智能网联汽车网络攻击检测、安全状态估计及控制方法
本发明涉及智能网联汽车安全与自动驾驶,特别是涉及一种基于云平台的智能网联汽车网络攻击检测、安全状态估计及控制方法。背景领域随着无线通信和传感技术的发展,智能网联汽车将通过车辆网络与周围其他车辆共享其本地传感器测量数据,从而提高智能交通系统的安全性、效率和吞吐量;横向控制是智能网联汽车的关键技术之一,其旨在如何设计控制律以使智能网联汽车准确、平稳地遵循预先计划的参考路径而行驶。智能网联汽车的轨迹跟踪研究方法通常是,根据车辆的状态信息、周围其他车辆信息和周边环境信息,规划理想的参考轨迹,然后通过对智能网联汽车的横向和纵向控制对理想的参考轨迹进行跟踪控制。文献1(f.wang and y.chen,"anovel hierarchical flocking control framework for connected and automatedvehicles,"in ieee transactions on intelligent transportation systems,vol.22,no.8,pp.4801-4812,aug.2021.)出了一种新型的多辆互联自动车辆的分层植群控制框架,通过基于共享信息对多辆互联自动车辆进行控制,并通过试验验证了该方法的有效性。文献2(s.wei,y.zou,x.zhang,t.zhang and x.li,"an integrated longitudinal andlateral vehicle following control system with radar and vehicle-to-vehiclecommunication,"in ieee transactions on vehicular technology,vol.68,no.2,pp.1116-1127,feb.2019.)提出一种采用车载雷达传感器和车对车通信的控制框架,实现了车辆纵向和横向的自动跟随,通过多种工况下的仿真和试验验证所提方法的鲁棒性和适应性。为了实现车辆的轨迹跟踪控制,需要有高精度导航信息。目前先进的高精度导航方法大多采用多传感器融合技术。除此之外,智能网联汽车现在能够与周围车辆和路边单位共享其本地传感器信息,以提高感知和定位的精度。因此,为了实现安全驾驶,必须保证车载传感器的精度和通信网络的安全。然而,由于缺乏集中管理,车载传感器使车辆系统容易受到拒绝服务、虚假信息注入和重放等网络攻击。通信网络也为攻击者提供干扰交通系统正常运行的机会。鉴于此,本发明提出一种基于云平台的智能网联汽车网络攻击检测、安全状态估计及控制方法,确保车辆安全行驶。
背景技术:
技术实现思路
1、本发明的目的是为了解决智能网联汽车在进行轨迹跟踪时遭受网络攻击和恶意车辆干扰的控制问题,提供一种基于云平台的智能网联汽车网络攻击检测、安全状态估计及控制方法,能够使智能网联汽车在传感器遭受网络攻击和恶意车辆存在时仍能进行有效的轨迹跟踪控制。
2、本发明包括以下步骤:
3、步骤1:建立准确表征网络攻击和恶意车辆的传感器量测模型:对智能网联汽车(被控车辆)的虚假信息注入攻击、拒绝服务攻击和重放攻击进行建模,对其周围邻居智能网联汽车(邻居车辆群)传感器测量进行建模,考虑恶意车辆和虚假车辆存在;
4、第一步,建立准确表征被控车辆遭受网络攻击的gps传感器量测方程;
5、第二步,建立准确表征邻居车辆群中存在恶意车辆和虚假车辆的gps传感器量测方程;
6、第三步,利用被控车辆的雷达测量与邻居车辆的距离,并将邻居车辆群的传感器测量值和被控车辆的传感器测量值一同上传云平台;
