基于能效最优的多用户对无人机中继通信联合优化方法
本发明涉及无人机通信,具体涉及基于能效最优的多用户对无人机中继通信联合优化方法。
背景技术:
1、无人机由于其机动性高、可按需部署、建立视距链路可能性大等优点,被广泛应用于无线通信领域。近年来,各种无人机辅助无线通信技术得到了快速发展,如无人机辅助中继通信、无人机辅助泛在覆盖、无人机辅助信息发布和数据采集等。在无人机中继通信中,通信系统的中断概率或能耗最小化、系统吞吐量或能效最大化也得到了广泛的研究。而节能对于无人机辅助通信是至关重要的,因为无人机携带的电池或燃料存储是有限的。因此,从通信的角度来看,吞吐量和能耗的平衡问题即能效问题对于无人机辅助通信技术具有重要意义,值得深入研究。
2、在现有的无人机辅助中继通信研究中,单用户对场景下的能效问题已经得到了深入的研究。然而,单用户对情况与实际通信场景不太相符,因为在实际的通信场景中可能有多个用户对需要相互通信。虽然已有一些工作研究了多用户对场景下的无人机中继通信,但是这些工作只分别研究了吞吐量最大化或能耗最小化问题,并没有研究能效最大化问题。在无人机中继通信中,无人机可以采用半双工或者全双工方式进行工作,半双工方式需要划分频谱和/或时间资源才能实现双向通信,而全双工方式能够在同一频段同时发送和接收数据,从而可以实现更高的吞吐量。目前少有的研究全双工无人机中继通信能效最大化问题的工作中,考虑的都是旋翼无人机,而多用户对全双工固定翼无人机中继通信的能效最大化问题还未得到研究。
技术实现思路
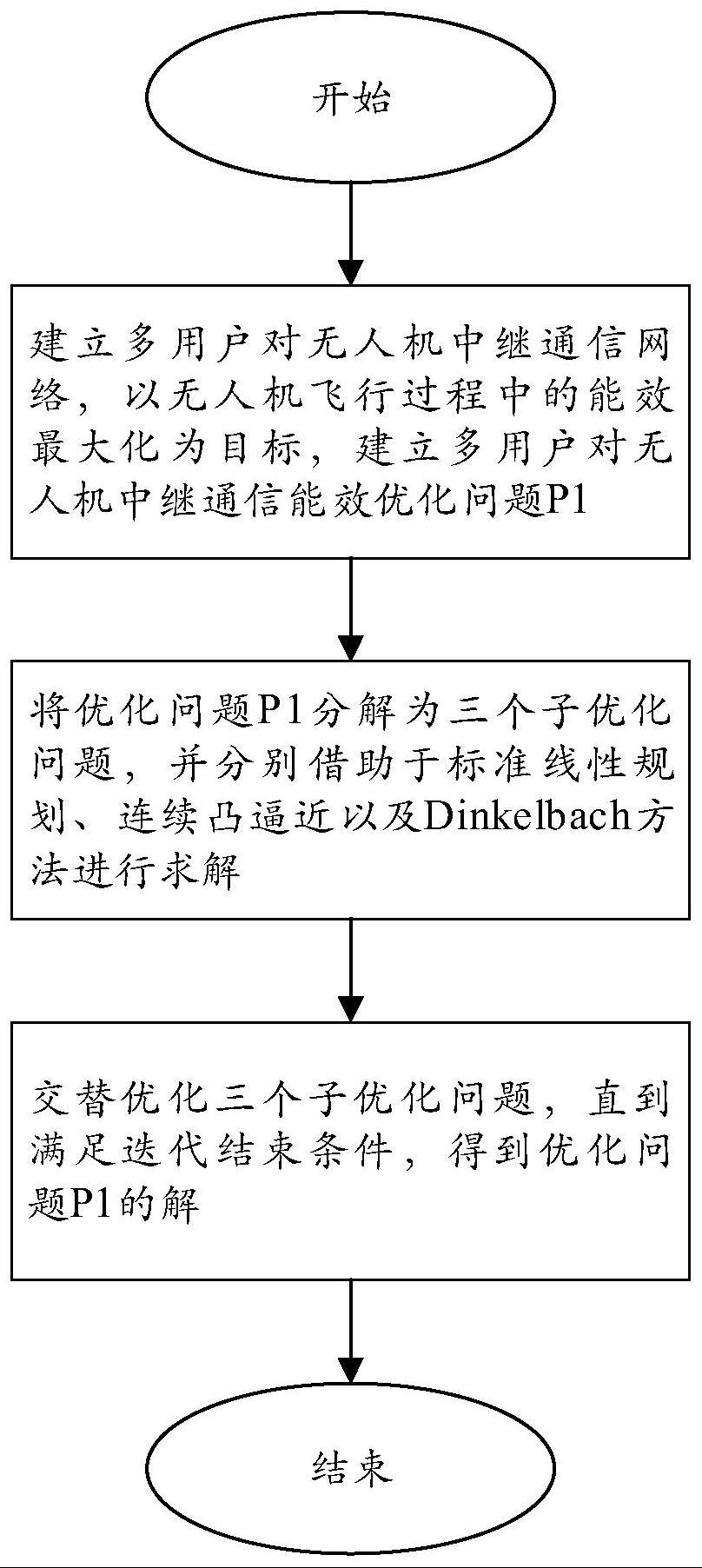
1、本发明针对上述问题,提供了基于能效最优的多用户对无人机中继通信联合优化方法,部署一架固定翼无人机采用时分多址调度协议为多个源-目的用户对提供服务,以无人机飞行过程中的能效最大化为目标,建立多用户对无人机中继通信能效优化问题,通过问题分解分别求解通信调度优化子问题、无人机发射功率优化子问题和无人机轨迹优化子问题,进而得到通信调度和功率以及轨迹的整体联合优化算法,实现多用户对无人机中继通信能效最大化。
2、本发明提供的基于能效最优的多用户对无人机中继通信联合优化方法,其特征在于,包括建立多用户对无人机中继通信网络,所述多用户对无人机中继通信网络包括m个源节点用户sm,m个目的节点用户dm和一个采用时分多址协议的无人机r,源节点用户sm和其目的节点用户dm之间的所有数据都需要无人机r进行转发且每个时隙内无人机最多为一个源-目的用户对服务,其中m=1,…,m;
3、以最大化无人机在通信时间t秒内的能效为目标,利用多用户对的通信调度约束、无人机的起止位置约束、速度和加速度约束以及无人机的发射功率约束,建立多用户对无人机中继通信能效优化问题p1;
