基于智能CPE模组的巡检机器人数据传输优化方法与流程
本技术涉及电网通讯,特别涉及基于智能cpe模组的巡检机器人数据传输优化方法。
背景技术:
1、本部分的陈述仅仅是提供了与本技术相关的背景技术信息,不必然构成在先技术。
2、随着应用的巡检机器人智能化水平的提高,高精度的远程操控、大范围的图像识别、高分辨率的实时视频、大范围的传感数据获取、故障识别模型的实时演算都带来了海量的计算任务,对巡检机器人的任务处理能力提出了严峻的考验,如何依托现有通讯资源,利用云边协同将计算任务及时传输至云端,以提高巡检效率以及保证巡检机器人有足够的的冗余算力维持巡检作业,防止其处理器卡顿遗漏巡检目标,保证对每一个巡检作业目标的精细作业成为了我们研究的重点。
技术实现思路
1、为了解决上述问题,本技术提出了基于智能cpe模组的巡检机器人数据传输优化方法,依托遍及全站的通讯资源,及时通过无线资源将计算任务分配至云端,利用云边协同处理合理分配计算任务,在完成计算任务的同时维持巡检机器人算力的冗余性,保证对下一作业目标的有效巡检作业,提高了巡检效率。
2、本技术提供了基于智能cpe模组的巡检机器人数据传输优化方法,基于由巡检规划模块、任务估算和分配模块、智能cpe模块的任务传输优化系统,所述智能cpe模块具备同时接入多个ap的能力,具体包括如下步骤:
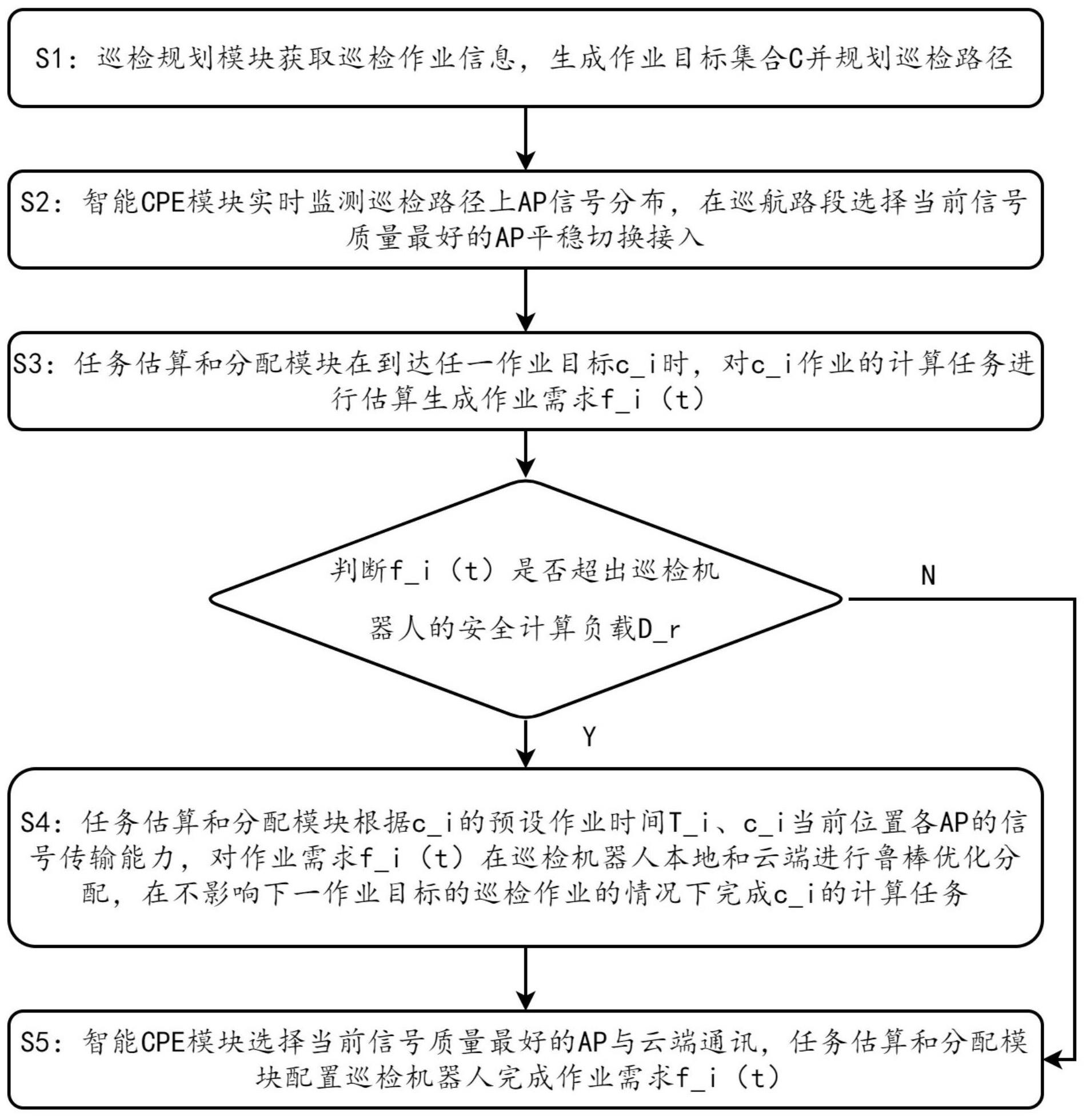
3、s1:巡检规划模块获取巡检作业信息,生成作业目标集合c并规划巡检路径:
4、s2:智能cpe模块实时监测巡检路径上ap信号分布,在巡航路段选择当前信号质量最好的ap平稳切换接入;
5、s3:任务估算和分配模块在到达任一作业目标c_i时,对c_i作业的计算任务进行估算生成作业需求f_i(t),判断f_i(t)是否超出巡检机器人的安全计算负载d_r,若是,跳转到步骤s4,若否,则跳转到步骤s5;
6、s4:任务估算和分配模块根据c_i的预设作业时间t_i、c_i当前位置各ap的信号传输能力,对作业需求f_i(t)在巡检机器人本地和云端进行鲁棒优化分配,在不影响下一作业目标的巡检作业的情况下完成c_i的计算任务;
7、s5:智能cpe模块选择当前信号质量最好的ap与云端通讯,任务估算和分配模块配置巡检机器人完成作业需求f_i(t);
8、所述i为巡检目标集合c中的元素编号,i=1,2,...i,i为作业目标数量;作业需求f_i(t)中t取值[0,t_i]。
