相机参数确定方法、尺寸检测方法、装置、设备及介质与流程
本技术涉及计算机视觉,特别是涉及一种相机参数确定方法、尺寸检测方法、装置、设备及介质。
背景技术:
1、随着计算机视觉技术的不断进步,视觉测量的应用越来越广泛。可以通过相机采集包含待测物的图像,以根据相机参数和采集到的图像,确定待测物的真实尺寸,实现对待测物的真实尺寸的测量。
2、然而,如何有效地获取相机参数成为亟待解决的问题。
技术实现思路
1、本技术实施例的目的在于提供一种相机参数确定方法、尺寸检测方法、装置、设备及介质,以有效地获取相机参数。具体技术方案如下:
2、本技术实施的第一方面,提供了一种相机参数确定方法,所述方法包括:
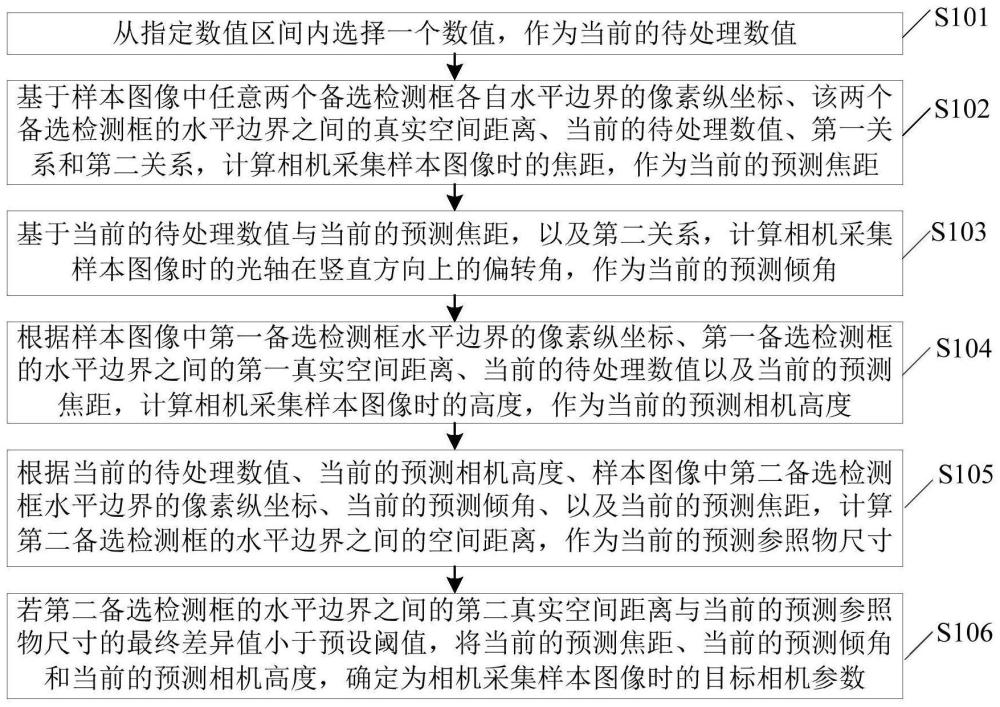
3、从指定数值区间内选择一个数值,作为当前的待处理数值;其中,所述指定数值区间表示:当前待标定的相机采集的样本图像中消失点的像素纵坐标范围;所述指定数值区间的起始点为:基于所述样本图像中参照物的备选检测框的像素纵坐标确定的;
4、基于所述样本图像中任意两个备选检测框各自水平边界的像素纵坐标、该两个备选检测框的水平边界之间的真实空间距离、当前的待处理数值、第一关系和第二关系,计算所述相机采集所述样本图像时的焦距,作为当前的预测焦距;其中,所述第一关系表示:图像坐标系、相机坐标系,以及世界坐标系之间的映射关系;所述第二关系表示:所述相机采集图像时的焦距、光轴在竖直方向上的偏转角,与采集到的图像中消失点的像素纵坐标之间的转换关系;
5、基于当前的待处理数值与当前的预测焦距,以及所述第二关系,计算所述相机采集所述样本图像时的光轴在竖直方向上的偏转角,作为当前的预测倾角;
6、根据所述样本图像中第一备选检测框水平边界的像素纵坐标、所述第一备选检测框的水平边界之间的第一真实空间距离、当前的待处理数值以及当前的预测焦距,计算所述相机采集所述样本图像时的高度,作为当前的预测相机高度;
7、根据当前的待处理数值、当前的预测相机高度、所述样本图像中第二备选检测框水平边界的像素纵坐标、当前的预测倾角、以及当前的预测焦距,计算所述第二备选检测框的水平边界之间的空间距离,作为当前的预测参照物尺寸;
8、若所述第二备选检测框的水平边界之间的第二真实空间距离与当前的预测参照物尺寸的最终差异值小于预设阈值,将当前的预测焦距、当前的预测倾角和当前的预测相机高度,确定为所述相机采集所述样本图像时的目标相机参数。
9、可选的,所述方法还包括:若当前的预测参照物尺寸与所述第二真实空间距离的最终差异值不小于预设阈值,则返回执行所述从指定数值区间内选择一个数值,作为当前的待处理数值的步骤,直至当前的预测参照物尺寸与所述第二真实空间距离的最终差异值小于预设阈值;其中,本次选择的待处理数值与历史每次选择的待处理数值不同。
