基于树莓派3B+的水下偏振视觉探测系统及成像方法
本发明涉及水下图像处理,更具体的说是涉及一种基于树莓派3b+的水下偏振视觉探测系统及成像方法。
背景技术:
1、水下图像的采集过程受到水体介质的吸收和散射效应的影响,有效的信号信息受到严重的干扰,甚至被湮灭,图像质量严重降质,严重影响了后续对水下目标的识别和分析。现有的水下图像复原方法无法有效分离目标光和散射光,图像质量低。比如专利cn106504222公开的系统是基于螳螂虾的偏振拮抗感知机制,将偏振成像模块所采集到的偏振角度为0、45、90、135的偏振子图像赋予权重系数,构成其通道1与通道2的拮抗参数ph与pd。然而,偏振拮抗感知机制并不完全等同于水下传输机制,会存在一定的误差。
2、因此,如何有效还原水下场景,成为本领域技术人员亟需解决的技术问题。
技术实现思路
1、有鉴于此,本发明提供了一种基于树莓派3b+的水下偏振视觉探测系统及成像方法,可针对性的处理图像干扰中的光学因素,有效抑制后向散射光,提升图像质量和水下场景可见度。
2、为了实现上述目的,本发明采用如下技术方案:
3、第一方面,本发明提供一种基于树莓派3b+的水下偏振视觉探测系统,包括:水下探测子系统和图像处理子系统;
4、所述水下探测子系统以树莓派3b+为中央控制器,采集不同偏振条件下水下目标的偏振子图像;
5、所述图像处理子系统对各所述偏振子图像中的各个像素点进行偏振差分处理,得到后向散射光、目标反射光与图像总辐射光强的偏振度与偏振角的分布关系,根据该分布关系求解最佳目标反射光。
6、进一步的,所述水下探测子系统包括:发射装置和接收装置;
7、所述发射装置包括激光器和起偏器;所述起偏器安装在所述激光器的发射端;
8、所述接收装置包括检偏器、工业相机、步进电机和旋转平台;所述检偏器安装在所述工业相机的接收端;所述工业相机搭载在所述旋转平台上;所述步进电机与所述树莓派3b+通信连接,并驱动所述旋转平台旋转设定角度;
9、所述激光器发出可见光经所述起偏器后形成线偏振光,线偏振光经水中悬浮粒子散射和目标表面反射后改变传播方向,并依次进入所述检偏器和所述工业相机。
10、进一步的,所述图像处理子系统用于实时接收并显示水下原始偏振子图像,并实时显示处理后的复原图像。
11、第二方面,本发明提供一种水下偏振视觉成像方法,包括以下步骤:
12、s1、采集不同偏振条件下水下目标的偏振子图像;
