MEO卫星非永久星间链路的J2摄动补偿方法及系统与流程
本发明涉及航天,具体地,涉及一种meo卫星非永久星间链路的j2摄动补偿方法及系统。
背景技术:
1、卫星在绕地运行过程中受到包括地球非球形引力摄动、月球引力摄动、大气阻力摄动、太阳辐射压力摄动等多种因素的影响。其中主要的是地球非球形引力摄动的影响,而地球非球形引力摄动对卫星轨道的长期影响主要是地球扁率项j2。由于摄动影响,卫星会逐渐偏离设计轨道,使星座结构被破坏,导致星间不可见,链路中断。
2、现有文献对星座摄动补偿主要针对具有永久星间链路的walker星座,通过轨道参数偏置补偿入轨误差和j2摄动导致的升交点和纬度幅角漂移,或补偿日月光摄动导致的升交点和纬度幅角的漂移,进而保持星座结构稳定。并未基于j2摄动分析的半长轴偏置思路开展等高倾斜圆轨道与0倾角圆轨道之间的摄动补偿设计,使两轨道间的非永久星间链路成为永久星间链路。
3、公开号为cn112769466b的发明专利,公开了一种低轨卫星星座构型保持方法,其中提出高精度轨道预报与轨道参数偏置相结合的摄动补偿法对升交点和纬度幅角进行绝对保持,进而保持低轨walker星座结构稳定,并未涉及非永久星间链路的摄动补偿。
4、公开号为cn110053788b的发明专利,公开了一种考虑复杂摄动的星座长期保持控制频次估计方法,其中提出基于摄动模型计算入轨偏差并通过打靶估计星座控制频次的方法,不涉及星座保持的具体方法,亦不涉及非永久星间链路的摄动补偿。
5、公开号为cn107168372b的发明专利,公开了一种基于在轨参数辨识和偏置的卫星跟飞长期摄动补偿方法,其中提出基于在轨数据分析卫星纬度幅角速率并计算出跟飞星半长轴偏置量的编队控制方法,并未从摄动分析的角度开展跟飞星半长轴偏置量设计,且不涉及星间链路。
6、公开号为cn106628257b的发明专利,公开了一种地球摄动引力场中近地航天器相对运动轨道的保持方法,其中提出地球引力摄动下主从星相对运动轨道的闭环控制策略,未从摄动分析的角度开展轨道参数偏置设计,且不涉及星间链路。
7、公开号为cn107298186b的发明专利,公开了一种基于激光载荷的同轨面卫星自主相对位置保持方法,其中提出基于激光测距的星间相对纬度幅角保持方法,该方法通过改变太阳翼迎风面结合大气阻力实现纬度幅角调整,不涉及非永久星间链路的摄动补偿。
技术实现思路
1、针对现有技术中的缺陷,本发明提供一种meo卫星非永久星间链路的j2摄动补偿方法及系统。
2、根据本发明提供的一种meo卫星非永久星间链路的j2摄动补偿方法及系统,所述方案如下:
3、第一方面,提供了一种meo卫星非永久星间链路的j2摄动补偿方法,所述方法包括:
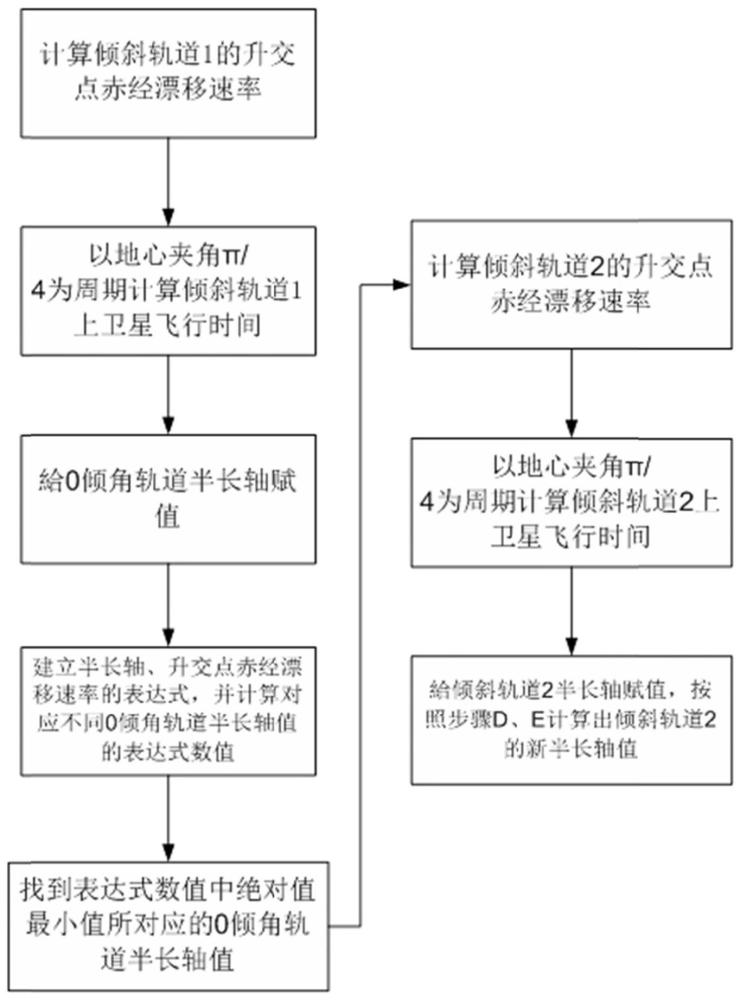
4、步骤s1:根据升交点漂移公式,计算第一倾斜轨道的升交点赤经漂移速率;
5、步骤s2:根据地心夹角计算第一倾斜轨道上卫星飞行时间;
6、步骤s3:给0倾角轨道半长轴赋值;