10、可选的,在所述从指定数值区间内选择一个数值,作为当前的待处理数值之前,所述方法还包括:
11、基于各备选检测框中的指定检测框的上侧水平边界的像素纵坐标,确定所述指定数值区间的起始点;其中,在各备选检测框中,所述指定检测框的上侧水平边界的像素纵坐标最大。
12、可选的,所述方法还包括:
13、对所述样本图像进行目标检测,得到所述样本图像中的多个参照物各自的初始检测框;
14、从确定出的多个初始检测框中选择预设数目个初始检测框,作为备选检测框;其中,所述备选检测框满足以下至少一项条件:每一备选检测框均属于所述样本图像中指定大小的中间图像区域;每一备选检测框的宽高比位于预设宽高比范围;每一备选检测框的面积均属于预设面积范围;其中,所述预设面积范围为基于所述样本图像的面积确定的;任意两个备选检测框的高度差小于预设高度;其中,所述预设高度与所述样本图像的高度呈正相关。
15、可选的,对所述样本图像进行目标检测,得到所述样本图像中的多个参照物各自的初始检测框,包括:基于开集检测方法,对所述样本图像进行目标检测,得到所述样本图像中的多个参照物各自的初始检测框。
16、可选的,所述第一备选检测框为多个;根据所述样本图像中第一备选检测框水平边界的像素纵坐标、所述第一备选检测框的水平边界之间的第一真实空间距离、当前的待处理数值以及当前的预测焦距,计算所述相机采集所述样本图像时的高度,作为当前的预测相机高度,包括:
17、针对每一第一备选检测框,根据该第一备选检测框水平边界的像素纵坐标、当前的待处理数值、该第一备选检测框的水平边界之间的第一真实空间距离、以及当前的预测焦距,计算所述相机采集所述样本图像时的高度,作为该第一备选检测框对应的当前的初始预测相机高度;
18、计算各初始预测相机高度的平均值,得到当前的预测相机高度。
19、可选的,所述针对每一第一备选检测框,根据该第一备选检测框水平边界的像素纵坐标、当前的待处理数值、该第一备选检测框的水平边界之间的第一真实空间距离、以及当前的预测焦距,计算所述相机采集所述样本图像时的高度,作为该第一备选检测框对应的当前的初始预测相机高度,包括:
20、针对每一第一备选检测框,根据该第一备选检测框水平边界的像素纵坐标、当前的待处理数值、该第一备选检测框的水平边界之间的第一真实空间距离、以及当前的预测焦距,按照第一算式,计算所述相机采集所述样本图像时的高度,作为该第一备选检测框对应的当前的初始预测相机高度;
21、其中,所述第一算式如下:
22、
23、s.t.
