一种UWB与视频联动多目标跟踪方法
本发明涉及视频目标跟踪,尤其涉及一种uwb与视频联动多目标跟踪方法。
背景技术:
1、针对变电站、物流仓库等重要生产区域内多目标跟踪,现有方式主流有三种,第一种是仅通过uwb定位进行跟踪,该方式只能记录目标移动的轨迹点,无法获取目标的实时现场情况;第二种仅通过视频图像目标检测技术,在视频连续多帧图像中对目标特征进行提取与帧间特征匹配跟踪,但当目标距离摄像机较远使得目标在图像中较小或者目标与摄像机之间存在遮挡时,会导致跟踪目标容易丢失,跟踪效果不稳定,且各摄像机视角固定,目标出现跨摄像机视域时,再次识别跟踪该目标效果差。第三种将uwb定位与摄像机结合,可以实现uwb定位不丢失且实时视频画面可获取,但现有方法未充分利用ptz摄像机的可动性,将所有摄像机视角固定,由于监控覆盖范围有限,无法实现全域跟踪监控,并且存在目标近距离相机查找速度慢,跟踪效果差等问题。因此本文将视频监控和uwb定位结合,利用ptz摄像机的全方位监控可动性,并结合geohash位置编码方法,在区域内为每一个移动目标快速查找分配距离最近摄像机进行跟踪,并根据目标和摄像机之间的相对位置与距离,控制摄像机动态跟踪,使得目标始终保持在视频画面中央,实现多个目标全区域实时跟踪不丢失,有助于安全生产监控及事后事故原因溯源。
2、因此,如何提供一种uwb与视频联动多目标跟踪方法,实现对各类安全生产场景的多目标跟踪具有通用性,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种uwb与视频联动多目标跟踪方法,有助于解决现有技术中存在的问题。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种uwb与视频联动多目标跟踪方法,包括以下步骤:
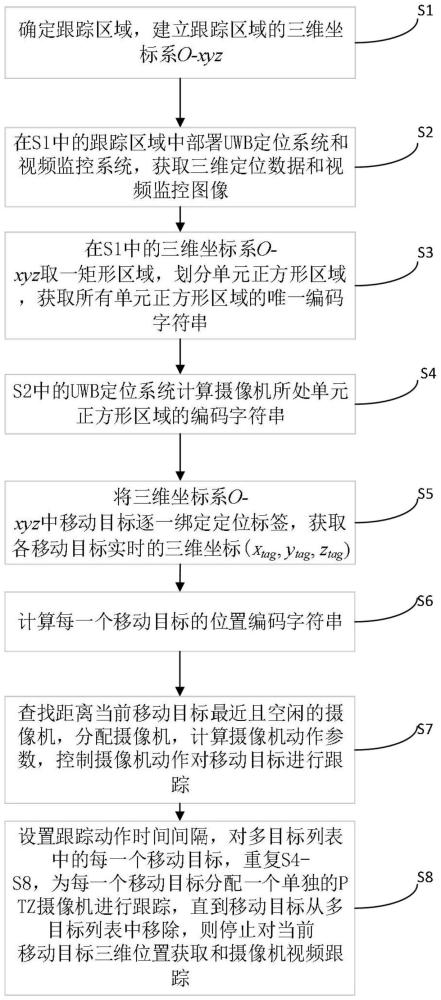
4、s1、确定跟踪区域,建立跟踪区域的三维坐标系o-xyz;
5、s2、在s1中的跟踪区域中部署uwb定位系统和视频监控系统,获取三维定位数据和视频监控图像;
6、s3、在s1中的三维坐标系o-xyz取一矩形区域,划分单元正方形区域,获取所有单元正方形区域的唯一编码字符串;
7、s4、s2中的uwb定位系统计算摄像机所处单元正方形区域的编码字符串;
8、s5、将三维坐标系o-xyz中移动目标逐一绑定定位标签,获取各移动目标实时的三维坐标(xtag,ytag,ztag);
9、s6、计算每一个移动目标的位置编码字符串;
10、s7、查找距离当前移动目标最近且空闲的摄像机,分配摄像机,计算摄像机动作参数,控制摄像机动作对移动目标进行跟踪;
11、s8、设置跟踪动作时间间隔,对多目标列表中的每一个移动目标,重复s4-s8,为每一个移动目标分配一个单独的ptz摄像机进行跟踪,直到移动目标从多目标列表中移除,则停止对当前移动目标三维位置获取和摄像机视频跟踪。
12、上述的方法,可选的,s1中跟踪区域为目标移动区域、uwb定位系统覆盖区域和视频监控覆盖区域的重合区域。
13、上述的方法,可选的,s2中uwb定位系统包括若干uwb基站和若干定位标签,定位标签和基站之间无线通信,用于得到基站覆盖的空间区域内定位标签的三维实时坐标;视频监控系统包括若干ptz摄像机,通过云台左右转动参数、云台俯仰转动参数、摄像机变焦参数控制摄像机全方位动作。
14、上述的方法,可选的,s3中取占地区域为(x,y)的矩形区域,按照长边补全为占地区域为(x,x)的正方形区域,分别对x、x进行n次递归二等分,划分出n2个相同大小的单元正方形区域,直到单元正方形区域边长小于1米,对所有单元正方形区域进行geohash位置编码,获取所有单元正方形区域的唯一编码字符串。
