一种基于自组网的地质灾害监测装置、方法、设备及介质与流程
本发明涉及地质灾害监测,具体涉及一种基于自组网的地质灾害监测装置、方法、设备及介质。
背景技术:
1、北斗变形监测需要在监测物附近稳定区域建设基准站,在监测物上建设若干北斗监测站,通过4g网络将北斗数据发送到远程服务器进行数据解算;也有部分监测技术通过在接收机上内置wifi或lora通讯模块,在项目现场完成基准站和监测站的数据交换,并完成解算,仅将解算结果发送到服务器。
2、现有解算技术通常需要建设基准站,基准站稳定与否直接关系到监测结果的准确性,然而在地灾监测项目中,现场环境恶劣,由于基准站选址不合理,经常发生基准站数据质量差、基准站位移的情况,严重影响监测结果的准确性;项目现场的设备安装及数据传输配置复杂,需要专业技术人员操作;在阴雨天气,接收机经常因为电力不足而发生离线现象,而阴雨天气又是地质灾害频发的时间,因此安全性得不到保障。
3、综上所述,急需一种基于自组网的地质灾害监测装置、方法、设备及介质解决现有技术中的问题。
技术实现思路
1、为了解决上述问题,本发明的目的在于提供一种基于自组网的地质灾害监测装置、方法、设备及介质,具体技术方案如下:
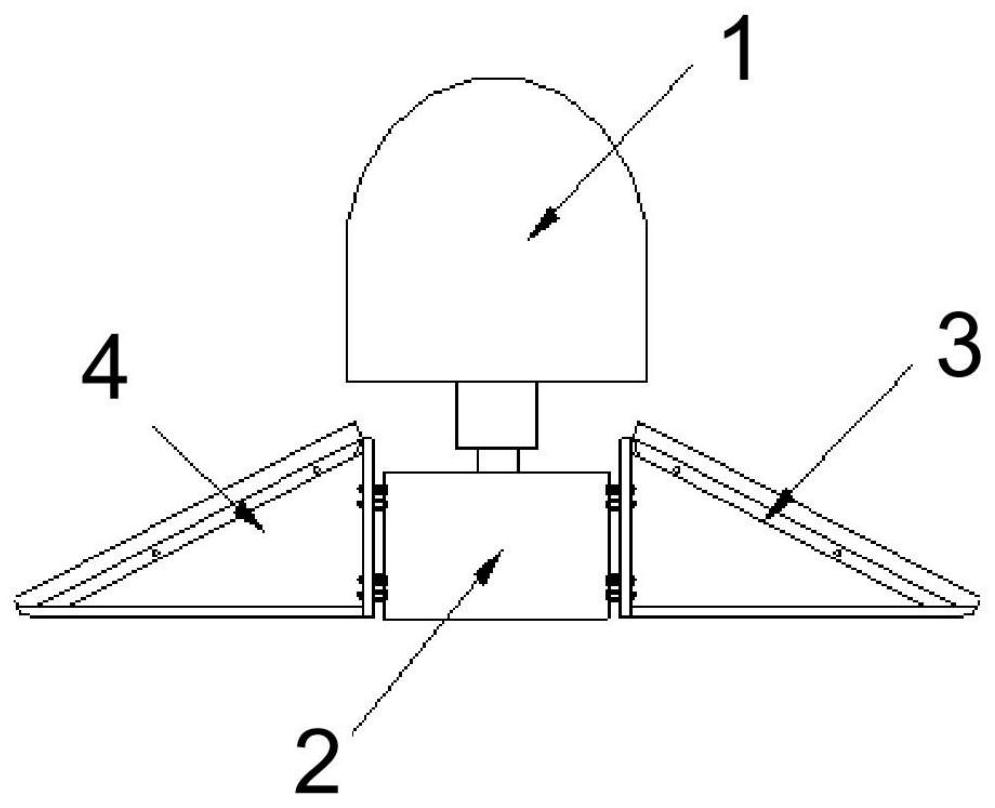
2、一种基于自组网的地质灾害监测装置,包括北斗接收机、光伏充电模块和底座,所述北斗接收机和光伏充电模块均设置在底座上,所述光伏充电模块连接所述北斗接收机;
3、所述北斗接收机包括监测站和数据处理站,所述监测站包括第一电源、第一加速度计、第一北斗数据采集模块、微控制单元和第一lora模块,所述第一电源连接所述微控制单元,所述微控制单元分别连接所述第一北斗数据采集模块、第一加速度计和第一lora模块;
4、所述数据处理站包括第二电源、第二加速度计、第二北斗数据采集模块、数据处理模块、第二lora模块和4g模块,所述第二电源连接所述数据处理模块,所述数据处理模块分别连接所述4g模块、第二北斗数据采集模块、第二加速度计和第二lora模块,所述数据处理模块用于处理数据和控制北斗接收机;
5、所述第一北斗数据采集模块或者第二北斗数据采集模块用于采集原始北斗数据。
6、另外,本发明还公开了一种基于自组网的地质灾害监测方法,应用如上所述的地质灾害监测装置,所述方法包括以下步骤:
7、s1:安装地质灾害监测装置,具体是,在监测区域选定站点,将监测站和数据处理站根据站点安装在监测区域内,并对监测站和数据处理站分配唯一的设备id;
8、s2:坐标初始化,具体是,基于北斗数据和加速度计数据计算每个北斗监测站的初始坐标,并计算所有监测站的加速度计数据中误差;通过第一lora模块将北斗数据和加速度计数据中误差发送至第二lora模块;
9、s3:确定基准站,具体是,所述数据处理站接收到数据后,选择加速度计数据中误差最小的监测站作为基准站;
10、s4:基线解算,具体是,所述数据处理站利用基准站对剩余监测站进行基线解算;
11、s5:数据平差,具体是,对基线解算后的结果进行平差,得到平差结果;
12、s6:基准站位移判断,具体是,根据平差结果判断基准站是否发生位移,发生位移则进入s7,未发生位移则进入s9;
13、s7:监测站解算,具体是,根据s5中的平差结果计算各个监测站的位移量,将位移量发送到远程服务器。
14、s8:更换基准站,具体是,当基准站发生位移时,根据各监测站传输回的位移标志,选择无位移的监测站作为基准站,若存在多个无位移监测站,则在无位移的监测站中选择加速度计中误差最小的监测站作为基准站,并回到s4;