24、
25、其中,h0表示该第一备选检测框对应的当前的初始预测相机高度;v0表示当前的待处理数值;va表示该第一备选检测框下侧水平边界的像素纵坐标,vb表示该第一备选检测框上侧水平边界的像素纵坐标;s表示所述第一真实空间距离;f表示当前的预测焦距。
26、可选的,所述第二备选检测框为多个;所述根据当前的待处理数值、当前的预测相机高度、所述样本图像中第二备选检测框水平边界的像素纵坐标、当前的预测倾角、以及当前的预测焦距,计算所述第二备选检测框的水平边界之间的空间距离,作为当前的预测参照物尺寸,包括:
27、针对每一第二备选检测框,根据当前的待处理数值、当前的预测相机高度、该第二备选检测框水平边界的像素纵坐标、当前的预测倾角、以及当前的预测焦距,计算该第二备选检测框的水平边界之间的空间距离,作为该第二备选检测框对应的当前的预测参照物尺寸;
28、在所述若所述第二备选检测框的水平边界之间的第二真实空间距离与当前的预测参照物尺寸的最终差异值小于预设阈值,将当前的预测焦距、当前的预测倾角和当前的预测相机高度,确定为所述相机采集所述样本图像时的目标相机参数之前,所述方法还包括:
29、针对每一第二备选检测框,计算该第二备选检测框对应的当前的预测参照物尺寸与该第二备选检测框的水平边界之间的第二真实空间距离的差异值,作为初始差异值;
30、基于各初始差异值,计算当前的预测参照物尺寸与所述第二真实空间距离的最终差异值。
31、可选的,所述针对每一第二备选检测框,根据当前的待处理数值、当前的预测相机高度、该第二备选检测框水平边界的像素纵坐标、当前的预测倾角、以及当前的预测焦距,计算该第二备选检测框的水平边界之间的空间距离,作为该第二备选检测框对应的当前的预测参照物尺寸,包括:
32、针对每一第二备选检测框,根据当前的待处理数值、当前的预测相机高度、该第二备选检测框水平边界的像素纵坐标、当前的预测倾角、以及当前的预测焦距,按照第二算式或第三算式,计算该第二备选检测框的水平边界之间的空间距离,作为该第二备选检测框对应的当前的预测参照物尺寸;
33、其中,所述第二算式为:
34、
35、h表示该第二备选检测框的水平边界之间的空间距离;v0表示当前的待处理数值;h表示当前的预测相机高度;θ表示当前的预测倾角;v1表示基于该第二备选检测框的上侧水平边界的像素纵坐标确定的第一坐标;v2表示基于该第二备选检测框的下侧水平边界的像素纵坐标确定的第二坐标;f表示当前的预测焦距;所述第三算式为:
36、
37、s.t.
