一种智能网联路侧消息广播覆盖范围检测方法与流程
本发明属于数据检测领域,具体涉及一种智能网联路侧消息广播覆盖范围检测方法。
背景技术:
1、路侧消息是指由安装在开放道路路侧的路侧单元(road side unit,rsu)通过pc5链路广播至车端的消息,通常包含实时信号灯消息(spat)、路侧安全消息(rsm)、交通事件和交通标志信息(rsi)、地图消息(map)。车辆通过前装或后装的车载单元(on boardunit,obu)接收并解析路侧消息,并传递给网联汽车决策与控制单元,实现路侧消息的“数据上车”,即实际条件下的数据质量可供智能网联车辆安全使用,且能发挥相应的场景功能。
2、如中国专利cn102215144a公开的一种丢包率的测量方法,该方法包括:第一端获取接收到的当前测量响应帧的帧序号与上一帧测量响应帧的帧序号,其中,当前测量响应帧与上一帧测量响应帧为第二端对第一端发送的丢包率测量消息帧进行响应得到;第一端判断当前测量响应帧的帧序号与上一帧测量响应帧的帧序号之间的差值是否为1;若为1,则第一端根据当前测量响应帧和上一帧测量响应帧中携带的计数信息来计算丢包率;若大于1,则所述第一端根据所述当前测量响应帧和所述上一帧测量响应帧中携带的计数信息以及所述帧序号之间的差值来计算得到丢包率。上述方法能解决了现有技术在出现协议帧丢失的情况下丢包率测量不准确的问题,但是却不能实现对路侧消息覆盖范围的计算。
3、智能网联汽车开放道路的路侧消息覆盖范围计算对于已建成的开放、全息路口的数据质量运维工作至关重要。如中国专利cn115278528a提供一种路侧终端消息发送方法,所述方法包括:获取目标覆盖范围的路况信息,所述目标覆盖范围为路侧终端所支持的范围;基于所述目标覆盖范围的路况信息,确定一种或多种路侧消息分别对应的发送频率,所述路侧消息为所述路侧终端发送至车辆的消息;基于所述一种或多种路侧消息分别对应的发送频率,向所述目标覆盖范围的车辆发送所述一种或多种路侧消息。其设计的路侧终端消息发送方法通过对目标覆盖范围的路况信息进行分析,确定一种或多种路侧消息分别对应的发送频率,可以针对不同路况提高或降低路侧消息的发送频率,可以动态调整路侧消息对应的通信空口资源,可以提高通信空口资源的利用效率。但是一旦路侧消息覆盖范围不达标,就会导致智能网联车辆无法有充足的时间预判前方的路况并做出正确的决策,从而影响行车安全。
4、现有的路侧消息验证方法中,路侧单元广播覆盖范围的测量方法是,通过信号接收器、无线功率计等专业设备测定路侧单元附近信号强度值,用插值的方法绘制区域信号强度热力图,根据设定好的阈值确定路侧单元广播覆盖范围。该种方法精度较高,但是需要标定信号强度最低阈值等参数,且测量范围内不同点位的信号强度值需要耗费大量人力和时间,无法快速对大规模的点位进行覆盖范围验证,不能满足智能网联大规模开放道路路侧单元覆盖范围日常运维的需求。
技术实现思路
1、本技术所要解决的技术问题为:如何快速识别并计算不同道路方向上的路侧单元消息覆盖范围,并且保证一定的计算精度。为解决上述问题,本技术设计了一种智能网联路侧消息广播覆盖范围检测方法,以求通过实现每条数据接收位置的自动划分以及不同方向的消息覆盖范围计算。
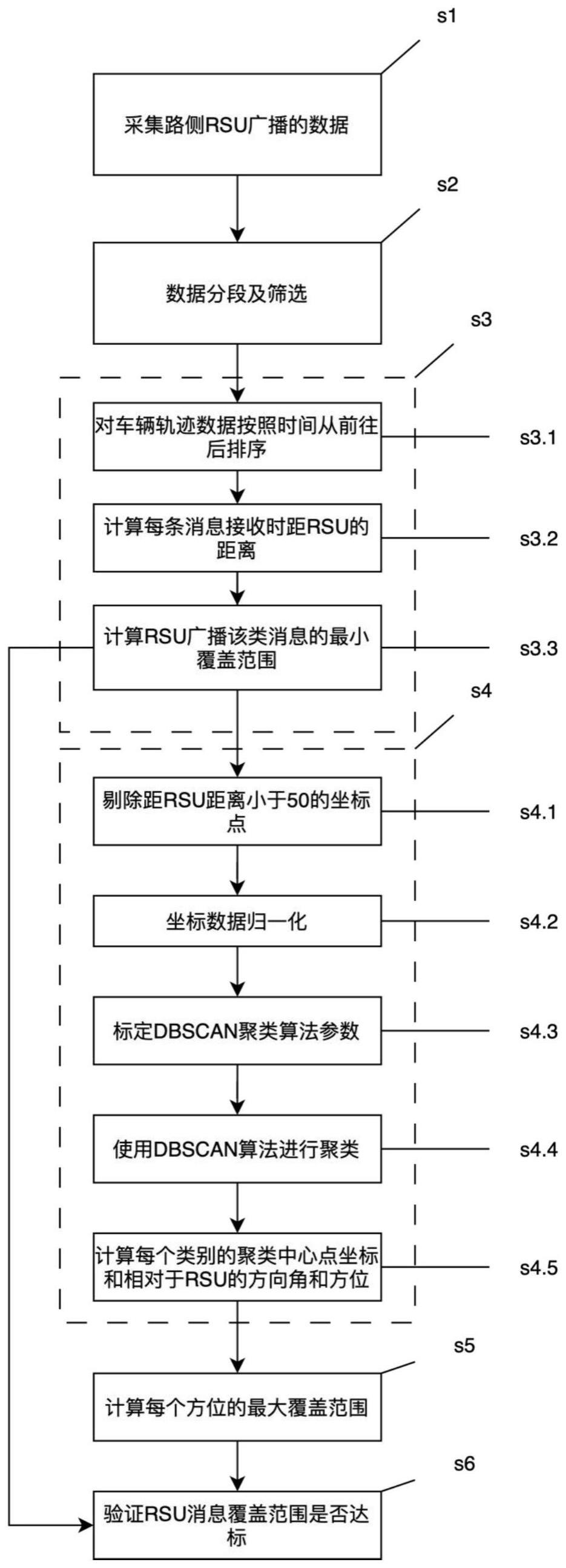
2、一种智能网联路侧消息广播覆盖范围检测方法,包括以下步骤:
3、步骤s1、通过数据采集车采集路侧单元数据;
4、步骤s2、对路侧单元数据进行分段及筛选;
5、步骤s3、用插值法计算每条路侧单元数据接收时车辆的位置以及距路侧单元的距离;输出路侧单元发送该类消息覆盖范围的最小值,并剔除距离小于50米的接收坐标;
6、步骤s4、使用dbscan聚类方法对接收坐标数据集中的坐标按照所处方位分类;
