云台相机的俯仰角动态矫正方法和装置、设备及存储介质与流程
本技术涉及航拍设备,尤其涉及一种云台相机的俯仰角动态矫正方法和装置、设备及存储介质。
背景技术:
1、航拍云台相机在农林植保、地理勘察、电力巡检、交通巡检以及非民用等领域一直有着非常重要的应用。随着航拍云台相机的发展,人们对于航拍云台相机的控制精度越来越高。其中,航拍云台相机的俯仰角在高空飞行中容易累计机械误差,且步进电机在出现丢步的情况下不能进行角度补偿,使得误差越来越大,所以需要对俯仰角进行矫正。相关技术中,对于俯仰角转正的方式主要有两种,第一种是在航拍前进行初始化时候使用标准仪器进行静态矫正,第二种则是使用激光雷达辅助矫正。第一种矫正方法仅对固定场景有效,无法解决运动过程中俯仰角的累积误差。第二种矫正方法需要在航拍设备上增加激光雷达,且传统的激光雷达无法满足高空远距离的要求。因此,如何动态调整航拍设备的俯仰角,成为了亟待解决的技术问题。
技术实现思路
1、本技术实施例的主要目的在于提出一种云台相机的俯仰角动态矫正方法和装置、设备及存储介质,旨在实现动态俯仰角矫正,且无需增加额外的设备。
2、为实现上述目的,本技术实施例的第一方面提出了一种云台相机的俯仰角动态矫正方法,应用于云台相机,所述方法包括:
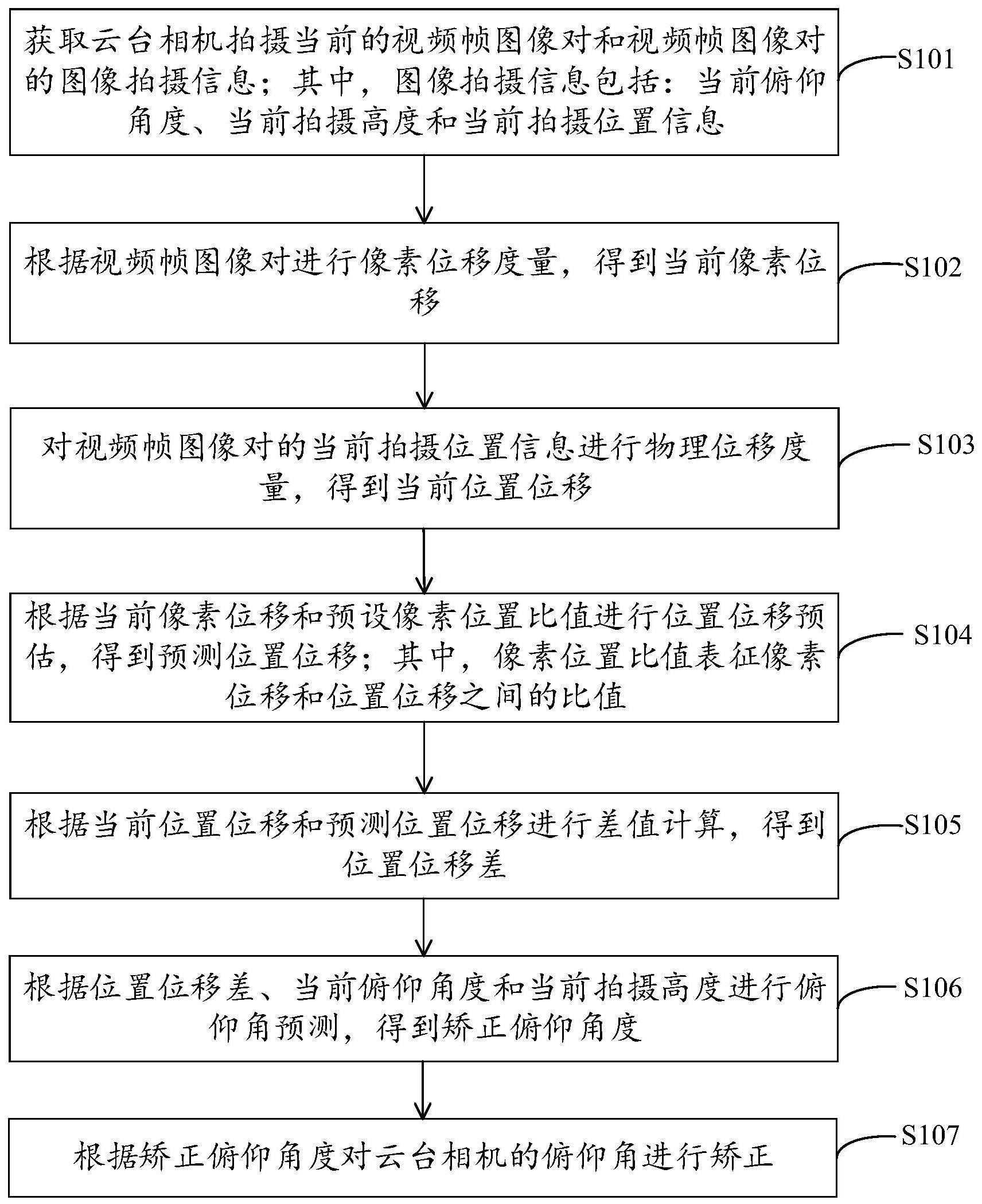
3、获取所述云台相机拍摄当前的视频帧图像对和所述视频帧图像对的图像拍摄信息;其中,所述图像拍摄信息包括:当前俯仰角度、当前拍摄高度和当前拍摄位置信息;
4、根据所述视频帧图像对进行像素位移度量,得到当前像素位移;
5、对所述视频帧图像对的所述当前拍摄位置信息进行物理位移度量,得到当前位置位移;
6、根据所述当前像素位移和预设像素位置比值进行位置位移预估,得到预测位置位移;其中,所述像素位置比值表征像素位移和位置位移之间的比值;
7、根据所述当前位置位移和所述预测位置位移进行差值计算,得到位置位移差;
8、根据所述位置位移差、所述当前俯仰角度和所述当前拍摄高度进行俯仰角预测,得到矫正俯仰角度;
9、根据所述矫正俯仰角度对所述云台相机的俯仰角进行矫正。
10、在一些实施例,所述视频帧图像对包括:当前视频帧图像和选定视频帧图像,所述选定视频帧图像为所述当前视频帧图像的上一视频帧图像;所述根据所述视频帧图像对进行像素位移度量,得到当前像素位移,包括:
11、对所述当前视频帧图像进行中心区域选定,得到选定区域;
12、在所述当前视频帧图像对所述选定区域进行中心位置提取,得到当前中心位置信息;