38、
39、
40、
41、
42、u1表示基于该第二备选检测框任一竖直边界的像素横坐标确定的第三坐标,u2表示基于该第二备选检测框该竖直边界的像素横坐标确定的第四坐标;(x1,y1)表示:在所述世界坐标系中,(u1,v1)对应的点在x轴和y轴上的坐标值;(x2,y2)表示:在所述世界坐标系中,(u2,v2)对应的点在x轴和y轴上的坐标值。
43、可选的,在所述针对每一第二备选检测框,根据当前的待处理数值、当前的预测相机高度、该第二备选检测框水平边界的像素纵坐标、当前的预测倾角、以及当前的预测焦距,按照第二算式或第三算式,计算该第二备选检测框的水平边界之间的空间距离,作为该第二备选检测框对应的当前的预测参照物尺寸之前,所述方法还包括:基于当前的预测焦距,计算所述相机采集所述样本图像时的视场角,作为当前的预测视场角;根据预设的视场角集和畸变因子集的对应关系,确定当前的预测视场角对应的畸变因子,作为当前的预测畸变因子;针对每一第二备选检测框,根据当前的预测畸变因子,以及该第二备选检测框中任一竖直边界的任一端点的像素纵坐标和像素横坐标,计算该端点对应的矫正系数,作为该端点对应的当前的预测矫正系数;
44、在按照所述第二算式计算该第二备选检测框的水平边界之间的空间距离的情况下,计算该第二备选检测框下侧水平边界的像素纵坐标与该竖直边界的下侧端点对应的当前的预测矫正系数的乘积,作为所述第一坐标;以及计算该第二备选检测框上侧水平边界的像素纵坐标与该竖直边界的上侧端点对应的当前的预测矫正系数的乘积,作为所述第二坐标;
45、在按照所述第三算式计算该第二备选检测框的水平边界之间的空间距离的情况下,计算该第二备选检测框下侧水平边界的像素纵坐标与该竖直边界的下侧端点对应的当前的预测矫正系数的乘积,作为所述第一坐标;以及计算该第二备选检测框上侧水平边界的像素纵坐标与该竖直边界的上侧端点对应的当前的预测矫正系数的乘积,作为所述第二坐标;计算该第二备选检测框该竖直边界的像素横坐标与该竖直边界的下侧端点对应的当前的预测矫正系数的乘积,作为所述第三坐标;以及计算该第二备选检测框该竖直边界的像素横坐标与该竖直边界的上侧端点对应的当前的预测矫正系数的乘积,作为所述第四坐标。
46、可选的,所述针对每一第二备选检测框,根据当前的预测畸变因子,以及该第二备选检测框中任一竖直边界的任一端点的像素纵坐标和像素横坐标,计算该端点对应的矫正系数,作为该端点对应的当前的预测矫正系数,包括:
47、针对每一第二备选检测框,根据当前的预测畸变因子,以及该第二备选检测框中任一竖直边界的任一端点的像素纵坐标和像素横坐标,按照第四算式,计算该端点对应的矫正系数,作为该端点对应的当前的预测矫正系数;其中,第四算式为:
48、
49、其中,r表示该端点对应的当前的预测矫正系数;p表示当前的预测畸变因子;u表示该端点的像素横坐标,v表示该端点的像素纵坐标。
50、可选的,所述基于所述样本图像中任意两个备选检测框各自水平边界的像素纵坐标、该两个备选检测框的水平边界之间的真实空间距离、当前的待处理数值、第一关系和第二关系,计算所述相机采集所述样本图像时的焦距,作为当前的预测焦距,包括:
51、基于所述样本图像中任意两个备选检测框各自水平边界的像素纵坐标、该两个备选检测框的水平边界之间的真实空间距离、当前的待处理数值,按照第五算式,计算所述相机采集所述样本图像时的焦距,作为当前的预测焦距;其中,所述第五算式为基于第一关系和第二关系确定的;所述第五算式为:
52、
53、s.t.
