基站位置标定方法、设备控制方法、定位方法与流程
本技术涉及通信,特别是涉及一种基站位置标定方法、自移动设备控制方法、定位方法、计算机设备、存储介质和计算机程序产品。
背景技术:
1、全球导航卫星系统(global navigation satellite system,gnss)是一种广泛使用的定位技术,可在室外开阔区域提供高精度的定位服务。然而,在室内应急场景中,例如,地震室内救援、矿难救援、洞穴救援或者室内和隧道内作战,无法使用传统的gnss进行终端定位,这是因为在这些室内应急场景中由于建筑物对gnss信号的遮挡导致gnss信号不可用。对于地震室内救援和矿难救援,由于现有的室内定位设施极有可能已被毁坏,因而无法使用现有的室内定位设施进行终端定位,对于洞穴救援或者室内和隧道内作战,由于是陌生环境,没有已经部署的室内定位设施,因而也无法进行终端定位,综上所述,由于现有室内定位设施已被毁坏或者没有事先部署室内定位设施,在上述室内应急场景无法进行终端定位。
2、为在上述室内应急场景中进行终端定位,一种可行的方案是在救援人员或作战人员进入作业区域前使用无人机或无人车等设备在作业区域中部署室内定位设施,传统技术中通常分为3个实施步骤,即先进行室内定位设施的部署,然后使用全站仪进行室内定位设施的位置标定,最后进行终端定位。传统技术中的基站位置标定步骤较多,且使用全站仪进行室内定位设施位置标定,全站仪作为一种专业的测绘设备需要专业的测绘人员使用且费时费力。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够简化操作的基站位置标定方法、自移动设备控制方法、定位方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
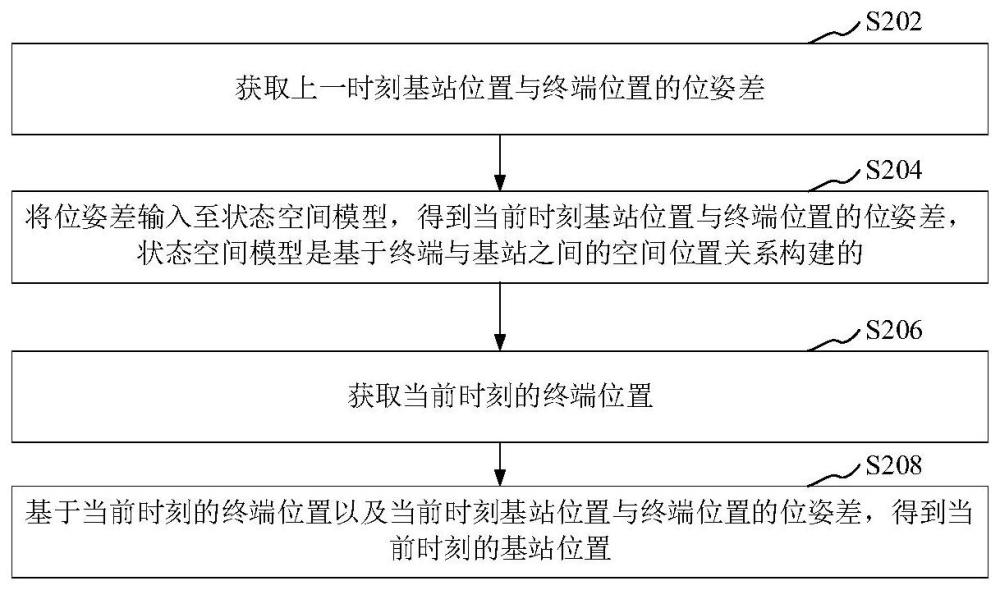
2、第一方面,本技术提供一种基站位置标定方法,所述方法包括:
3、获取上一时刻基站与终端的位置差和速度差;
4、将所述位置差和速度差输入至状态空间模型,得到当前时刻所述基站与终端的位置差,所述状态空间模型是基于终端与基站之间的空间位置关系构建的;
5、获取所述当前时刻的终端位置;
6、基于所述当前时刻的终端位置以及所述当前时刻所述基站与终端的位置差,得到所述当前时刻的基站位置。
7、在其中一个实施例中,所述获取状态空间模型之前,还包括:
8、获取噪声输入矩阵和状态噪声;
9、确定当前时刻的位置差和速度差与上一时刻的位置差和速度差、状态转移矩阵、所述噪声输入矩阵、状态噪声、所述终端当前时刻的位置和速度与所述终端上一时刻的位置和速度的关系,得到位置差追踪模型;
10、确定当前时刻的到达时间的观测值与各当前时刻的位置差和速度差、当前时刻的观测噪声的关系,得到观测模型;
11、基于所述位置差追踪模型和所述观测模型得到状态空间模型。
12、在其中一个实施例中,所述将所述位置差和速度差输入至所述状态空间模型,得到当前时刻所述基站与终端的位置差,包括:
13、将上一时刻的所述位置差和速度差输入至所述位置差追踪模型,得到候选位置差;
14、将所述候选位置差输入至所述观测模型,得到到达时间的观测值;
15、基于所述观测值以及观测噪声的协方差矩阵,得到所述基站位置与终端位置之间的候选位置差的概率;
16、基于所述概率以及各所述候选位置差的上一时刻的权重,更新所述候选位置差的当前时刻的权重;
17、基于更新后的权重,对所述候选位置差进行滤波,得到所述当前时刻对应的所述基站与终端的位置差。
18、第二方面,本技术还提供一种自移动设备控制方法,所述自移动设备控制方法包括:
19、控制所述自移动设备在作业区域移动,且通过所述自移动设备上搭载的即时定位与地图构建设备采集所述自移动设备上搭载的终端的终端位置;
20、基于所述终端位置获取所述自移动设备的移动距离;
21、在所述移动距离等于预设距离时,控制所述自移动设备抛下一基站,并基于上述的基站位置标定方法对抛下的基站的位置进行标定;
22、当所述自移动设备中所携带的基站未抛完时,将所述移动距离归零后,继续执行控制所述自移动设备在作业区域移动的步骤,直至所述自移动设备中所携带的基站均抛完;