15、s9:监测站采集数据,具体是,唤醒所述第一北斗数据采集模块,并向数据处理站发送唤醒信号,唤醒所有监测站,进行数据解算;
16、s10:实施地质灾害监测,具体是,所述第一北斗数据采集模块采集北斗原始数据,通过第一lora模块向数据处理站传输北斗原始数据以及加速度计数据,判定监测站是否位移,根据加速度计数据计算位移量中误差,完成对监测区域的地质灾害监测。
17、优选的,在s4中,所述基线解算采用载波相位差分算法,得到基准站和监测站之间的基线向量。
18、优选的,在s5中,对基线解算后的结果进行平差,具体如下:
19、调用平差观测方程,代入基准站和监测站之间的基线向量,得到所有监测站的观测值残差,根据最小二乘平差原理改正监测站的坐标,完成平差。
20、优选的,在s6中,基准站是否发生位移的判断方式包括平均间隙法判定、加速度计阈值判定和精密单点定位判定,上述3种判定方式中有一种方式判定基准站发生位移,则认为基准站发生位移;
21、平均间隙法判定:当存在h小时的前期平差结果时,根据当期平差结果和前期平差结果利用平均间隙法判断基准站是否平稳;
22、加速度计阈值判定:若不存在前期平差结果,则根据基准站的加速度计结果是否超过阈值判断基准站是否位移;
23、精密单点定位判定:按照一定周期对基准站的数据进行精密单点定位解算,当解算结果超过阈值时,判定基准站发生位移。
24、优选的,在s9中,所述第一北斗数据采集模块的控制方式包括加速度计控制、数据处理站信号控制和接收机多模式休眠控制,当控制方式冲突时,执行控制强度更高的控制方式,控制强度从强到弱依次为加速度计控制、数据处理站信号控制和接收机多模式休眠控制,其中:
25、加速度计控制:监测站加速度计模块长期运行,实时判断加速度计数值是否超过预设的阈值,若超过阈值则唤醒第一北斗数据采集模块;
26、数据处理站信号控制:监测站接收控制信号,控制第一北斗数据采集模块唤醒;
27、接收机多模式休眠控制:监测站根据定时器时间判断是否数据采集时段,对第一北斗数据采集模块执行唤醒或者休眠控制。
28、优选的,在s9中,数据处理站信号控制具体是:
29、监测站接收来自数据处理站的控制信号,根据控制信号控制第一北斗数据采集模块休眠或提高采集频率。
30、优选的,在s9中,所述控制信号还用于升级固件或者调整参数。
31、另外,本发明还公开了一种计算机设备,包括存储器和处理器;
32、所述存储器用于存储可在处理器上运行的计算机程序;
33、所述处理器用于执行所述计算机程序时实现如上所述的地质灾害监测方法的步骤。
34、另外,本发明还公开了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的地质灾害监测方法的步骤。
35、应用本发明的技术方案,具有以下有益效果:
36、(1)本发明中的地质灾害监测装置采用lora模块构建北斗接收机的自组网,并设有光伏充电模块实现太阳能供电。
37、(2)本发明中的地质灾害监测方法自动判断基准站状态,在基准站发生位移时更换基准站,相比于现有的地质灾害监测,本发明方法不需要选择基准点,降低专业性要求,避免传统方法中因为基准站位移造成的监测数据异常。另外,本发明方法将加速度计和gnss设备进行融合,提高监测的可靠性。
38、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
- 还没有人留言评论。精彩留言会获得点赞!