应用于助听器的语音音频处理方法及系统与流程
本发明涉及助听器,具体是涉及应用于助听器的语音音频处理方法及系统。
背景技术:
1、助听器是一种专门为耳聋患者设计的电子设备。它能将外界的声音放大并调整,以补偿耳聋患者的听力损失,是帮助听力患者改善听力困难的有效工具。随着电子技术的快速发展及听力学领域研究的长足进步,助听器技术突飞猛进地提高。听力损失患者也逐步开始关注助听器的质量和性能,他们的要求从最初的“能够听到”发展到现在“不但能够听到还要能够听清”。数字助听器以其低噪声、低失真、节能、小型化、可调性强等特点,成为听损患者的希望。
2、而实际环境中声源和噪声源的位置在不断变化,而且可能会存在多个感兴趣的声源和需要抑制的噪声源,现有的语音音频处理方法无法满足于对不断变化的声源和噪声源进行适应性调整,同时,无法精准调整多麦克风获取声信号的时差,对于声音补偿的效果有待提升。
技术实现思路
1、为解决上述技术问题,提供应用于助听器的语音音频处理方法及系统,本技术方案解决了上述背景技术中提出的实际环境中声源和噪声源的位置在不断变化,而且可能会存在多个感兴趣的声源和需要抑制的噪声源,现有的语音音频处理方法无法满足于对不断变化的声源和噪声源进行适应性调整,同时,无法精准调整多麦克风获取声信号的时差,对于声音补偿的效果有待提升的问题。
2、为达到以上目的,本发明采用的技术方案为:
3、应用于助听器的语音音频处理方法,包括:
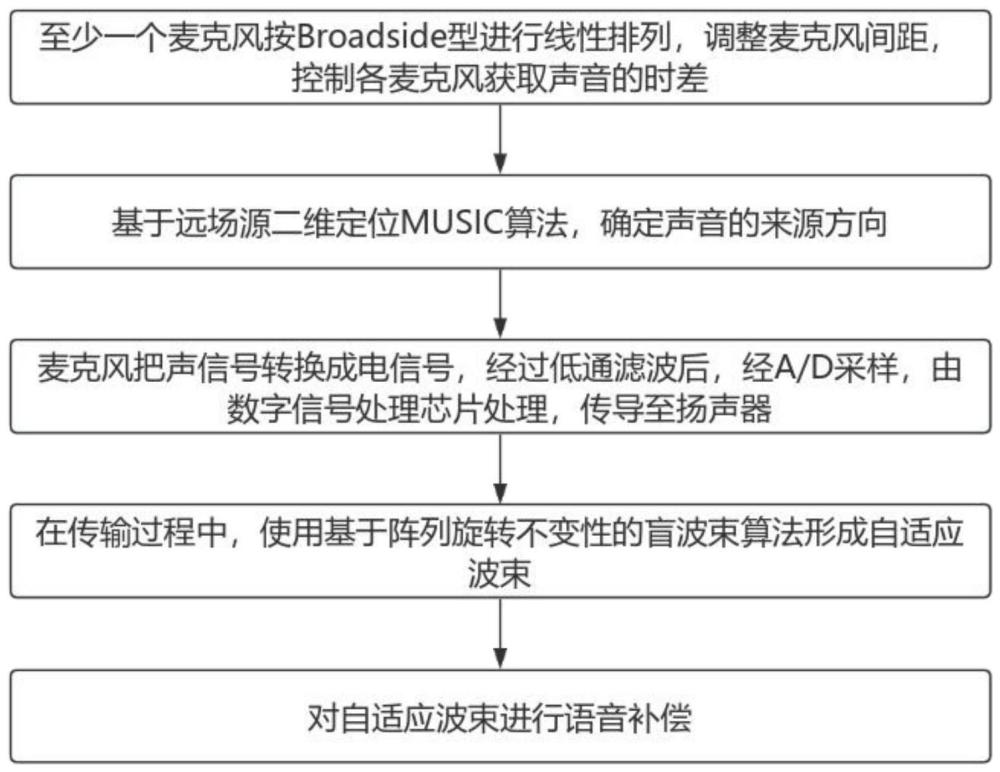
4、至少一个麦克风按broadside型进行线性排列,调整麦克风间距,控制各麦克风获取声音的时差;
5、基于远场源二维定位music算法,确定声音的来源方向;
6、麦克风把声信号转换成电信号,经过低通滤波后,经a/d采样,由数字信号处理芯片处理,包括频响补偿、自动增益控制、反馈抑制和减少背景,传导至扬声器;
7、在传输过程中,使用基于阵列旋转不变性的盲波束算法形成自适应波束;
8、对自适应波束进行语音补偿。
9、优选的,所述至少一个麦克风按broadside型进行线性排列如下:
10、麦克风等间距排布成直线,语音声源位于麦克风排列直线一侧,语音声源到麦克风距离超过麦克风间距预设倍数。
11、优选的,所述调整麦克风间距,控制各麦克风获取声音的时差包括如下步骤:
12、获取首个麦克风的声信号y0(t),各麦克风收集到的声信号为首个麦克风收集到的声信号的延迟;
13、根据时差公式,计算第i个麦克风的声信号yi-1(t);
14、使用向量综合表示各麦克风收集到的综合声信号y(t),y(t)=[y0(t),y0(t),...ym-1(t)]t,其中m为麦克风的个数,t为对向量作转置处理;
15、调整麦克风的间距,改变声信号到各麦克风的时差;
16、时差公式如下:
17、yi(t)=y0(t-τ0i),
18、
19、其中,c为声波的传播速度,τ0i为第i+1个麦克风与首个麦克风的时差,δ为声信号与麦克风排列所在直线的垂线的夹角,i为下标,d为相邻所述麦克风的间距。
20、优选的,所述基于远场源二维定位music算法,确定声音的来源方向包括以下步骤:
21、在xyz三维坐标系中,对d个远场信号源的声信号和m个麦克风进行建模,得到麦克风的位置矢量分别为p1,p2,...pm,远场信号源的声信号的位置矢量分别为s1,s2,...sd;
22、对si使用极坐标进行表示,其中,ri为第i个声信号到坐标原点的距离,θi为第i个声信号与z轴的夹角,为第i个声信号在xoy平面的投影与x轴的夹角;
23、计算得出第i个麦克风接收到第j个声信号的相对时间延迟因子αij,
24、αij=(||sj-pi||-||sj||)/c,
25、其中,||sj-pi||和||sj||表示矢量的范数,c为声波的传播速度;
26、将麦克风阵列接收的声信号在频域上表示,得到:
27、
28、其中,fij(ω,t)为第i个麦克风接收到来自第j个信号源的声信号,ni(ω,t)为第i个麦克风上接收到的噪声,e为自然常数,f(ω,t)是宽带二维信号;