13、在所述选定视频帧图像对所述选定区域进行中心位置提取,得到选定中心位置信息;
14、对所述当前中心位置信息和所述选定中心位置信息进行偏移量计算,得到所述当前像素位移。
15、在一些实施例,所述对所述视频帧图像对的所述当前拍摄位置信息进行物理位移度量,得到当前位置位移,包括:
16、获取所述当前视频帧图像的所述当前拍摄位置信息,得到当前位置信息;
17、获取所述选定视频帧图像的所述当前拍摄位置信息,得到选定位置信息;
18、根据所述当前位置信息和所述选定位置信息进行位移计算,得到所述当前位置位移。
19、在一些实施例,在所述根据所述当前像素位移和预设像素位置比值进行位置位移预估,得到预测位置位移之前,所述方法还包括:
20、构建所述预设像素位置比值,具体包括:
21、获取所述云台相机拍摄的至少两帧历史视频帧图像和每一所述历史视频帧图像的历史拍摄位置信息;
22、对相邻两帧的所述历史视频帧图像进行像素位移度量,得到至少两个历史像素位移;
23、对相邻两帧的所述历史视频帧图像的所述历史拍摄位置信息进行位置位移度量,得到至少两个历史位置位移;
24、将所述历史像素位移和对应的所述历史位置位移进行比值计算,得到候选像素位置比值;
25、将至少两个所述候选像素位置比值进行均值计算,得到所述预设像素位置比值。
26、在一些实施例,所述根据所述位置位移差、所述当前俯仰角度和所述当前拍摄高度进行俯仰角预测,得到矫正俯仰角度,包括:
27、通过预设的俯仰角预估模型对所述位置位移差、所述当前俯仰角度和所述当前拍摄高度进行俯仰角预测,得到候选俯仰角度;
28、根据所述候选俯仰角度、所述当前俯仰角度、预设平均偏差和预设平滑系数进行偏差度量,得到俯仰角偏差值;
29、根据所述当前俯仰角度和所述俯仰角偏差值进行求和,得到所述矫正俯仰角度。
30、在一些实施例,在所述根据所述候选俯仰角度、所述当前俯仰角度、预设平均偏差和预设平滑系数进行偏差度量,得到俯仰角偏差值之前,所述方法还包括:构建所述预设平均偏差,具体包括:
31、获取至少两张所述历史视频帧图像的历史俯仰角度;
32、将每一所述历史视频帧图像的所述历史俯仰角度和预设的验证俯仰角度进行差值计算,得到俯仰角度差;
33、将至少两个所述俯仰角度差进行均值计算,得到所述预设平均偏差。
34、在一些实施例,在所述获取所述云台相机拍摄当前的视频帧图像对和所述视频帧图像对的图像拍摄信息之后,包括:
35、获取所述当前视频帧图像的所述图像拍摄信息,得到当前拍摄信息;
