一种信标光捕获跟踪方法及系统
本发明属于光通信,更具体地,涉及一种信标光捕获跟踪方法及系统。
背景技术:
1、目前光通信领域,信标光光源多采用连续光,由于连续光的功率有限,在信标光传输过程中由于大气的衰减和湍流的影响,导致其到达接收端的光信号十分微弱并具有光强起伏,传输距离受限。
2、在无线光通信的信标光捕获跟踪过程中,通信终端难免会受到各种背景光噪声的影响。背景噪声将严重影响系统的信噪比,是信标光捕获跟踪失败的主要原因之一。目前,常用的去除背景光噪声的方法主要通过采用窄带光学滤波器。虽然这种方法能过滤掉大部分背景噪声,但接收端接收到的背景光噪声大部分来源于太阳光、月光、恒星光,这些光源都是宽光谱的,对于窄带滤光片来讲这些光噪声可以被抑制但不能够完全抑制,同时采用滤光的方式虽然能够抑制背景噪声但也会减小信标光的透过率导致信号的损失。
3、此外,对于传统的跟踪相机而言,在对信标光捕获跟踪过程中为了保证跟踪的稳定性相机帧频不能随意变动,这也导致了跟踪相机工作的动态范围受限。而大气湍流导致大气折射率不断变化,使得光波的振幅和相位产生随机的起伏造成光强闪烁,当光强起伏过大时会影响跟踪效果。
技术实现思路
1、本发明通过提供一种信标光捕获跟踪方法及系统,解决了现有技术中信标光捕获跟踪的成功率较低、效果较差的问题。
2、本发明提供一种信标光捕获跟踪方法,包括以下步骤:
3、步骤1、信标光捕获跟踪系统的发射端和接收端进行初始对准;
4、步骤2、利用所述发射端的主控模块进行链路预算,并得到预算发射功率;根据所述预算发射功率对脉冲频率和占空比进行初步配置;
5、步骤3、基于当前配置,利用所述发射端中的激光驱动模块为所述发射端中的调制激光器提供脉冲信号,所述调制激光器发出调制信标光信号,并对不确定区域进行扫描;在对所述不确定区域进行扫描的过程中,所述接收端对所述调制信标光信号进行探测;
6、若完成扫描后,所述接收端中的光电探测器没有探测到所述调制信标光信号或所述接收端探测到的所述调制信标光信号的信噪比无法满足预设的捕获跟踪条件,则判定为捕获失败,缩小占空比更新配置后重新执行步骤3;否则,判定为捕获成功,进入步骤4;
7、步骤4、所述光电探测器将探测到的所述调制信标光信号转换为电信号,并传输至所述接收端的fpga模块;所述fpga模块对所述电信号进行整形,并利用整形后得到的脉冲信号驱动所述接收端的cmos感光芯片曝光,使所述cmos感光芯片的曝光时间与所述调制信标光信号时序同步。
8、优选的,所述步骤1中,所述信标光捕获跟踪系统利用gps模块获得位置信息,利用二维旋转平台完成水平方向和俯仰方向的初始指向,实现初始对准。
9、优选的,所述步骤2中,假设所述发射端发射的调制信标光信号的瞬时功率为pt时,所述接收端接收到的调制信标光信号的瞬时功率为pr,进行链路预算时采用的链路方程表示如下:
10、
11、
12、
13、式中,dt为发射天线孔径,dr为接收天线孔径,γ为gamma函数,α、β分别为第一参数、第二参数,σr为归一化光强起伏方差,kα-β为α-β阶第二类修正贝塞尔函数,λ为波长,r为激光传输距离,ηt为发射端的效率,ηa为发射天线孔径照射效率,ltp为发射端的瞄准损失,latm为信道导致的功率损失,lpol为发射天线和接收天线模式失配导致的功率损失,lrp为接收端的瞄准损失,ηr为接收端的收集效率。
14、优选的,结合所述链路方程和所述光电探测器的信噪比得到所述预算发射功率,所述预算发射功率表示为:
15、