54、
55、n=vb·v0
56、f表示当前的预测焦距;m1和m2分别表示该两个备选检测框各自对应的m值;n1和n2分别表示该两个备选检测框各自对应的n值;针对任一备选检测框,va表示该备选检测框下侧水平边界的像素纵坐标,vb表示该备选检测框上侧水平边界的像素纵坐标;s表示该备选检测框的水平边界之间的真实空间距离;v0表示当前的待处理数值。
57、本技术实施例提供的第二方面,还提供了一种尺寸检测方法,所述方法包括:
58、获取相机采集到的包含待测物的待检测图像;其中,所述相机采集所述待检测图像时的相机参数与采集样本图像时的相机参数一致;
59、对所述待检测图像进行目标检测,得到所述待检测图像中所述待测物的检测框;
60、根据确定出的所述相机采集样本图像时的目标相机参数,以及所述待测物的检测框的水平边界的像素坐标,计算所述待测物的检测框的水平边界之间的空间距离;其中,所述目标相机参数为基于上述任一所述的相机参数确定方法确定的。
61、本技术实施例提供的第三方面,还提供了一种相机参数确定装置,所述装置包括:
62、第一选择模块,用于从指定数值区间内选择一个数值,作为当前的待处理数值;其中,所述指定数值区间表示:当前待标定的相机采集的样本图像中消失点的像素纵坐标范围;所述指定数值区间的起始点为:基于所述样本图像中参照物的备选检测框的像素纵坐标确定的;
63、预测焦距计算模块,用于基于所述样本图像中任意两个备选检测框各自水平边界的像素纵坐标、该两个备选检测框的水平边界之间的真实空间距离、当前的待处理数值、第一关系和第二关系,计算所述相机采集所述样本图像时的焦距,作为当前的预测焦距;其中,所述第一关系表示:图像坐标系、相机坐标系,以及世界坐标系之间的映射关系;所述第二关系表示:所述相机采集图像时的焦距、光轴在竖直方向上的偏转角,与采集到的图像中消失点的像素纵坐标之间的转换关系;
64、预测倾角计算模块,用于基于当前的待处理数值与当前的预测焦距,以及所述第二关系,计算所述相机采集所述样本图像时的光轴在竖直方向上的偏转角,作为当前的预测倾角;
65、预测相机高度计算模块,用于根据所述样本图像中第一备选检测框水平边界的像素纵坐标、所述第一备选检测框的水平边界之间的第一真实空间距离、当前的待处理数值以及当前的预测焦距,计算所述相机采集所述样本图像时的高度,作为当前的预测相机高度;
66、预测参照物尺寸计算模块,用于根据当前的待处理数值、当前的预测相机高度、所述样本图像中第二备选检测框水平边界的像素纵坐标、当前的预测倾角、以及当前的预测焦距,计算所述第二备选检测框的水平边界之间的空间距离,作为当前的预测参照物尺寸;
67、目标相机参数确定模块,用于若所述第二备选检测框的水平边界之间的第二真实空间距离与当前的预测参照物尺寸的最终差异值小于预设阈值,将当前的预测焦距、当前的预测倾角和当前的预测相机高度,确定为所述相机采集所述样本图像时的目标相机参数。
68、可选的,所述装置还包括:第二选择模块,用于若当前的预测参照物尺寸与所述第二真实空间距离的最终差异值不小于预设阈值,则返回执行所述从指定数值区间内选择一个数值,作为当前的待处理数值的步骤,直至当前的预测参照物尺寸与所述第二真实空间距离的最终差异值小于预设阈值;其中,本次选择的待处理数值与历史每次选择的待处理数值不同。
69、可选的,所述装置还包括:起始点确定模块,用于在所述从指定数值区间内选择一个数值,作为当前的待处理数值之前,基于各备选检测框中的指定检测框的上侧水平边界的像素纵坐标,确定所述指定数值区间的起始点;其中,在各备选检测框中,所述指定检测框的上侧水平边界的像素纵坐标最大。
70、可选的,所述装置还包括:目标检测模块,用于对所述样本图像进行目标检测,得到所述样本图像中的多个参照物各自的初始检测框;
