一种驱离和保护水生动物的声学装置及方法
本发明属于声学驱离和保护,具体涉及一种驱离和保护水生动物的声学装置及方法。
背景技术:
1、随着人们长江资源开发和利用强度的不断增加,涉及长江江豚等水生动物分布及活动水域工程建设导致长江江豚等水生动物被误伤事件时有发生。另外工程建设及其产生的水下噪声也对长江江豚种群的生存造成了巨大的威胁。如何在港口、航道、施工水域对江豚进行驱离和保护,避免对长江江豚造成伤害,实施有效保护成为了研究热点。
2、长江江豚等豚鲸类水生动物是利用声导航的水生生物,具有非常敏锐的听力系统,对声音信号也十分敏感。因此通过在指定水域产生江豚敏感的声音,会迫使江豚离开特定水域(如工程建设区),避免施工对江豚造成的伤害,从而达到驱离保护江豚的目的。为了保护豚鲸类水生动物,申请公开号为cn 109392890 a的中国发明专利《一种施工水域长江江豚声驱赶保护装置及方法》、申请公开号为cn 108007560a的中国发明专利《一种基于中高频信号的海豚声学保护装置及其保护方法》,给出了基于中高频信号的海豚声学保护装置及保护方法,针对渔业捕捞过程宽吻海豚,中华白海豚驱离保护起作用,对其他豚类的驱赶效果未有明确结论。申请公开号为cn 113678797a的中国发明专利《一种渔业作业海域宽频声信号海豚声学驱离方法及其系统》给出了一种渔业作业海域宽频信号海豚驱离方法及其系统,能够发出更宽带的声信号,具有宽频带,适用保护的豚类范围更广。在实际应用中,这些装置和方法向水下360°全方位发射声信号,驱赶指定方向的豚鲸类的同时,也将其他方向的鱼类等一起驱离,从而影响了其他水生物的正常生活,同时也造成了水下噪声更大的污染。
技术实现思路
1、本发明的目的在于克服现有技术向水下360°全方位发射声信号,驱赶指定方向的豚鲸类的同时,也将其他方向的鱼类等一起驱离,从而影响了其他水生物的正常生活,同时也造成了水下噪声更大污染的缺陷。
2、为了实现上述目的,本发明提出了一种驱离和保护水生动物的声学装置,所述装置包括:
3、多基元换能器阵,由n个全指向性基元组成,沿轴向方向均匀分布在圆环阵上;
4、主控制模块,连接信号驱动模块,用于产生声信号,并对产生的多通道的声信号进行相位调节;
5、信号驱动模块,用于通过功率放大器提升主控制模块产生的声信号的能量,驱动多基元换能器阵;信号驱动模块包括n个驱动电路,每个基元与独立的驱动电路相连;
6、阻抗匹配模块,用于对声功率与多基元换能器阵的阻抗进行匹配,将电功率传送到多基元换能器阵上;阻抗匹配模块包括n个阻抗匹配电路,每个基元与独立的阻抗匹配电路连接;和