7、步骤s4:建立0倾角轨道半长轴、升交点赤经漂移速率的表达式,并计算对应不同0倾角轨道半长轴值的表达式数值;
8、步骤s5:找到0倾角轨道半长轴值表达式数值中绝对值最小值所对应的0倾角轨道半长轴值;
9、步骤s6:计算第二倾斜轨道的升交点赤经漂移速率;
10、步骤s7:根据地心夹角计算第二倾斜轨道上卫星飞行时间;
11、步骤s8:给第二倾斜轨道半长轴赋值,并依照步骤s4、s5计算出第二倾斜轨道的新半长轴值。
12、优选地,所述步骤s1中,第一倾斜轨道为圆轨道,半长轴为ai_1,轨道漂移考虑j2摄动,第一升交点赤经漂移速率为:
13、
14、其中,j2为地球引力势的二阶带谐系数,μ为地球引力常数,re为地球半径,i_1为第一倾斜轨道的倾角,ai_1为第一倾斜轨道半长轴。
15、优选地,所述步骤s2包括:以地心夹角π/4为周期计算第一倾斜轨道上卫星飞行时间;
16、第一倾斜轨道卫星飞行π/4地心夹角所用时间表示为:
17、
18、其中,ui_1为第一倾斜轨道纬度幅角速率,
19、
20、其中,i_1为第一倾斜轨道倾角。
21、优选地,所述步骤s3中,0倾角轨道为圆轨道,且0倾角轨道的半长轴大于第一倾斜轨道的半长轴,0倾角轨道的半长轴为:
22、a0∈[ai_1,ai_1+δa0]
23、其中,ai_1为第一倾斜轨道半长轴,δa0为0倾角轨道半长轴偏置量估计值。
24、优选地,所述步骤s4中,关于0倾角轨道半长轴、升交点赤经漂移速率的表达式为:
25、f(a0)=u0-ui+ωmean_0-ωmean_i
26、遍历计算a0∈[ai,ai+δa]时的f(a0)值,u0为0倾角轨道纬度幅角速率,ui为倾斜轨道纬度幅角速率,ai为倾斜轨道半长轴,δa为半长轴偏置量估计值;
27、
28、δωmean_0为0倾角轨道的升交点赤经漂移速率。
29、优选地,所述步骤s6中,第二倾斜轨道为圆轨道,半长轴为ai_2,考虑j2影响时升交点赤经漂移速率为:
30、
31、其中,j2为地球引力势的二阶带谐系数,μ为地球引力常数,re为地球半径,ai_2为第二倾斜轨道半长轴。
32、优选地,所述步骤s7中,第二倾斜轨道卫星飞行π/4地心夹角所用时间表示为:
33、
34、其中,ui_2为第二倾斜轨道纬度幅角速率,
35、
36、其中,i_2为第二倾斜轨道倾角。
37、优选地,所述步骤s8中,第二倾斜轨道为圆轨道,且第二倾斜轨道半长轴小于0倾角圆轨道的半长轴,第二倾斜轨道半长轴为:
38、a′i_2∈[a0-δai_2,a0]
39、其中,δai_2为第二倾斜轨道半长轴偏置量估计值,a0为0倾角轨道的半长轴。
40、第二方面,提供了一种meo卫星非永久星间链路的j2摄动补偿系统,所述系统包括:
41、模块m1:根据升交点漂移公式,计算第一倾斜轨道的升交点赤经漂移速率;
42、模块m2:根据地心夹角计算第一倾斜轨道上卫星飞行时间;
43、模块m3:给0倾角轨道半长轴赋值;