71、备选检测框确定模块,用于从确定出的多个初始检测框中选择预设数目个初始检测框,作为备选检测框;其中,所述备选检测框满足以下至少一项条件:每一备选检测框均属于所述样本图像中指定大小的中间图像区域;每一备选检测框的宽高比位于预设宽高比范围;每一备选检测框的面积均属于预设面积范围;其中,所述预设面积范围为基于所述样本图像的面积确定的;任意两个备选检测框的高度差小于预设高度;其中,所述预设高度与所述样本图像的高度呈正相关。
72、可选的,所述目标检测模块,具体用于基于开集检测方法,对所述样本图像进行目标检测,得到所述样本图像中的多个参照物各自的初始检测框。
73、可选的,所述第一备选检测框为多个;所述预测相机高度计算模块,包括:
74、第一计算子模块,用于针对每一第一备选检测框,根据该第一备选检测框水平边界的像素纵坐标、当前的待处理数值、该第一备选检测框的水平边界之间的第一真实空间距离、以及当前的预测焦距,计算所述相机采集所述样本图像时的高度,作为该第一备选检测框对应的当前的初始预测相机高度;
75、第二计算子模块,用于计算各初始预测相机高度的平均值,得到当前的预测相机高度。
76、可选的,所述第一计算子模块,具体用于针对每一第一备选检测框,根据该第一备选检测框水平边界的像素纵坐标、当前的待处理数值、该第一备选检测框的水平边界之间的第一真实空间距离、以及当前的预测焦距,按照第一算式,计算所述相机采集所述样本图像时的高度,作为该第一备选检测框对应的当前的初始预测相机高度;其中,所述第一算式如下:
77、
78、s.t.
79、
80、其中,h0表示该第一备选检测框对应的当前的初始预测相机高度;v0表示当前的待处理数值;va表示该第一备选检测框下侧水平边界的像素纵坐标,vb表示该第一备选检测框上侧水平边界的像素纵坐标;s表示所述第一真实空间距离;f表示当前的预测焦距。
81、可选的,所述第二备选检测框为多个;所述预测参照物尺寸计算模块,包括:
82、第三计算子模块,用于针对每一第二备选检测框,根据当前的待处理数值、当前的预测相机高度、该第二备选检测框水平边界的像素纵坐标、当前的预测倾角、以及当前的预测焦距,计算该第二备选检测框的水平边界之间的空间距离,作为该第二备选检测框对应的当前的预测参照物尺寸;
83、所述装置还包括:初始差异值计算模块,用于在所述若所述第二备选检测框的水平边界之间的第二真实空间距离与当前的预测参照物尺寸的最终差异值小于预设阈值,将当前的预测焦距、当前的预测倾角和当前的预测相机高度,确定为所述相机采集所述样本图像时的目标相机参数之前,针对每一第二备选检测框,计算该第二备选检测框对应的当前的预测参照物尺寸与该第二备选检测框的水平边界之间的第二真实空间距离的差异值,作为初始差异值;最终差异值计算模块,用于基于各初始差异值,计算当前的预测参照物尺寸与所述第二真实空间距离的最终差异值。
84、可选的,所述第三计算子模块,具体用于针对每一第二备选检测框,根据当前的待处理数值、当前的预测相机高度、该第二备选检测框水平边界的像素纵坐标、当前的预测倾角、以及当前的预测焦距,按照第二算式或第三算式,计算该第二备选检测框的水平边界之间的空间距离,作为该第二备选检测框对应的当前的预测参照物尺寸;其中,所述第二算式为:
85、
86、h表示该第二备选检测框的水平边界之间的空间距离;v0表示当前的待处理数值;h表示当前的预测相机高度;θ表示当前的预测倾角;v1表示基于该第二备选检测框的上侧水平边界的像素纵坐标确定的第一坐标;v2表示基于该第二备选检测框的下侧水平边界的像素纵坐标确定的第二坐标;f表示当前的预测焦距;所述第三算式为:
87、
88、s.t.