9、优选地,所述步骤s2中,所述智能cpe模块根据信号强度指示rssi、信噪比snr、接收功率rx中的任意一种或几种组合来衡量ap的信号质量。
10、优选地,所述步骤s2中,所述智能cpe模块平稳切换接入信号质量最好的ap的方法为:
11、智能cpe模块接入信号质量前二的两路ap信号源,将其加入接入列表,并使用传输质量最好的ap信号源进行数据传输,当接入的信号源信号质量的抖动值超过预设门槛limit1时,切换另一路ap信号源进行数据传输;
12、智能cpe模块根据信号质量实时更新接入列表,具体更新方法为:
13、若需要被移出接入列表的ap信号源空闲则直接移出接入列表,若需要被移出的ap信号源正在传输数据,则首先切换传输信号源,再将其移出接入列表。
14、优选地,所述巡检机器人的安全计算负载dr_i=d_f-dw_i,d_f为巡检机器人的满负荷计算资源,dw_i为作业目标c_i的免计算操作需求以及路径导航需求。
15、优选地,所述任务估算和分配模块对作业目标c_i的计算任务进行估算的具体方法为:
16、根据预设的针对于作业目标c_i的作业流程类比历史操作流程对计算任务进行估算以及根据现场图像识别隐患或故障,再根据预设的历史隐患或故障处理流程对计算任务进行估算。
17、优选地,所述步骤s4中,各ap的信号传输能力的计算方法为:
18、s401:获取上行、下行信道增益;
19、
20、
21、其中,gup_zero为ap距智能cpe模块单位距离时的接收功率,gdw_zero为智能cpe模块的单个接收模块距ap单位距离时的接收功率,s_j为巡检机器人与ap之间的距离,j为作业目标c_i处的ap编号,j=1,2...j,j的取值为信号质量大于预设门槛值limit2的ap数量以及智能cpe模块收发模块的数量中的最小值;
22、s402:计算巡检机器人到各ap的数据传输速率;
23、;
24、其中,bup、txr分别为智能cpe模块的单个发射模块的通讯带宽、发射功率,n为传输过程中的信道噪声的功率谱密度;
25、计算各ap至巡检机器人的数据传输速率:
26、;
27、其中,bdw_j为各ap可用带宽,txa为ap的发射功率,n为传输过程中的信道噪声的功率谱密度。
28、优选地,所述步骤s401中,任务估算和分配模块获取巡检机器人的位置坐标p_i,调取预存于巡检规划模块内的作业现场3d地图,在作业现场3d地图上模拟各ap和巡检机器人之间的传输路径,判断作业现场阻隔物对各传输路径的阻隔度,若阻隔度大于预设门槛值limit3,则通过智能cpe模块对巡检机器人和各ap之间的信道增益进行实际测量修正,若阻隔度小于预设门槛值limit3,则利用步骤s401的公式计算信道增益。