15、上述的方法,可选的,geohash位置编码包括以下步骤:
16、1)、对单元正方形区域进行区间二分,计算x坐标和y坐标的二进制编码bin1、bin2,得到长度相同的两个二进制编码;
17、2)、将x坐标和y坐标的编码交叉组合,得到新的二进制编码bin3,编码长度为单个x坐标编码或y坐标编码的2倍;
18、3)、对bin3,从第0位开始,按照每5位划分为一组,每组转成十进制数值,最后不足5位的,用二进制0补全;
19、4)、对每一个十进制数值,查找对应的base32编码字符并按照顺序拼接一起,得到geohash位置编码字符串。
20、上述的方法,可选的,s5中,uwb定位系统逐一预采集ptz摄像机的三维坐标(xcam,ycam,zcam),将摄像机的(xcam,ycam)坐标转换成geohash位置编码,得到摄像机所处单元正方形区域的编码字符串;多目标列表中,待跟踪目标数量和ptz摄像机数量关系:若待跟踪目标数量≤ptz摄像机数量,则为每一个目标分配一个ptz摄像机进行跟踪;若待跟踪目标数量>ptz摄像机数量,则按照多目标列表中目标排列顺序,从第一个目标开始逐一分配ptz摄像机跟踪,超过摄像机数量的目标,则不进行分配跟踪。
21、上述的方法,可选的,s5中,以定位标签id生成待跟踪的多目标列表,初始化所有移动目标的三维坐标和ptz摄像机参数,通过uwb定位系统获取各移动目标实时的三维坐标(xtag,ytag,ztag);初始化所有移动目标位置定位和摄像机参数,将所有移动目标初始三维坐标设置为(xtag,ytag,ztag)=(-1,0,0),单位为米,ptz摄像机参数设置为(p,t,z)=(0,0,16)。
22、上述的方法,可选的,s6中,根据移动目标一段时间内的三维坐标,计算移动目标距离变化,若目标移动距离超过设定阈值,则对当前时刻的水平坐标进行geohash位置编码,得到每一个移动目标的位置编码字符串;计算移动距离变化:
23、
24、其中,dchange为移动距离,(xtag1,ytag1,ztag1)为移动目标上一时刻的三维坐标,(xtag2,ytag2,ztag2)为移动目标当前时刻的三维坐标;当dchange大于设定阈值时,开始对移动目标进行跟踪,使得移动目标处在视频监控画面中央。
25、上述的方法,可选的,s7中,根据分配的ptz摄像机预采集的三维坐标和移动目标的三维坐标,计算ptz摄像机对移动目标进行跟踪的(p,t,z)动作参数。
26、经由上述的技术方案可知,与现有技术相比,本发明提供了一种uwb与视频联动多目标跟踪方法,具有以下有益效果:本发明方法跟踪效果好,结合uwb定位和视频监控的优点,对各类安全生产场景的多目标跟踪具有通用性;本发明方法在距离目标最近摄像机查找分配方面,利用geohash位置编码字符串进行初步筛选,减少了摄像机遍历过程,尤其对于大区域范围部署大量摄像机的查找分配过程,有效提高了查找速度,减少跟踪响应时间;本发明方法可以实现跟踪区域全域覆盖,有效解决了目标在图像中远小难以检测问题、目标被遮挡或目标跨摄像机视域导致跟踪丢失问题,跟踪效果稳定;本发明方法实现了多目标动态跟踪,为每一个移动目标分配ptz摄像机进行实时跟踪,并保证移动目标一直处在视频画面中央,且不受光照等环境因素影响,具有较强的抗干扰能力和鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!