89、
90、
91、
92、
93、u1表示基于该第二备选检测框任一竖直边界的像素横坐标确定的第三坐标,u2表示基于该第二备选检测框该竖直边界的像素横坐标确定的第四坐标;(x1,y1)表示:在所述世界坐标系中,(u1,v1)对应的点在x轴和y轴上的坐标值;(x2,y2)表示:在所述世界坐标系中,(u2,v2)对应的点在x轴和y轴上的坐标值。
94、可选的,所述装置还包括:预测视场角计算模块,用于在所述针对每一第二备选检测框,根据当前的待处理数值、当前的预测相机高度、该第二备选检测框水平边界的像素纵坐标、当前的预测倾角、以及当前的预测焦距,按照第二算式或第三算式,计算该第二备选检测框的水平边界之间的空间距离,作为该第二备选检测框对应的当前的预测参照物尺寸之前,基于当前的预测焦距,计算所述相机采集所述样本图像时的视场角,作为当前的预测视场角;
95、预测畸变因子计算模块,用于根据预设的视场角集和畸变因子集的对应关系,确定当前的预测视场角对应的畸变因子,作为当前的预测畸变因子;
96、预测矫正系数计算模块,用于针对每一第二备选检测框,根据当前的预测畸变因子,以及该第二备选检测框中任一竖直边界的任一端点的像素纵坐标和像素横坐标,计算该端点对应的矫正系数,作为该端点对应的当前的预测矫正系数;
97、第一矫正模块,用于在按照所述第二算式计算该第二备选检测框的水平边界之间的空间距离的情况下,计算该第二备选检测框下侧水平边界的像素纵坐标与该竖直边界的下侧端点对应的当前的预测矫正系数的乘积,作为所述第一坐标;以及计算该第二备选检测框上侧水平边界的像素纵坐标与该竖直边界的上侧端点对应的当前的预测矫正系数的乘积,作为所述第二坐标;
98、第二矫正模块,用于在按照所述第三算式计算该第二备选检测框的水平边界之间的空间距离的情况下,计算该第二备选检测框下侧水平边界的像素纵坐标与该竖直边界的下侧端点对应的当前的预测矫正系数的乘积,作为所述第一坐标;以及计算该第二备选检测框上侧水平边界的像素纵坐标与该竖直边界的上侧端点对应的当前的预测矫正系数的乘积,作为所述第二坐标;计算该第二备选检测框该竖直边界的像素横坐标与该竖直边界的下侧端点对应的当前的预测矫正系数的乘积,作为所述第三坐标;以及计算该第二备选检测框该竖直边界的像素横坐标与该竖直边界的上侧端点对应的当前的预测矫正系数的乘积,作为所述第四坐标。
99、可选的,所述预测矫正系数计算模块,具体用于针对每一第二备选检测框,根据当前的预测畸变因子,以及该第二备选检测框中任一竖直边界的任一端点的像素纵坐标和像素横坐标,按照第四算式,计算该端点对应的矫正系数,作为该端点对应的当前的预测矫正系数;其中,第四算式为:
100、
101、其中,r表示该端点对应的当前的预测矫正系数;p表示当前的预测畸变因子;u表示该端点的像素横坐标,v表示该端点的像素纵坐标。
102、可选的,所述预测焦距计算模块,具体用于基于所述样本图像中任意两个备选检测框各自水平边界的像素纵坐标、该两个备选检测框的水平边界之间的真实空间距离、当前的待处理数值,按照第五算式,计算所述相机采集所述样本图像时的焦距,作为当前的预测焦距;其中,所述第五算式为基于第一关系和第二关系确定的;所述第五算式为:
103、
104、s.t.