29、优选地,所述任务估算和分配模块对作业需求f_i(t)进行鲁棒优化分配的具体方法为:
30、s411:定义分配至各个ap传输的任务量为ds_j(t),那传输至云端进行计算的任务量为:
31、,
32、巡检机器人的计算任务量为:
33、;
34、s412:计算任务上行传输时间成本:
35、;
36、云端任务执行时间成本:
37、;
38、计算任务下行传输时间成本:
39、;
40、总的时间成本为:
41、t_total(t)=t_up(t)+t_down(t)+t_cl(t);
42、其中,k为云端计算常量,f为云端计算频率,l为返回数据量比例,取值为[0,1],l的数值取决于作业目标c_i执行的任务类型;
43、s413:为了求取传输至云端的计算任务量以及每个ap信号源传输的任务量,定义以下优化公式:
44、
45、
46、
47、
48、;
49、其中,为目标函数,求取各个ap信号源最大的传输任务量,任务量之和即为云端的计算任务量,利用分布式鲁棒算法求解。
50、优选地,若所述步骤s413中的优化公式无解,则对每个ap信号源传输的任务量进行二次优化:
51、
52、
53、
54、
55、;
56、其中,t_(i,i+1)为巡检机器人从作业目标c_i结束位置至到下一个作业目标c_(i+1)起始位置的巡航时间。
57、优选地,所述智能cpe模块还用于巡检机器人的位置定位,基于各ap的位置以及智能cpe模块连接各ap后发送测量信号以对巡检机器人的位置进行定位,具体定位算法包括指纹定位法、tdoa定位法、aoa+ta定位法中的任意一种或几种的组合。
58、与现有技术相比,本技术的有益效果为:
59、本技术通过对作业目标ap信号质量和传输能力的监测,依托可信wi-fi的通讯资源,及时将计算任务分配至云端,利用云边协同处理合理分配计算任务,在完成计算任务的同时维持巡检机器人算力的冗余性,保证对下一作业目标的有效巡检作业,提高了巡检效率。
60、本技术通过鲁棒算法对通过各个ap传输的数据量以及云端计算任务量进行求解,可以对处理过程中作业任务、ap传输能力的不确定性进行平衡,根据各个作业节点的任务不同,合理分配计算任务,增强了分配算法的兼容性和适应性。
- 还没有人留言评论。精彩留言会获得点赞!