13、s2、对各所述偏振子图像中的各个像素点进行偏振差分处理,得到后向散射光、目标反射光与图像总辐射光强的偏振度与偏振角的分布关系,根据该分布关系求解最佳目标反射光。
14、进一步的,s1中采集三个角度0°、60°和120°下水下目标的偏振子图像。
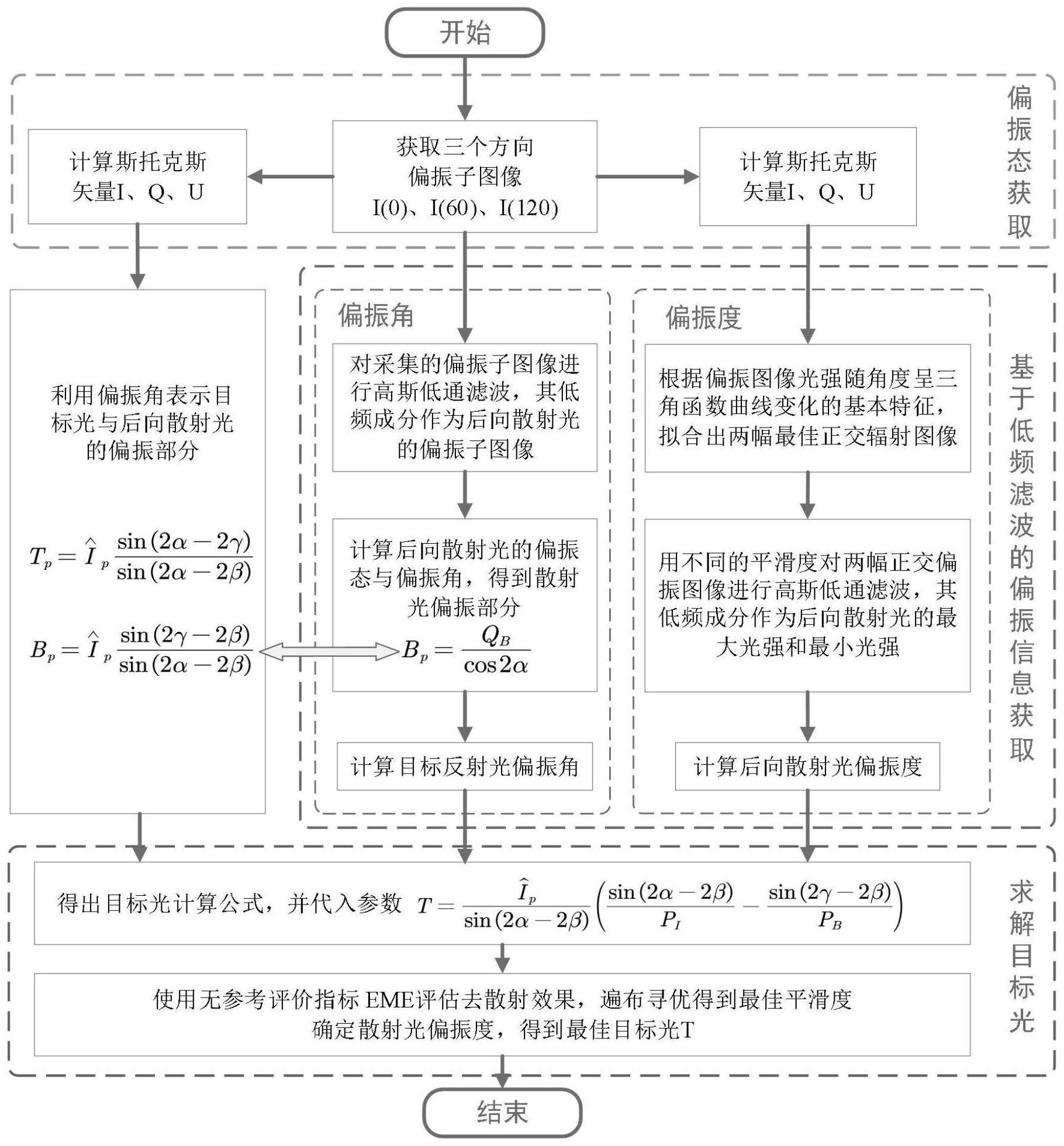
15、进一步的,s2包括以下步骤:
16、s21、对三幅所述偏振子图像计算斯托克斯矢量i、q、u;
17、s22、计算目标反射光与后向散射光的最佳正交传输轴,利用偏振角表示目标反射光的偏振部分tp和后向散射光的偏振部分bp;
18、s23、对三幅所述偏振子图像进行高斯低通滤波,其低频成分作为后向散射光的偏振子图像b(0)、b(60)、b(120);
19、根据后向散射光的偏振子图像计算后向散射光的偏振态qb与偏振角α;
20、根据后向散射光的偏振态qb和偏振角α计算目标反射光的偏振角β;
21、s24、根据偏振子图像的光强随着偏振角度呈三角函数曲线变化的基本特征,拟合出两幅最佳正交偏振图像imax和imin;
22、用不同的平滑度分别对两幅最佳正交偏振图像进行高斯低通滤波,其低频成分作为后向散射光的最大光强bmax和最小光强bmin;
23、基于最大光强bmax和最小光强bmin构建后向散射光的偏振度pb表达式;
24、s25、基于s22得到的偏振部分、s23得到的目标反射光偏振角β以及s24得到的后向散射光偏振度pb构建目标反射光表达式;
25、使用无参考评价指标eme评估去散射效果,遍布寻优得到最佳平滑度σ1与σ2,确定最大光强bmax和最小光强bmin,并求解后向散射光偏振度,得到最佳目标反射光t。
26、进一步的,s21中,斯托克斯矢量i、q、u的计算过程为:
27、
28、其中,i(0)、i(60)、i(120)分别表示0°、60°和120°三个角度下所采集到的偏振子图像。
29、进一步的,s22中,对于偏振子图像上的任意一个像素点,当检偏器旋转角δ与后向散射光偏振角α的差为45°时,后向散射光的偏振方向与最佳正交传输轴方向之间的两个夹角为45°,后向散射光在正交轴方向上各分量的强度相等,此时后向散射光偏振部分被抑制,即δ=α+45°,目标反射光的偏振部分tp表示为:
30、
31、当检偏器旋转角δ与目标反射光偏振角β的差为45°时,目标反射光的偏振方向与最佳正交传输轴方向之间的两个夹角为45°,目标反射光在正交轴方向上各分量的强度相等,此时目标反射光偏振部分被抑制,即当δ=β+45°时,后向散射光的偏振部分bp表示为:
