矿山掘进设备的物料转载控制方法、系统以及存储介质与流程
本发明涉及矿山掘进设备,尤其涉及一种矿山掘进设备的物料转载控制方法、系统、存储介质以及计算机程序产品。
背景技术:
1、随着矿山装备制造厂家自主研发能力的提升,矿山掘进设备的掘进机的掘进效率不断提升;矿山掘进设备的后配套运输设备有多种,例如,后配套运输设备包括梭车、锚运破转载机、自移式皮带机等不同工况下的标配设备,后配套运输设备用于对掘进机产生的料渣进行物料转载。掘进机的运输系统可以通过链条或皮带传输等传输方式,将掘进机作业产生的料渣输送至掘进机机尾,并在掘进机机尾将料渣输送到后配套运输设备中。掘进机机尾的物料输送位置和后配套运输设备的接料处的相对位置决定了料渣能否顺利运输出掘进工作面;由于后配套运输设备的种类不同,掘进机机尾的物料输送位置需要根据后配套运输设备的安装位置进行调整,并且,在矿山掘进设备转弯时,出现掘进机与后配套运输设备不在同一水平线的情况,目前,在矿山掘进设备的工作过程中,经常出现掉料及料渣堆积、加大现场人员工作量并影响掘进效率等问题。
技术实现思路
1、有鉴于此,本发明要解决的一个技术问题是提供一种矿山掘进设备的物料转载控制方法、系统、存储介质以及计算机程序产品。
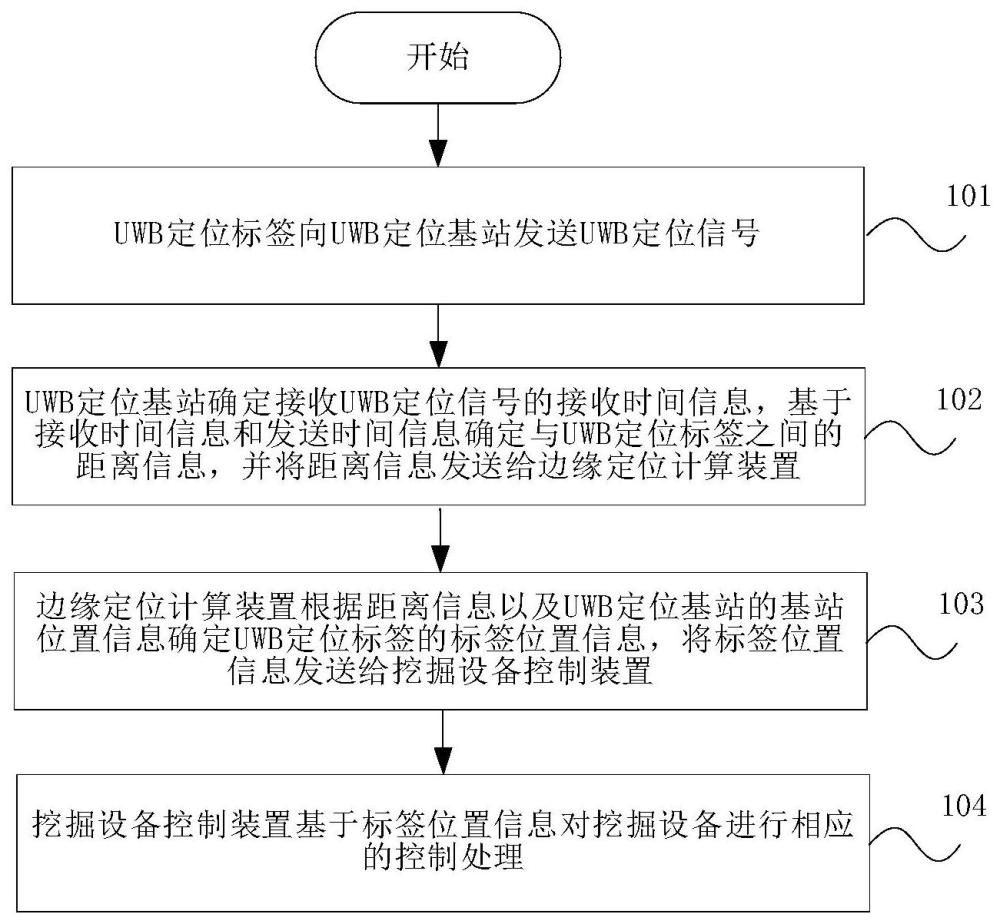
2、根据本公开的第一方面,提供一种矿山掘进设备的物料转载控制方法,包括:uwb定位标签向uwb定位基站发送uwb定位信号;其中,所述uwb定位标签安装在矿山掘进设备的物料转载检测位置,所述uwb定位信号包括:发送时间信息;所述uwb定位基站确定接收所述uwb定位信号的接收时间信息,基于所述接收时间信息和所述发送时间信息确定与所述uwb定位标签之间的距离信息,并将所述距离信息发送给边缘定位计算装置;所述边缘定位计算装置根据所述距离信息以及所述uwb定位基站的基站位置信息确定所述uwb定位标签的标签位置信息,将所述标签位置信息发送给调整控制系统;所述调整控制系统基于所述标签位置信息对所述矿山掘进设备进行相应的控制处理。
3、可选的,所述矿山掘进设备包括:掘进机和后配套运输设备;所述物料转载检测位置包括:所述掘进机的尾部;或者,所述物料转载检测位置包括:所述掘进机的尾部和所述后配套运输设备的接料处。
4、可选的,在所述物料转载检测位置为所述掘进机的尾部的情况下,所述uwb定位标签安装在所述掘进机的尾部,所述标签位置信息包括:所述掘进机的尾部位置信息;所述调整控制系统基于所述标签位置信息对所述矿山掘进设备进行相应的控制处理包括:所述调整控制系统基于所述掘进机的尾部位置信息,对所述掘进机的尾部进行升降和/或摆动控制处理。
5、可选的,在所述物料转载检测位置为所述掘进机的尾部和所述后配套运输设备的接料处的情况下,所述掘进机的尾部和所述后配套运输设备的接料处分别安装有所述uwb定位标签,所述标签位置信息包括:所述掘进机的尾部位置信息和所述后配套运输设备的接料处位置信息;所述调整控制系统基于所述标签位置信息对所述矿山掘进设备进行相应的控制处理包括:所述调整控制系统基于所述掘进机的尾部位置信息和所述后配套运输设备的接料处位置信息,对所述掘进机的尾部和所述后配套运输设备的接料处进行升降和/或摆动控制处理。