7、步骤s5、计算路侧单元数据在每个方位的最大覆盖范围。
8、优选地,所述步骤s1包括以下步骤:
9、步骤s11、搭建数据采集车,选取普通车辆作为测试车辆,后装车载单元;
10、步骤s12、通过车载单元数据接口,打开车载单元消息接收模块,打开车载单元自带定位模块,接收轨迹数据,并进行校时;
11、步骤s13、依照既定轨迹路线在路侧单元周围行驶,记录待测的路侧消息数据、每条消息接收时的本地时间以及车辆行驶轨迹数据;
12、步骤s14、采集完成后,关闭车载单元消息接收模块和定位模块,将接收到的所有路侧消息数据、行驶轨迹数据传输至计算机存储单元中,以备离线分析使用。
13、优选地,所述步骤s2包括以下步骤:
14、步骤s21、将所有的路侧单元数据按照接收时间戳从小到大排序;
15、步骤s22、依次用后一条数据的时间戳减去前一条数据的时间戳,得到后一条数据的时间间隔,第一条数据的时间间隔记为0;
16、步骤s23、对数据按照时间间隔分段,设定时间间隔小于等于10s时数据连续,筛选时间间隔大于10s的数据作为每一段连续数据的开始点,设一共能分出n段连续数据;
17、步骤s24、计算每一段连续数据的持续时间,持续时间为每段连续数据的最后一条数据的接收时间减去第一条数据的接收时间;
18、步骤s25、将持续时间小于5秒的连续数据段从数据集中剔除。
19、优选地,所述步骤s3包括以下步骤:
20、步骤s31、将车辆轨迹数据集按照时间戳大小从小到大排序;并计算每一条数据接收时的车辆坐标;
21、步骤s32、计算上述所有消息接收距路侧单元距离的最小值dmin,即为路侧单元消息的最小覆盖范围。
22、优选地,所述步骤s32包括以下步骤:
23、步骤s321、设该条数据的接收时间戳是τ,将车辆轨迹数据集分成两个集合,记为m和n;m中的轨迹数据时间戳均小于τ,n中的轨迹数据时间戳均大于等于τ;
24、步骤s322、判断m和n是否为空;若m和n均不为空,计算过程参考步骤s323~步骤s326;若m为空但n不为空,计算过程见步骤s327;若m不为空但n为空,计算过程见步骤s328;
25、步骤s323、计算轨迹数据集m中时间戳的最大值tm,时间戳最大的数据对应的经度为xm,纬度为ym;n中的时间戳的最小值tn,时间戳最小的数据对应的经度为xn,纬度为yn;其中tm<τ≤tn;
26、步骤s324、计算比例系数k,公式如下:
27、
28、步骤s325、计算数据接收时的车辆坐标,接收经度为u,纬度为v,公式如下:
29、u=xm+k(xn-xm);
30、v=ym+k(yn-ym);
31、步骤s326、计算轨迹数据集n中的时间戳最小的数据对应的经度为xn,纬度为yn,此时直接对数据接收时的坐标赋值,有u=xn,v=yn;
32、步骤s327、计算计算轨迹数据集m中时间戳最大的数据对应的经度为xm,纬度为ym,此时直接对数据接收时的坐标赋值,有u=xm,v=ym;
33、步骤s328、设该rsu经度为x0,纬度为y0,用haversine公式计算所有接收位置到rsu的距离d;
34、步骤s329、重复上述步骤s321~步骤s328,计算每条消息接收时距路侧单元的距离,形成路侧单元数据接收坐标数据集。
35、优选地,所述步骤s4包括以下步骤:
36、步骤s41、数据集中剔除距路侧单元距离小于50米的坐标点;
37、步骤s42、将坐标数据归一化;
38、步骤s43、标定dbscan聚类算法的参数;
39、步骤s44、使用dbscan算法按照标定的参数对路侧单元发送的路侧单元数据接收坐标数据集分别进行聚类;
40、步骤s45、计算该路侧单元发送的路侧单元数据接收坐标数据集的每个类别的聚类中心点经纬度坐标,并计算聚类中心相对于路侧单元的方向角和方位。