4、根据多用户对无人机中继通信能效优化问题p1的通信调度约束、无人机的发射功率约束以及轨迹约束,将p1分解为通信调度优化子问题p2、无人机发射功率优化子问题p3以及无人机轨迹优化子问题p4;通信调度优化子问题p2通过标准线性规划得到最优通信调度,无人机发射功率优化子问题p3通过连续凸逼近得到最优无人机发射功率,无人机轨迹优化子问题p4通过连续凸逼近和dinkelbach方法得到最优无人机轨迹;
5、结合子问题p2的标准线性规划、子问题p3的连续凸逼近和子问题p4的连续凸逼近及dinkelbach方法进行优化通信调度、无人机发射功率、无人机轨迹的交替迭代算法,直到满足交替迭代结束条件,最终得到通信调度最优解、无人机发射功率最优解以及无人机轨迹最优解。
6、进一步的,无人机在通信时间t秒内的总的信道容量rtot表示为:
7、
8、其中,b表示通信系统带宽,n表示通信时间t划分的时隙个数,δ为每个时隙的长度,αm[n]表示无人机在第n个时隙为第m个源-目的用户对服务的通信调度标记,当无人机在第n个时隙为第m个源-目的用户对服务时,αm[n]=1,否则αm[n]=0,表示第n个时隙源节点用户sm和无人机r之间的平均信道速率,表示第n个时隙无人机r到目的节点用户dm的瞬时信道容量。
9、进一步的,以无人机在通信时间t秒内的能效最大化为目标,建立多用户对无人机中继通信能效优化问题p1具体为:
10、(p1)
11、s.t.c1:
12、c2:
13、c3:
14、c4:
15、c5:0≤pr(n)≤prmax
16、c6:
17、c7:v(1)=v0,q(1)=[x0,y0]
18、c8:v(n+1)=vf,q(n+1)=[xf,yf]
19、c9:
20、c10:v(n+1)=v(n)+a(n)δ
21、c11:||v(n)||≤vmax
22、c12:||v(n)||≥vmin
23、c13:||a(n)||≤amax
24、其中,通信调度α={αm[n]},无人机发射功率p={pr(n)},无人机轨迹q={q(n)},轨迹相关的仰角优化变量n=1,…,n;a(n),v(n)和q(n)分别表示第n个时隙无人机的加速度、速度和水平坐标,e表示无人机在t时间内的飞行能耗;c1~c2表示通信调度约束,无人机在第n个时隙为第m个源-目的用户对服务的通信调度标记αm[n]为二进制变量;c3~c4表示仰角约束,其中表示第n个时隙源节点用户sm和无人机之间的仰角,表示第n个时隙无人机和目的节点用户dm之间的仰角,表示源节点用户sm的水平位置坐标,表示目的节点用户dm的水平位置坐标;c5表示无人机的最大发射功率约束,其中pr(n)表示第n个时隙无人机的发射功率,prmax表示无人机的最大发射功率;c6表示无人机的平均发射功率不超过预设的无人机平均功率c7~c8表示无人机的速度和起止位置约束,v(1)和v(n+1)分别表示无人机初速度v0和末速度vf,q(1)和q(n+1)分别表示无人机的初始位置[x0,y0]和终止位置[xf,yf],下标f表示终止;c9~c10表示无人机的水平坐标q(n)、飞行速度v(n)和加速度a(n)之间的线性关系;c11~c13表示最大、最小速度约束和最大加速度约束,无人机的飞行速度v(n)不超过无人机飞行速度最大值vmax、不小于无人机飞行速度最小值vmin,无人机的飞行加速度a(n)不超过无人机飞行加速度最大值amax。