6、可选的,所述对所述掘进机的尾部和所述后配套运输设备的接料处进行升降和摆动控制处理包括:所述调整控制系统基于所述掘进机的尾部位置信息和所述后配套运输设备的接料处位置信息确定调整目标位置信息;所述调整控制系统基于所述调整目标位置信息对所述掘进机的尾部和所述后配套运输设备的接料处进行升降和/或摆动控制处理。
7、可选的,所述边缘定位计算装置根据所述距离信息以及所述uwb定位基站的基站位置信息确定所述uwb定位标签的标签位置信息包括:所述边缘定位计算装置在所述掘进机的运输系统启动前,将所述距离信息与预设的距离阈值进行比对处理;所述边缘定位计算装置基于比对结果对所述距离信息进行数据清洗处理;所述边缘定位计算装置基于进行了数据清洗处理后的距离信息以及所述基站位置信息确定所述标签位置信息并存储在数据库中。
8、可选的,所述边缘定位计算装置在所述掘进机的运输系统启动后,将所述距离信息与所述距离阈值进行比对处理,基于比对结果对所述距离信息进行数据清洗处理;所述边缘定位计算装置基于进行了数据清洗处理后的距离信息以及所述基站位置信息确定所述标签位置信息,作为观测值;所述边缘定位计算装置获取所述数据库中存储的标签位置信息,作为先验值;所述边缘定位计算装置计算所述观测值和所述先验值之间的偏差,作为估计偏差;所述边缘定位计算装置基于所述估计偏差与最优估计偏差的对比结果,确定所述标签位置信息以及所述最优估计偏差,并存储在数据库中。
9、可选的,所述边缘定位计算装置根据所述距离信息以及所述uwb定位基站的基站位置信息确定所述uwb定位标签的标签位置信息包括:所述边缘定位计算装置根据两个uwb定位基站与所述uwb定位标签的距离信息以及所述两个uwb定位基站的基站位置信息,确定所述标签位置信息;其中,所述标签位置信息包括:二维坐标信息。
10、可选的,所述边缘定位计算装置根据所述距离信息以及所述uwb定位基站的基站位置信息确定所述uwb定位标签的标签位置信息包括:所述边缘定位计算装置,用于根据四个uwb定位基站与所述uwb定位标签的距离信息以及所述四个uwb定位基站的基站位置信息,确定所述标签位置信息;其中,所述标签位置信息包括:三维坐标信息。
11、可选的,人机交互系统接收所述边缘定位计算装置发送的所述标签位置信息,并对所述标签位置信息进行显示处理。
12、根据本公开的第二方面,提供一种矿山掘进设备的物料转载控制系统,包括:uwb定位标签、uwb定位基站、边缘定位计算装置和调整控制系统;所述uwb定位标签安装在矿山掘进设备的物料转载检测位置,用于向所述uwb定位基站发送uwb定位信号;其中,所述uwb定位信号包括:发送时间信息;所述uwb定位基站,用于确定接收所述uwb定位信号的接收时间信息,基于所述接收时间信息和所述发送时间信息确定与所述uwb定位标签之间的距离信息,并将所述距离信息发送给所述边缘定位计算装置;所述边缘定位计算装置,用于根据所述距离信息以及所述uwb定位基站的基站位置信息确定所述uwb定位标签的标签位置信息,将所述标签位置信息发送给所述调整控制系统;所述调整控制系统,用于基于所述标签位置信息对所述矿山掘进设备进行相应的控制处理。
13、可选的,所述矿山掘进设备包括:掘进机和后配套运输设备;所述物料转载检测位置包括:所述掘进机的尾部;或者,所述物料转载检测位置包括:所述掘进机的尾部和所述后配套运输设备的接料处。