41、优选地,所述步骤s42包括以下步骤:
42、步骤s421、用矩形划定待测开放道路的范围,设矩形的四个顶点的经纬度坐标分别为(xlb,ylb),(xlb,yub),(xub,ylb),(xub,yub),即对于车辆轨迹数据集中的任意一个轨迹点的坐标(xζ,yζ),矩形的四个顶点的坐标需满足xlb<xζ<xub,ylb<yζ<yub;
43、步骤s422、进行归一化,设步骤s3步中计算得到的一条路侧单元数据接收时的车辆坐标经度为u,纬度为v,归一化之后的经度记为u',纬度记为v';
44、
45、
46、步骤s423、重复步骤s422中的步骤,直到完成所有路侧单元数据接收坐标数据集的数据归一化。
47、优选地,所述步骤s43包括以下步骤:
48、步骤s431、用haversine公式计算矩形对角线的距离,即坐标(xub,yub)与(xlb,ylb)之间的距离,记为d,单位为米;
49、标定dbscan算法中的邻域半径参数r,参考公式如下:
50、
51、其中d为步骤s431中计算的矩形对角线距离,θ为rsu布设点位附近交叉口相邻两条交汇道路的最小夹角,对于规则交叉口,θ为90°,若存在极个别特殊情况的交叉口,相邻两条交汇道路的θ小于45°,可按照实际最小夹角设置,若rsu布设位置为基本路段,θ=180°;
52、步骤s432、标定dbscan算法中的每个簇的最少点数目pm,将其值设为10。
53、优选地,所述步骤s45包括以下步骤:
54、步骤s451、设dbscan算法输出的类别的总数为i,用i表示每个类别的编号,有0≤i≤i,i∈z+;提取每一类的路侧单元数据接收坐标原始数据集;
55、步骤s452、计算第i类数据的坐标经度的平均值作为聚类中心点经度,坐标纬度的平均值作为聚类中心点纬度;
56、步骤s453、标定该类别的方位;
57、步骤s454、重复步骤s451~步骤s453的步骤,直至完成算法输出的所有类别的方位标定,最后得到标定方位的路侧单元数据接收位置数据集。
58、优选地,所述步骤s5包括以下步骤:
59、步骤s51、根据步骤s3中距离的计算结果和步骤s4中方位的计算结果,对于某个方向s,提取该方向上所有数据,并计算距rsu距离的最大值,即为该方向的最大覆盖范围;若某个方向没有数据,则跳过;
60、步骤s52、重复步骤s51,遍历计算东、南、西、北四个方向的最大覆盖范围。
61、本技术的优点和效果如下:
62、1、本技术设计的一种智能网联路侧消息广播覆盖范围检测方法,考虑了实际开放道路的路侧单元消息覆盖范围的运维工作场景,充分模拟实际车辆使用路侧单元数据的应用场景,通过线性插值、无监督聚类等方式,无需路侧单元附近道路高精地图信息、以及过多参数标定和人工参与,仅需了解路侧单元布设点位附近交叉口道路交汇的大致角度,即可自动实现每条数据接收位置的自动划分以及不同方向的消息覆盖范围计算。
63、2、本技术设计的一种智能网联路侧消息广播覆盖范围检测方法,仅用一台常规的车载单元,模拟实际“数据上车”使用条件,即可快速识别并计算不同道路方向上的消息覆盖范围,并且保证一定的计算精度,且该方法可以快速应用在大规模开放道路路侧消息验证的工作中,从而满足日常巡检运维的使用要求。
64、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,从而可依照说明书的内容予以实施,并且为了让本技术的上述和其他目的、特征和优点能够更明显易懂,以下以本技术的较佳实施例并配合附图详细说明如后。
65、根据下文结合附图对本技术具体实施例的详细描述,本领域技术人员将会更加明了本技术的上述及其他目的、优点和特征。
- 还没有人留言评论。精彩留言会获得点赞!