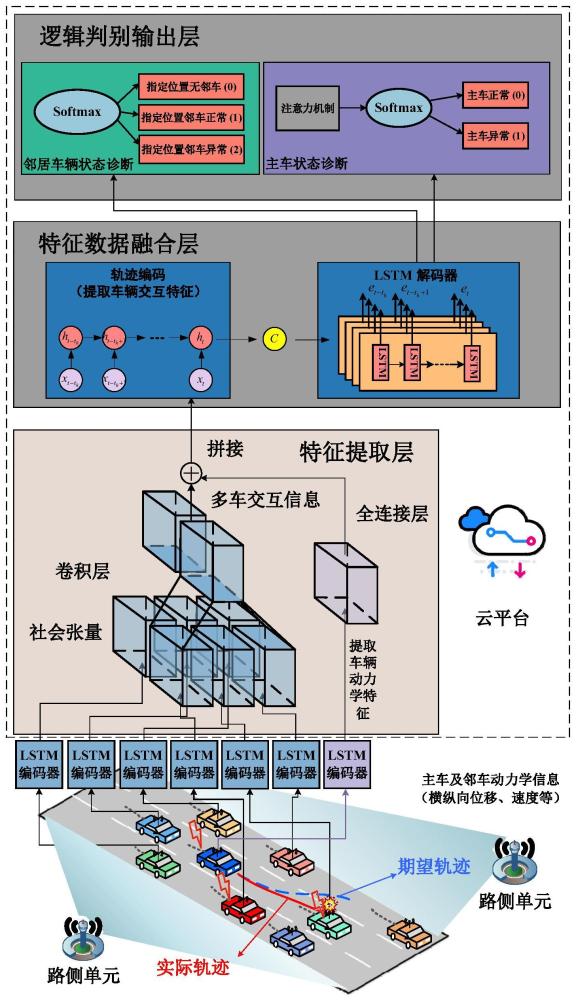
7、步骤2:设计基于卷积交互层的车辆行驶运动状态异常检测方法:云平台收集被控车辆和邻居车辆群的传感器信息,使用最小-最大正则化方法对收集到的数据进行处理;而后通过特征提取层、特征数据融合层和逻辑判别输出层对处理后的数据进行诊断,最终判断被控车辆和邻居车辆的状态;
8、第一步,云平台基于固定长度的滑动窗口方式收集被控车辆和邻居车辆群的传感器信息,并使用最小-最大正则化方法对收集到的数据进行处理;
9、第二步,将处理后的数据输入lstm编码器,提取车辆的动力学特征;
10、第三步,定义一个基于车道的网格来构建交互张量,并在被控车辆周围定义一个(2×3)空间网格;根据邻居车辆的相对空间位置,将相邻车辆分为左前车、左后车、前车、后车、右前车和右后车,分别输入到相应的网格位置;在交互张量上使用卷积网络学习交互张量空间网格中的局部有用特征;
11、第四步,使用卷积后的交互张量作为邻居车辆状态判断模块的输入,将其传递给解码器诊断邻居车辆的状态;将被控车辆的lstm状态和卷积后的交互张量拼接作为被控车辆状态判断模块的输入,然后将其传递给基于注意力机制的解码器诊断被控车辆的状态;
12、步骤3:设计基于多车传感器信息融合的攻击隔离及被控车辆行驶运动状态安全估计方法:利用步骤2提供的被控车辆和邻居车辆的诊断结果,舍弃恶意车辆和受网络攻击影响的传感器信息,保留正常状态的传感器信息;对保留的传感器信息求均值,得到被控车辆独立于网络攻击的有界行驶运动状态估计;
13、第一步,基于步骤2得出的诊断结果,判断被控车辆及邻居车辆的状态;被控车辆有正常和异常两个状态,用0和1表示;在指定网格位置上的邻居车辆包含三个状态,分别是无车、有车正常和有车异常,用0、1和2表示;
14、第二步,当发现被控车辆遭受网络攻击或邻居车辆群中存在恶意车辆时,舍弃异常的传感器数据,保留正常状态的传感器信息,并对保留的传感器信息求均值,得到被控车辆独立于网络攻击的有界状态估计;
15、步骤4:设计基于网络攻击检测的模型预测控制器的目标函数和约束条件,以控制车辆在网络攻击干扰和恶意车辆存在情况下跟踪期望轨迹的偏差尽可能小;
16、第一步,建立准确表征智能网联汽车行为机理的运动学模型,化简得智能网联汽车非线性状态空间方程;
17、第二步,对上述非线性状态空间方程运用一阶差商法近似离散化,得到非线性离散状态方程;
18、第四步,对非线性离散状态空间方程线性化,得到线性离散状态方程;
19、第五步,融合有界行驶运动状态估计数据和imu传感器数据;
20、第六步,根据所建立的预测输出表达式在预测时域内对系统的输出状态进行预测;
21、第七步,考虑到智能网联汽车在遭受网络攻击和恶意车辆干扰时,容易出现失稳现象,对控制量和控制增量进行约束;
22、第八步,设计目标函数,在每一个控制周期内完成求解后得到实际的控制输入量作用与系统;进入下一个控制周期后,重复上述过程,如此循环实现对车辆的轨迹跟踪控制。
23、本发明通过车载传感系统和车对车通信采集智能网联汽车的行驶状态信息和周围智能网联汽车行驶状态信息,考虑传感器遭受网络攻击和车对车通信中存在恶意车辆上传虚假行驶状态信息,建立基于云平台的智能网联汽车网络攻击检测、安全状态估计及控制方法。本发明解决智能网联汽车在进行轨迹跟踪时遭受网络攻击和恶意车辆干扰的控制问题,能够使智能网联汽车在传感器遭受网络攻击和恶意车辆存在时仍能进行有效的轨迹跟踪控制,确保车辆安全行驶。
- 还没有人留言评论。精彩留言会获得点赞!