14、可选的,在所述物料转载检测位置为所述掘进机的尾部的情况下,所述uwb定位标签安装在所述掘进机的尾部;所述标签位置信息包括:所述掘进机的尾部位置信息;所述调整控制系统,用于基于所述掘进机的尾部位置信息,对所述掘进机的尾部进行升降和/或摆动控制处理。
15、可选的,在所述物料转载检测位置为所述掘进机的尾部和所述后配套运输设备的接料处的情况下,所述掘进机的尾部和所述后配套运输设备的接料处分别安装有所述uwb定位标签;所述标签位置信息包括:所述掘进机的尾部位置信息和所述后配套运输设备的接料处位置信息;所述调整控制系统,用于基于所述掘进机的尾部位置信息和所述后配套运输设备的接料处位置信息,对所述掘进机的尾部和所述后配套运输设备的接料处进行升降和/或摆动控制处理。
16、可选的,所述调整控制系统,用于基于所述掘进机的尾部位置信息和所述后配套运输设备的接料处位置信息确定调整目标位置信息,基于所述调整目标位置信息对所述掘进机的尾部和所述后配套运输设备的接料处进行升降和/或摆动控制处理。
17、可选的,所述边缘定位计算装置,用于在所述掘进机启动前,将所述距离信息与预设的距离阈值进行比对处理;基于比对结果对所述距离信息进行数据清洗处理;基于进行了数据清洗处理后的距离信息以及所述基站位置信息确定所述标签位置信息并存储在数据库中。
18、可选的,所述边缘定位计算装置,用于在所述掘进机启动后,将所述距离信息与所述距离阈值进行比对处理,基于比对结果对所述距离信息进行数据清洗处理;基于进行了数据清洗处理后的距离信息以及所述基站位置信息确定所述标签位置信息,作为观测值;获取所述数据库中存储的标签位置信息,作为先验值;计算所述观测值和所述先验值之间的偏差,作为估计偏差;基于所述估计偏差与最优估计偏差的对比结果,确定所述标签位置信息以及所述最优估计偏差,并存储在数据库中。
19、可选的,所述边缘定位计算装置,用于根据两个uwb定位基站与所述uwb定位标签的距离信息以及所述两个uwb定位基站的基站位置信息,确定所述标签位置信息;其中,所述标签位置信息包括:二维坐标信息。
20、可选的,所述边缘定位计算装置,用于根据四个uwb定位基站与所述uwb定位标签的距离信息以及所述四个uwb定位基站的基站位置信息,确定所述标签位置信息;其中,所述标签位置信息包括:三维坐标信息。
21、可选的,人机交互系统,用于接收所述边缘定位计算装置发送的所述标签位置信息,并对所述标签位置信息进行显示处理。
22、根据本公开的第三方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述指令被处理器执行如上所述的方法。
23、根据本公开的第四方面,提供一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现如上所述的方法的步骤。
24、本公开的矿山掘进设备的物料转载控制方法、系统、存储介质以及计算机程序产品,能够避免物料转载点出现物料堆积的情况,降低矿山掘进工作面作业人员的工作强度;利用uwb技术能够在高粉尘、光线不足的矿山掘进巷道等场景中提高测量精度因素;可以减少设备故障率、提高掘进效率,增强矿山掘进设备作业的稳定性和安全性。
- 还没有人留言评论。精彩留言会获得点赞!