29、对宽带二维信号作划分子带和分帧处理,将ω划分为l个子带,得到(ω1,ωk,…ωl);
30、对麦克风阵列接收的声信号在频域上的表示,进行短时傅里叶变换,得到:
31、
32、其中,为的变换结果,s(ωk)为的变换结果,n(ωk)为的变换结果;
33、计算得出f(ωk)的相关矩阵r(ωk),
34、r(ωk)=e{f(ωk)fh(ωk)},
35、其中,e为数学期望符号,h为对矩阵作共轭转置处理;
36、对相关矩阵进行特征分解并排序得:
37、r(ωk)=udiag[γ1,γ2,…γm]uh,
38、其中,γ1,γ2,…γm是r(ωk)的特征值,diag为对角矩阵函数,u是由对应的特征向量组成的特征矩阵,且γ1>γ2>…>γm;
39、计算得出第k个子带的空间谱其中,a为的前k行组成的矩阵,h为对矩阵作共轭转置处理,un为γ1,γ2,…γk对应的特征向量组成的特征矩阵,||ahun||为矩阵的范数;
40、搜索空间谱得到由第k子带估计出的信息源位置信息为取最大值时对应的数值,其中,为信息源位置与z轴的夹角,为信息源位置信息在xoy平面的投影与x轴的夹角。
41、优选的,所述使用基于阵列旋转不变性的盲波束算法形成自适应波束包括以下步骤:
42、获取阵列频域传输方程:
43、x(f,p)=a(f)s(f,p)+n(f,p),
44、其中,x(f,p)为第p帧的阵列接受数据,s(f,p)为第p帧数据在频点f处的分量,n(f,p)为噪声数据在频率f处的分量,a(f)为在频率f处的阵列传输矩阵;
45、对第p帧的阵列接受数据逐帧进行傅单叶变换,得到各个频点的频域值矩阵x(fi);
46、对频域值矩阵进行奇异值分解,得到
47、x(fi)=u(fi)∑(fi)vh(fi)≈u*(fi)∑(fi)vh(fi)≈a(fi)s(fi),
48、其中,fi为奇异值,u*(fi)为u(fi)生成的斜对称矩阵,u(fi)和v(fi)为x(fi)的左、右奇异矩阵,h为对矩阵作共轭转置处理,∑(fi)中的奇异值按降序排列,s(fi)=(s(fi,1),s(fi,2),…s(fi,k));
49、计算得出可逆矩阵t(fi),满足于:u*(fi)=a(fi)t(fi);
50、构造权矩阵w(fi)=t(fi)q(fi),q(fi)为u*(fi)的共轭转置矩阵;
51、将权矩阵与频域值矩阵相乘的结果汇总,作为调整后的自适应波束。
52、优选的,所述对自适应波束进行语音补偿包括以下步骤:
53、使用八通道响度补偿方案进行语音补偿;
54、输入信号x(n),经过分析滤波器组h0(z),h1(z),…h7(z)分解成带通信号并进行下采样;
55、抽取因子为s0,s1,…s7,在不同的通道内实现响度补偿;
56、补偿后的信号进行上采样并经综合滤波器组g0(z),g1(z),…g7(z)综合,得到y(n),y(n)为最后综合得到的重建信号。
57、应用于助听器的语音音频处理系统,用于实现上述的应用于助听器的语音音频处理方法,包括:
58、间距调整模块,所述间距调整模块调整麦克风间距,控制各麦克风获取声音的时差;
59、声源确定模块,所述声源确定模块基于远场源二维定位music算法,确定声音的来源方向;
60、声电转换模块,所述声电转换模块控制麦克风把声信号转换成电信号,经处理后,传导至扬声器;
61、波束适应模块,所述波束适应模块使用基于阵列旋转不变性的盲波束算法形成自适应波束;
62、语音补偿模块,所述语音补偿模块对自适应波束进行语音补偿。
63、与现有技术相比,本发明的有益效果在于:
64、通过设置间距调整模块、声源确定模块、波束适应模块和语音补偿模块,能对声源的方向进行确定,进而根据实际环境中声源和噪声源不断变化的位置,对波束进行自适应调整,同时,能精准调整用于获取声信号的麦克风阵列的间距,进而保证多麦克风收集的声信号的时差间距满足预设需求,合并得到的声信号不会出现紊乱,此外,使用八通道响度补偿方案对语音进行补偿,能得到保真度高的声音,从而能保证助听器的使用效果。
- 还没有人留言评论。精彩留言会获得点赞!