105、
106、n=vb·v0
107、f表示当前的预测焦距;m1和m2分别表示该两个备选检测框各自对应的m值;n1和n2分别表示该两个备选检测框各自对应的n值;针对任一备选检测框,va表示该备选检测框下侧水平边界的像素纵坐标,vb表示该备选检测框上侧水平边界的像素纵坐标;s表示该备选检测框的水平边界之间的真实空间距离;v0表示当前的待处理数值。
108、本技术实施的又一方面,还提供了一种尺寸检测装置,所述装置包括:
109、待检测图像获取模块,用于获取相机采集到的包含待测物的待检测图像;其中,所述相机采集所述待检测图像时的相机参数与采集样本图像时的相机参数一致;
110、检测框确定模块,用于对所述待检测图像进行目标检测,得到所述待检测图像中所述待测物的检测框;
111、空间距离计算模块,用于根据确定出的所述相机采集样本图像时的目标相机参数,以及所述待测物的检测框的水平边界的像素坐标,计算所述待测物的检测框的水平边界之间的空间距离;其中,所述目标相机参数为基于上述任一所述的相机参数确定方法确定的。
112、本技术实施的又一方面,还提供了一种电子设备,包括:
113、存储器,用于存放计算机程序;
114、处理器,用于执行存储器上所存放的程序时,实现上述任一所述的相机参数确定方法或者尺寸检测方法。
115、本技术实施的又一方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述任一所述的相机参数确定方法或者尺寸检测方法。
116、本技术实施例还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述任一所述的相机参数确定方法或者尺寸检测方法。
117、本技术实施例提供的一种相机参数确定方法,可以从指定数值区间内选择一个数值,作为当前的待处理数值;其中,指定数值区间表示:当前待标定的相机采集的样本图像中消失点的像素纵坐标范围;指定数值区间的起始点为:基于样本图像中参照物的备选检测框的像素纵坐标确定的;基于样本图像中任意两个备选检测框各自水平边界的像素纵坐标、该两个备选检测框的水平边界之间的真实空间距离、当前的待处理数值、第一关系和第二关系,计算相机采集所述样本图像时的焦距,作为当前的预测焦距;其中,第一关系表示:图像坐标系、相机坐标系,以及世界坐标系之间的映射关系;第二关系表示:相机采集图像时的焦距、光轴在竖直方向上的偏转角,与采集到的图像中消失点的像素纵坐标之间的转换关系;基于当前的待处理数值与当前的预测焦距,以及第二关系,计算相机采集样本图像时的光轴在竖直方向上的偏转角,作为当前的预测倾角;根据样本图像中第一备选检测框水平边界的像素纵坐标、第一备选检测框的水平边界之间的第一真实空间距离、当前的待处理数值以及当前的预测焦距,计算相机采集样本图像时的高度,作为当前的预测相机高度;根据当前的待处理数值、当前的预测相机高度、样本图像中第二备选检测框水平边界的像素纵坐标、当前的预测倾角、以及当前的预测焦距,计算第二备选检测框的水平边界之间的空间距离,作为当前的预测参照物尺寸;若所述第二备选检测框的水平边界之间的第二真实空间距离与当前的预测参照物尺寸的最终差异值小于预设阈值,将当前的预测焦距、当前的预测倾角和当前的预测相机高度,确定为所述相机采集所述样本图像时的目标相机参数。
118、基于上述处理,可以根据当前待标定的相机采集到的图像(即样本图像)中的参照物的检测框(即备选检测框)的像素纵坐标,确定指定数值区间的起始点。即,可以根据样本图像中的参照物的位置确定消失点的像素纵坐标范围。从指定数值区间中选择一个数值(即待处理数值),以计算相机采集样本图像时的相机参数。
119、若基于当前确定出的相机参数计算得到的参照物的备选检测框的水平边界之间的空间距离(即当前的预测参照物尺寸)和参照物的备选检测框的水平边界之间的真实空间距离(即第二真实空间距离)的最终差异值小于预设阈值,则表明当前选择的待处理数值能够表示相机采集样本图像时消失点的真实位置、当前确定出的预测相机高度能够表示相机采集样本图像时的真实高度、当前确定出的预测倾角能够表示相机采集样本图像时的光轴在竖直方向上的真实偏转角,且当前确定出的预测焦距能够表示相机采集样本图像时的真实焦距。如此,也就能够根据样本图像中的参照物,有效地确定相机采集样本图像时的相机参数。
120、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!