23、当所述自移动设备中所携带的基站均抛完时,控制所述自移动设备返航。
24、在其中一个实施例中,所述控制所述自移动设备返航之前,还包括:
25、判断所述自移动设备是否满足返航条件,所述返航条件为任意一所述基站的基站位置与任意一所述终端的终端位置的位置差值的估计误差小于或等于所述基站的标定精度;
26、当所述自移动设备满足返航条件时,继续执行控制所述自移动设备返航的步骤。
27、在其中一个实施例中,所述方法还包括:
28、当所述自移动设备不满足返航条件时,控制所述自移动设备移动至导致所述自移动设备不满足返航条件的目标基站处,并绕所述目标基站移动;
29、在所述自移动设备绕所述目标基站移动的过程中,基于上述的基站位置标定方法对所述目标基站的位置进行重新标定,直至所述自移动设备满足返航条件。
30、在其中一个实施例中,所述判断所述自移动设备是否满足返航条件之前,还包括:
31、获取当前时刻任意一所述基站的基站位置与任意一所述终端的终端位置的位置差值;
32、获取各候选位置差,所述候选位置差是将上一时刻的所述基站与终端的位置差和速度差,输入至空间状态模型中的位置差追踪模型得到的;
33、基于所述候选位置差以及所述位置差值,得到任意一所述基站的基站位置与任意一所述终端的终端位置的位置差值的估计误差。
34、第三方面,本技术还提供一种定位方法,所述定位方法包括:
35、获取基于上述的基站位置标定方法中标定的基站的位置;
36、基于标定的基站的位置对待定位设备进行定位。
37、第四方面,本技术还提供一种基站位置标定装置,所述装置包括:
38、第一差值获取模块,用于获取上一时刻基站与终端的位置差和速度差;
39、第二差值获取模块,用于将所述位置差和速度差输入至状态空间模型,得到当前时刻所述基站与终端的位置差,所述状态空间模型是基于终端与基站之间的空间位置关系构建的;
40、终端位置获取模块,用于获取所述当前时刻的终端位置;
41、第一基站位置标定模块,用于基于所述当前时刻的终端位置以及所述当前时刻所述基站与终端的位置差,得到所述当前时刻的基站位置。
42、第五方面,本技术还提供一种自移动设备控制装置,所述自移动设备控制装置包括:
43、终端位置采集模块,用于控制所述自移动设备在作业区域移动,且通过所述自移动设备上搭载的即时定位与地图构建设备采集所述自移动设备上搭载的终端的终端位置;
44、移动距离获取模块,用于基于所述终端位置获取所述自移动设备的移动距离;
45、第二基站位置标定模块,用于在所述移动距离等于预设距离时,控制所述自移动设备抛下一基站,并基于上述的基站位置标定装置对抛下的基站的位置进行标定;当所述自移动设备中的还存在基站时,将所述移动距离归零后,继续执行控制所述自移动设备在作业区域移动的步骤;
46、返航模块,用于当所述自移动设备中不存在基站时,控制所述自移动设备返航。
47、第六方面,本技术还提供一种定位装置,所述定位装置包括:
48、基站位置获取模块,用于获取基于上述的基站位置标定装置中标定的基站的位置;
49、定位模块,用于基于标定的基站的位置对待定位设备进行定位。
50、第七方面,本技术还提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述的任意一个实施例中的方法的步骤。
51、第八方面,本技术还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的任意一个实施例中的方法的步骤。
52、第九方面,本技术还提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述的任意一个实施例中的方法的步骤。
53、上述基站位置标定方法、自移动设备控制方法、定位方法、装置、计算机设备、存储介质和计算机程序产品,基于上一时刻的基站与终端的位置差和速度差和状态空间模型可以确定当前时刻的基站与终端的位置差,且可以采集获取到当前时刻的终端位置,这样基于当前时刻的终端位置以及当前时刻所述基站与终端的位置差,得到所述当前时刻的基站位置,不需要进行复杂的步骤操作,也不必引入专业的测绘设备,简化操作。
- 还没有人留言评论。精彩留言会获得点赞!