44、模块m4:建立0倾角轨道半长轴、升交点赤经漂移速率的表达式,并计算对应不同0倾角轨道半长轴值的表达式数值;
45、模块m5:找到0倾角轨道半长轴值表达式数值中绝对值最小值所对应的0倾角轨道半长轴值;
46、模块m6:计算第二倾斜轨道的升交点赤经漂移速率;
47、模块m7:根据地心夹角计算第二倾斜轨道上卫星飞行时间;
48、模块m8:给第二倾斜轨道半长轴赋值,并依照模块m4、m5计算出第二倾斜轨道的新半长轴值。
49、优选地,所述模块m1中,第一倾斜轨道为圆轨道,半长轴为ai_1,轨道漂移考虑j2摄动,第一升交点赤经漂移速率为:
50、
51、其中,j2为地球引力势的二阶带谐系数,μ为地球引力常数,re为地球半径,i_1为第一倾斜轨道的倾角,ai_1为第一倾斜轨道半长轴;
52、所述模块m2包括:以地心夹角π/4为周期计算第一倾斜轨道上卫星飞行时间;
53、第一倾斜轨道卫星飞行π/4地心夹角所用时间表示为:
54、
55、其中,ui_1为第一倾斜轨道纬度幅角速率,
56、
57、其中,i_1为第一倾斜轨道倾角;
58、所述模块m3中,0倾角轨道为圆轨道,且0倾角轨道的半长轴大于第一倾斜轨道的半长轴,0倾角轨道的半长轴为:
59、a0∈[ai_1,ai_1+δa0]
60、其中,ai_1为第一倾斜轨道半长轴,δa0为0倾角轨道半长轴偏置量估计值;
61、所述模块m4中,关于0倾角轨道半长轴、升交点赤经漂移速率的表达式为:
62、f(a0)=u0-ui+ωmean_0-ωmean_i
63、遍历计算a0∈[ai,ai+δa]时的f(a0)值,u0为0倾角轨道纬度幅角速率,ui为倾斜轨道纬度幅角速率,ai为倾斜轨道半长轴,δa为半长轴偏置量估计值;
64、
65、δωmean_0为0倾角轨道的升交点赤经漂移速率;
66、所述模块m6中,第二倾斜轨道为圆轨道,半长轴为ai_2,考虑j2影响时升交点赤经漂移速率为:
67、
68、其中,j2为地球引力势的二阶带谐系数,μ为地球引力常数,re为地球半径,ai_2为第二倾斜轨道半长轴;
69、所述模块m7中,第二倾斜轨道卫星飞行π/4地心夹角所用时间表示为:
70、
71、其中,ui_2为第二倾斜轨道纬度幅角速率,
72、
73、其中,i_2为第二倾斜轨道倾角;
74、所述模块m8中,第二倾斜轨道为圆轨道,且第二倾斜轨道半长轴小于0倾角圆轨道的半长轴,第二倾斜轨道半长轴为:
75、a′i_2∈[a0-δai_2,a0]
76、其中,δai_2为第二倾斜轨道半长轴偏置量估计值,a0为0倾角轨道的半长轴。
77、与现有技术相比,本发明具有如下的有益效果:
78、本发明使倾斜圆轨道与0倾角圆轨道、倾斜圆轨道之间的非永久星间链路成为了永久星间链路,便于星间持续稳定通信。
79、本发明的其他有益效果,将在具体实施方式中通过具体技术特征和技术方案的介绍来阐述,本领域技术人员通过这些技术特征和技术方案的介绍,应能理解所述技术特征和技术方案带来的有益技术效果。
- 还没有人留言评论。精彩留言会获得点赞!