36、获取所述选定视频帧图像的所述图像拍摄信息,得到上一拍摄信息;
37、将所述当前拍摄信息和所述上一拍摄信息进行比对,得到拍摄信息差;
38、若所述拍摄信息差大于预设阈值,停止所述云台相机的矫正俯仰角的计算。
39、为实现上述目的,本技术实施例的第二方面提出了一种云台相机的俯仰角动态矫正装置,所述装置包括:
40、应用于云台相机,所述装置包括:
41、获取模块,用于获取所述云台相机拍摄当前的视频帧图像对和所述视频帧图像对的图像拍摄信息;其中,所述图像拍摄信息包括:当前俯仰角度、当前拍摄高度和当前拍摄位置信息;
42、像素位移度量模块,用于根据所述视频帧图像对进行像素位移度量,得到当前像素位移;
43、物理位移度量,用于对所述视频帧图像对的所述当前拍摄位置信息进行物理位移度量,得到当前位置位移;
44、位置预测模块,用于根据所述当前像素位移和预设像素位置比值进行位置位移预估,得到预测位置位移;其中,所述像素位置比值表征像素位移和位置位移之间的比值;
45、位移差计算模块,用于根据所述当前位置位移和所述预测位置位移进行差值计算,得到位置位移差;
46、角度预测模块,用于根据所述位置位移差、所述当前俯仰角度和所述当前拍摄高度进行俯仰角预测,得到矫正俯仰角度;
47、矫正模块,用于根据所述矫正俯仰角度对所述云台相机的俯仰角进行矫正。
48、为实现上述目的,本技术实施例的第三方面提出了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的方法。
49、为实现上述目的,本技术实施例的第四方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的方法。
50、本技术提出的云台相机的俯仰角动态矫正方法和装置、设备及存储介质,其通过获取相邻两帧视频帧图像的当前像素位移、当前位置位移,然后基于当前像素位移和预设像素位置比值计算出理论上的位置位移作为预测位置位移。然后基于预测位置位移和当前位置位移确定位置位移差,以根据位置位移差判断俯仰角度是否存在偏差。基于位置位移差、当前俯仰角度和当前拍摄高度重新计算真实的俯仰角度作为矫正俯仰角度,以根据矫正俯仰角度对云台相机的俯仰角进行矫正,以实现云台相机在动态拍摄过程的实时矫正。因此,采用像素位移、位置位移、拍摄高度之间的关系计算出矫正俯仰角度,使得矫正俯仰角计算准确且简易,无需预先静态矫正,且无需增加外部设备,使得云台相机在高空远距离拍摄时都能有较高的控制精度。
- 还没有人留言评论。精彩留言会获得点赞!