16、式中,h为普朗克常量,ν为系统的中心频率,m0为光电探测器的增益因子的最佳值,e为电子电荷,η为每一个入射光子使光阴极发射出的平均电子数,k为波尔兹曼常数,te为温度,rl为阻抗。
17、优选的,所述步骤3中,采用螺旋扫描方式对不确定区域进行扫描。
18、优选的,所述步骤3中,所述更新配置的方式包括:缩小占空比,在所述预算发射功率的基础上增大所述发射端发射的调制信标光信号的瞬时功率,保持所述发射端发出的所述调制信标光信号的平均功率不变。
19、优选的,所述步骤4中,所述fpga模块驱动所述cmos感光芯片曝光时,采用脉冲上升沿触发方式,使所述cmos感光芯片的启动曝光的时刻与所述调制信标光信号的脉冲上升沿同步,实现所述cmos感光芯片的曝光时间与所述调制信标光信号时序同步。
20、优选的,所述步骤4中还包括:利用所述fpga模块对所述cmos感光芯片的曝光的时长进行调整,使所述信标光捕获跟踪系统的信噪比达到最优。
21、优选的,对所述cmos感光芯片的曝光的时长进行调整的具体实现方式包括:
22、设定评价函数,所述评价函数表示为:
23、
24、式中,j为评价函数,pt为发射端发射的调制信标光信号的瞬时功率,k为大气衰减系数,r为激光传输距离,lt为发射端光学透过率损耗,lr为接收端光学透过率损耗,w(λ)为辐射谱函数,δλ为接收光谱带宽,ωr为接收端视场;
25、进行调整的过程中,定义曝光的时长每次改变的步长为ξ,将所述cmos感光芯片的当前曝光的时长设为初始值,利用梯度算法进行更新迭代,直至梯度下降的范围τn-1-τn小于设定值,此时所述信标光捕获跟踪系统的信噪比达到最优;
26、所述梯度下降算法为:
27、
28、sn=sn-1+g2(t)
29、
30、式中,g(t)为梯度向量,sn为第n次迭代后得到的梯度值,sn在0时刻的初始值s0为0,τn为第n次迭代后得到的cmos感光芯片的曝光的时长,σ为非零常数。
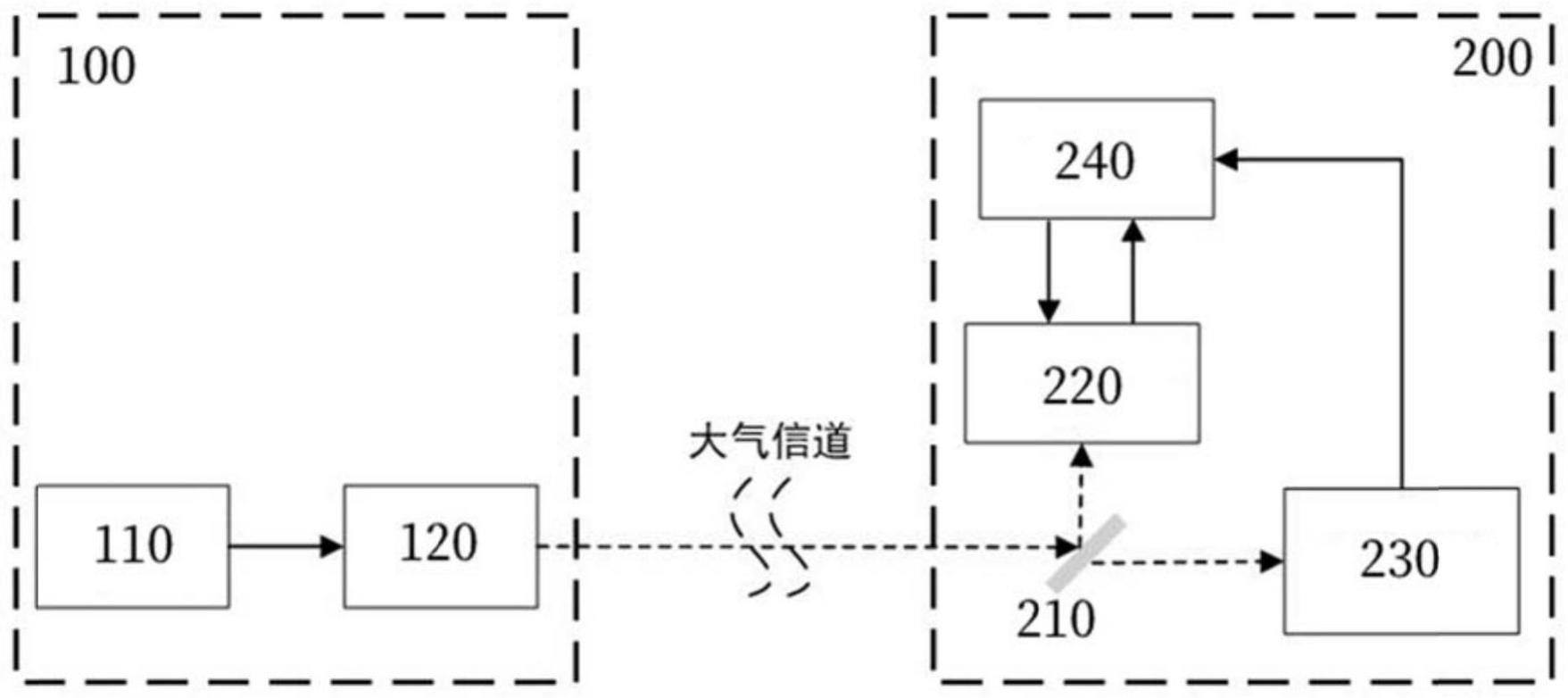
31、另一方面,本发明提供一种信标光捕获跟踪系统,包括:发射端和接收端;所述发射端包括主控模块、激光驱动模块和调制激光器;所述接收端包括fpga电路、cmos感光芯片和光电探测器;所述信标光捕获跟踪系统用于实现如上所述的信标光捕获跟踪方法中的步骤。
32、本发明中提供的一个或多个技术方案,至少具有如下技术效果或优点:
33、(1)本发明的发射端通过链路预算得到预算发射功率,根据预算发射功率对脉冲频率和占空比进行配置,并能够在信标光无法满足捕获跟踪要求时通过缩小占空比调整配置,提高信标光捕获跟踪成功的概率;本发明通过fpga模块驱动cmos感光芯片曝光,使cmos感光芯片的曝光时间与调制信标光信号时序同步,能够保证光信号被cmos感光芯片按时序准确捕捉到,能够有效提高信标光捕获跟踪的效果。
34、(2)本发明不仅利用fpga模块基于脉冲信号对cmos感光芯片的启动曝光的时刻进行控制,实现时序同步,还能够利用fpga模块对cmos感光芯片的曝光的时长进行调整,使信标光捕获跟踪系统的信噪比达到最优。本发明不仅扩大了cmos感光芯片的动态工作范围,能够有效抑制大气湍流造成的光强闪烁,还能够使系统的信噪比达到最优,提高了捕获跟踪效果。
35、(3)现有的提升图像信噪比的方法通常采用图像处理的方式,该方式对图像信噪比改善程度有限,本发明采用脉冲调制的方法可以动态改善信噪比,同时可以在不改变调制信标光信号的平均功率的情况下,在极大程度上减小强背景光的干扰。
- 还没有人留言评论。精彩留言会获得点赞!