7、电源模块,用于为各模块供电;
8、所述主控制模块对产生的多通道的声信号进行相位调节,增强设定方向声能量,使多基元换能器阵向设定覆盖角度发出声波束。
9、作为上述装置的一种改进,所述基元个数n由驱离覆盖最小范围角计算得到:
10、
11、作为上述装置的一种改进,所述主控制模块对产生的多通道的声信号进行相位调节的方法包括:
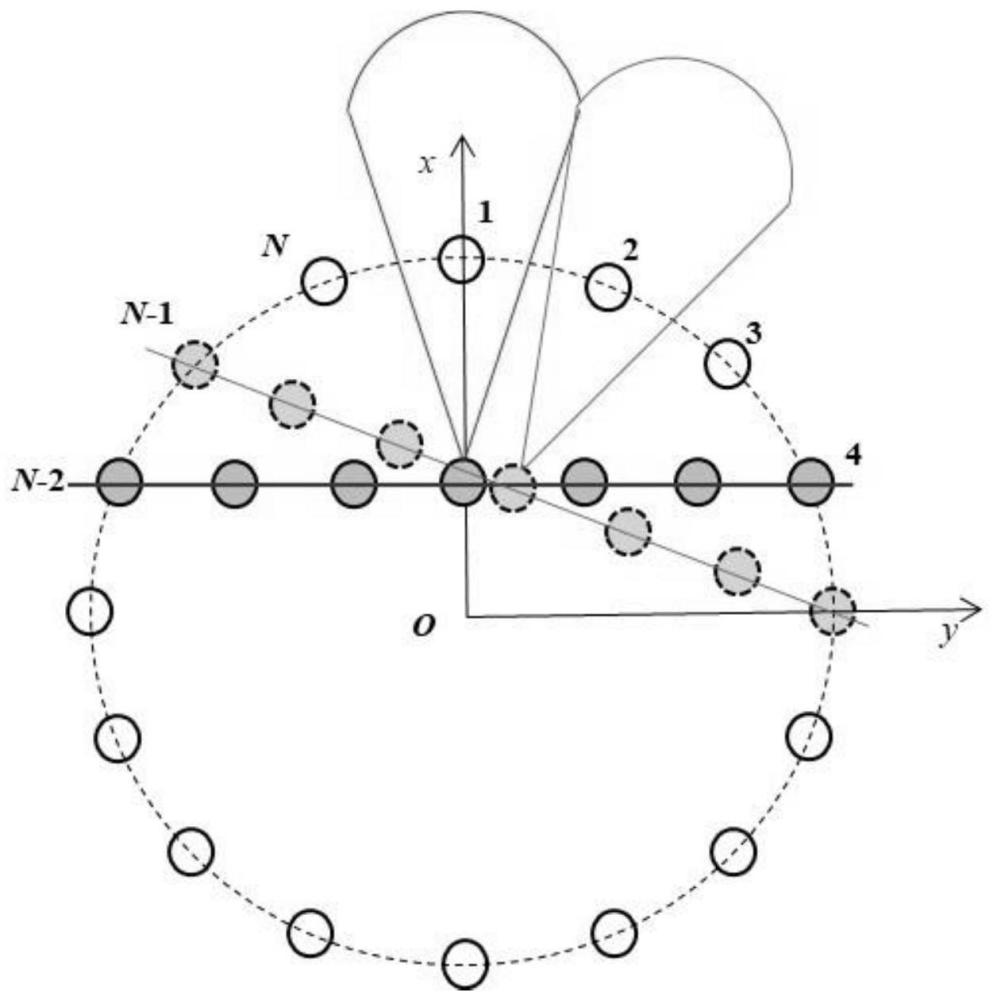
12、将设定调向角θ的圆环阵发射输出信号x经过p变换,得到直线阵输出信号y:y=px;
13、通过解如下方程,计算参数p值:
14、
15、其中,||·||f表示friedlander范数;
16、b=[b(k1),...,b(kn),...,b(km)],表示k×m维虚拟直线阵导向矢量矩阵;k表示虚拟阵列的阵元数;m表示根据设定驱离覆盖范围角ω,即设定覆盖角对应扇区内的离散角度数量:
17、
18、其中,λ为声波波长,d为等效直线阵元间距;
19、其中,b(kn)表示第n个虚拟直线阵目标导向矢量:
20、
21、其中,k<s,k=2π/λ;pni为虚拟直线阵第i阵元在虚拟直线阵中的位置,i=1,2,...,k;t表示矢量转置;s表示虚拟直线阵映射的圆环阵的阵元数量;
22、表示考虑阵元方向性的物理阵列的导向矢量;
23、其中,g表示s×m维矩阵,包含圆环阵每个基元的方向响应;a表示s×m维圆环阵导向矢量矩阵:
24、a=[a(k1),...,a(km),...,a(km)]
25、其中,a(km)表示第m个圆环阵导向矢量:
26、
27、其中,r表示多基元换能器阵的圆环阵半径;τm=2π(m-1/m),m=1,2,...,m。
28、作为上述装置的一种改进,所述装置还包括:
29、通讯模块,用于以通用串口协议与外部进行信息与数据交换,设置装置运行参数。
30、作为上述装置的一种改进,所述装置运行参数包括:工作频率、控制方向、覆盖角度、信号强度、持续时间及时间间隔。
31、作为上述装置的一种改进,所述装置还包括:
32、水密电子舱,采用水密结构防水设计,内部放置主控制模块、信号驱动模块、阻抗匹配模块、电源模块和通讯模块;水密电子舱通过连接件与多基元换能器阵连接,传输控制信号。
33、作为上述装置的一种改进,所述基元的水平方向为全指向性,垂直方向的指向性大于60°,发射声频率覆盖带宽30khz~140khz。