25、更一步的,通过对αm[n]进行松弛处理,利用标准线性规划得到最优通信调度的子问题p2为:
26、
27、进一步的,无人机发射功率优化子问题p3通过连续凸逼近得到最优无人机发射功率的具体过程包括将第n个时隙sm和无人机之间的平均信道速率进行一阶泰勒展开,得到子问题p3.1为:
28、(p3.1)
29、s.t.c5,c6
30、其中为第j+1次迭代中第n个时隙源节点用户sm和无人机之间的平均信道速率关于第n个时隙无人机的发射功率pr(n)的一阶泰勒展开值,为第j+1次迭代中的取值,为第j+1次迭代中第n个时隙无人机的发射功率。
31、进一步的,无人机轨迹优化子问题p4通过连续凸逼近和dinkelbach方法得到最优无人机轨迹的具体过程包括将和进行一阶泰勒展开和引入松弛变量τ(n),得到子问题p4.1为:
32、(p4.1)
33、s.t.c7,c8,c9,c10,c11,c13
34、c14:τj+1(n)≥vmin
35、c15:
36、c16:
37、c17:
38、其中,和分别表示第j+1次迭代中和的一阶泰勒展开值,和分别表示第j+1次迭代中和的取值,aj+1(n),vj+1(n),qj+1(n)分别表示第j+1次迭代中无人机的加速度、速度和水平坐标,τj+1(n)表示第j+1次迭代中松弛变量τ(n)的取值,c1和c2表示无人机的空气动力常量参数,g表示重力加速度,[]t表示转置。
39、进一步的,通过交替迭代优化得到最优的通信调度和最优的无人机发射功率以及最优的无人机轨迹具体步骤为:
40、步骤一:初始化无人机的轨迹{q(n)}、仰角和无人机发射功率{pr(n)},初始化迭代次数j=0;
41、步骤二:给定{qj(n)}、和求解通信调度优化子问题p2,得到最优解
42、步骤三:给定{qj(n)}和求解无人机发射功率优化子问题p3,得到最优解
43、步骤四:给定和求解无人机轨迹优化子问题p4,得到最优解{qj+1(n)}和
44、步骤五:若无人机能效的相对增长小于最大容忍误差ε,则迭代结束,否则更新j=j+1,返回步骤二。
45、与现有技术相比,本发明的有益效果在于:建立了多用户对无人机中继通信网络,在此基础上,将通信调度与无人机发射功率与无人机轨迹相结合,提出了无人机能效最优的联合优化方法。与仅优化发射功率、仅优化无人机轨迹方法相比,本发明所提出的联合优化方法能有效提升多用户对无人机中继通信网络的能量效率。
- 还没有人留言评论。精彩留言会获得点赞!