32、
33、其中,γ为图像总辐射强度的偏振角;是利用偏振度公式计算得出的一个量值。
34、进一步的,s23中,目标反射光的偏振角β的表达式为:
35、
36、其中,qb表示后向散射光的偏振态;
37、s24中,后向散射光的偏振度pb的计算公式为:
38、
39、进一步的,s25中目标反射光表达式的构建过程包括:
40、利用目标反射光偏振部分tp和偏振度pt构建目标反射光t的表达式:
41、
42、利用后向散射光的偏振部分bp和偏振度pb,构建后向散射光b的表达式:
43、
44、根据b+t=i,可得图像总辐射光强i、目标反射光t与后向散射光b的偏振度与偏振角的关系式:
45、
46、将目标反射光偏振度pt由α,β、γ、pi、pb表达,并代入目标反射光表达式,得到最终的目标反射光表达式:
47、
48、其中,pi表示图像总辐射光强的偏振度。
49、经由上述的技术方案可知,与现有技术相比,本发明具有以下有益效果:
50、1、本发明以树莓派3b+作为中央控制器,其内部搭载有蓝牙和wifi模块,可提供高速稳定的无线互联,确保水下图像采集和传输过程稳定进行。同时,树莓派3b+作为主要的处理单元,具有较低的成本并且易于获取。此外,树莓派3b+的开源生态系统为用户提供了广泛的软件库和工具,使得系统能够灵活适应不同的应用场景和需求。
51、2、本发明结合偏振度与偏振角信息进行水下图像复原,增添了偏振信息维度,更有助于水下场景的细节恢复。同时,该方法充分考虑偏振信息的空间变化,利用低频滤波技术对其进行全局估计,在一定程度上抑制图像的非均匀性,并摆脱了图像背景的限制。
52、相比于其他复原方法,本发明有针对性的处理图像干扰中的光学因素,可在高浓度散射介质环境下通过主动偏振光照明,有效抑制背向散射光,分离物体光和散射光,图像的细节信息具有高复原度,提升图像质量和水下场景可见度,便于工作人员更好地观察水下场景生物,并减轻人工水下作业负担。
53、3、本发明可用于水环境监测、水下生物的观测,潜水员的看护、潜水地点的选择、水下目标观察、水上救助打捞、近海搜索、深水网箱渔业养殖等方面,带来良好的经济效益;在海洋领域的水下作业和建设发展中,如在石油开发、科学研究、海底地貌勘察、水下考古等领域,能满足多样化需求,应用场景广阔。
- 还没有人留言评论。精彩留言会获得点赞!