传输的概率,和分别表示um与bsk之间信道的los传输路损和nlos传输路损;建模为其中μ和ω为常数,φm,k,t表示t时刻bsk与um之间的仰角,φm,k,t建模为表示t时刻um与bsk之间的距离,建模为和分别建模为及其中λl和λn表示路损因子,d0表示自由空间参考距离,fc表示载波频率,c表示光速,和表示t时刻链路阴影衰落损耗;根据公式建模t时刻um感知on的状态时对应的链路信息,其中gt和gr分别表示发送和接收天线增益,λm表示um的雷达波长,μm,n,t表示t时刻um感知on的目标截面积;表示t时刻um与on的距离,建模为
15、可选的,所述步骤s3具体为:根据公式建模感知任务传输及处理能耗,其中表示t时刻uav将感知数据传输至mec服务器所需能耗,表示t时刻mec服务器处理感知数据所需能耗;建模为其中αm,n,t表示um感知on的关联变量,若t时刻um感知on,则αm,n,t=1,否则αm,n,t=0,βm,k,t表示um向bsk传输感知数据的关联变量,若t时刻um向bsk传输所感知的数据,则βm,k,t=1,否则βm,k,t=0,pm,k,t表示t时刻um传输感知数据至bsk时对应的发送功率,为第t个时隙um将所感知的数据传输至bsk时对应的传输时延,建模为其中rm,k,t表示t时刻um传输数据至ck的传输速率,rm,k,t建模为其中σ2链路为链路噪声功率;
16、qm,t表示t时刻um处所缓存的感知数据量,qm,t的更新建模为qm,t+1=max{qm,t+am,t-im,t,0},其中表示t时刻um感知的数据量,表示t时刻um感知on的时长,建模为sn表示on处需要感知的数据总量,为雷达信息估计率,建模为其中,δ表示雷达占空因数,μ表示雷达脉冲持续时间,是由雷达波形形状决定的常数,表示预测雷达回波的方差,b为感知带宽,为t时刻um感知on的感知功率,表示感知链路噪声功率;im,t表示t时刻um传输的感知数据量,建模为其中表示t时刻um把感知到的数据传输到bsk的数据量,建模为
17、
18、建模为其中γm,k,t表示ck处理um的感知数据的二元变量,若t时刻ck处理um的感知数据,则γm,k,t=1,否则γm,k,t=0,表示t时刻ck处理um感知数据的时长,建模为其中θm,k,t=εβm,k,tam,t表示t时刻在ck上处理um的感知数据所需的计算资源,ε表示权重因子,fk表示ck的计算能力。
19、可选的,所述步骤s4具体为:根据公式建模t时刻um的飞行能耗,其中为t时刻um的飞行能耗,建模为其中p0和p0′为常数,utip为转子叶片的叶尖速度,vm,0为um悬停时平均转子诱导速度,vm,t为um在t时刻的飞行速度,ξdrag和ξrotor分别为机身阻力比和转子可靠性,ρair和srotor分别为空气密度和转子盘面积。
20、可选的,所述步骤s5具体为:令ym,n,t表示t时刻um在on处接收到的感知信号;令h1表示目标存在,h0表示目标不存在,则ym,n,t根据二元假设建模为其中sm,n,t表示t时刻um在on处接收到的目标回波信号,nm,n,t表示t时刻um在on处接收到的噪声;根据建模t时刻um感知目标n的虚警概率,其中φn表示on的检测门限值,表示噪声功率,根据确定检测门限值φn;根据公式建模t时刻um感知on的检测概率,定义系统在t时刻的检测概率为
21、可选的,所述步骤s6具体为:令表示um在t时刻的实际状态,其中表示t时刻um的速度,表示笛卡尔坐标系中x轴方向的速度,表示y轴方向的速度,表示t时刻um的加速度,与分别表示x轴方向及y轴方向的加速度;考虑系统中uav的状态为线性时不变离散时间系统,其动力学模型为xm,t+1=amxm,t+bmum,t+wm,t,其中am表示um的状态矩阵,bm表示um的输入矩阵,um,t表示控制输入,即指令加速度,wm,t表示独立同分布的过程噪声,其特征由风力等环境因素引起的uav的机体抖动;um在t时刻的轨迹误差建模为其中表示um的系统状态xm,t应航行所需状态。
22、可选的,所述步骤s7具体为:建模系统效用函数为其中ω1和ω2为权重因子。
23、可选的,所述步骤s8具体为:约束条件建模为其中表示on感知数据的最低速率,表示um传输感知数据的最低速率,δ为常数,表示um的最大飞行速度,lth表示uav之间的安全飞行距离,根据公式雷达最大作用距离,其中smin=kt0bnfnnmin表示最小可检测信号,其中k是玻尔兹曼常数,t0为标准室温,一般取290k,bn为噪声带宽,fn为噪声系数,nmin为匹配滤波器输出端所需要的信号功率s和噪声功率n的最小比值,得到uav与目标的距离约束为
24、可选的,所述步骤s9具体为:在满足uav通信、感知和控制等约束条件下,以系统效用函数最大化为目标,确定uav通信和感知调度策略及uav的轨迹,即:其中分别表示优化后的αm,n,t,βm,n,t,pm,k,t,
25、本发明的有益效果在于:本发明在通感一体化系统中,通过同时约束uav的通信、感知和控制性能,对系统中的uav通信、感知调度策略和uav轨迹进行优化,提高了系统的整体收益。
26、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!