34、本技术还提供一种驱离和保护水生动物的声学方法,基于上述装置实现,所述方法包括:
35、步骤b1:主控制模块根据驱离覆盖角度ω计算覆盖角对应扇区内的离散角度数量m,根据声发射方向的调向角θ,完成发射相位控制,产生发射信号,并将发射能量指向该方向;
36、步骤b2:主控制模块控制n个通道的阵元信号按照调向角θ进行相位调节,形成指向θ,覆盖角度为ω的声波束,增强该方向声能量,并控制信号驱动模块发射声信号;
37、步骤b3:主控制模块调节信号驱动模块的声源信号强度、声信号重复间隔和声音持续时间,使在一定时间范围内发射声波具有随机性,产生间歇性多种声信号的组合。
38、作为上述方法的一种改进,所述步骤b1包括:
39、将设定调向角θ的圆环阵发射输出信号x经过p变换,得到直线阵输出信号y:y=px;
40、通过解如下方程,计算参数p值:
41、
42、其中,||·||f表示friedlander范数;
43、b=[b(k1),...,b(kn),...,b(km)],表示k×m维虚拟直线阵导向矢量矩阵;k表示虚拟阵列的阵元数;m表示根据设定驱离覆盖范围角ω,即设定覆盖角对应扇区内的离散角度数量:
44、
45、其中,λ为声波波长,d为等效直线阵元间距;
46、其中,b(kn)表示第n个虚拟直线阵目标导向矢量:
47、
48、其中,k<s,k=2π/λ;pni为k阵元中第i阵元在虚拟直线阵中的位置,i=1,2,...,k;t表示矢量转置;s表示虚拟直线阵映射的圆环阵的阵元数量;
49、表示考虑阵元方向性的物理阵列的导向矢量;
50、其中,g表示s×m维矩阵,包含圆环阵每个基元的方向响应;a表示s×m维圆环阵导向矢量矩阵:
51、a=[a(k1),...,a(km),...,a(km)]
52、其中,a(km)表示第m个圆环阵导向矢量:
53、
54、其中,r表示多基元换能器阵的圆环阵半径;τm=2π(m-1/m),m=1,2,...,m。
55、与现有技术相比,本发明的优势在于:
56、1、本发明可以根据长江江豚等豚鲸类水生动物回声定位信号和听觉域的基本特征,设定驱离信号参数,避免豚鲸类水生动物对单一信号的适应性,并有针对性的产生高效、灵活和驱离信号。
57、2、本发明能够根据特定场景需求,精准指定驱离方向,从而降低其他方向的声污染,有效避免影响其他水生物的生活。同时,也可以实现豚鲸类水生动物的360°全向驱离和保护。
58、3、本发明的装置和方法具有全天候、不受天气条件影响特点。
- 还没有人留言评论。精彩留言会获得点赞!