一种基于信道状态信息的车辆无线非接触感知方法和系统
本发明涉及无人驾驶车辆感知,具体涉及一种基于信道状态信息的车辆无线非接触感知方法和系统。
背景技术:
1、随着网联化汽车的普及,对无人驾驶车辆的感知能力要求越来越高。在近距离内车辆感知技术中,超声波雷达的感知较为成熟,但局限性较大,突出表现细小的被测物难以反射声波,某些特定形状难以捕捉反射波,温度变化5-10度以上会影响感应精度,其稳定性和可靠性不稳定。相反,利用分米波信号来无线感知周围的环境感知精度可达毫米级别,可在白天黑夜使用,配合摄像头感知技术可做到较低成本下全天候的全域感知覆盖。
2、在移动计算领域,研究发现无线电信号不仅可用于传输数据,还可以用来感知环境。信号发射机产生的无线电波经由直射、反射、散射等多条路径传播,在信号接收机处形成的多径叠加信号携带反映环境特征的信息。采用无线电信号进行手势、动作和运动状态捕捉,为人体行为识别提供一种新的途径和方法,这已经成为了一种较为成熟的应用。
3、基于分米波的感知方法应用较少,早期的相关类似方法是基于wifi的非接触式感知,这种感知的精度和应用范围均非常有限,直到802.11n物理层的信道状态信息(channelstate information,csi)可从商用设备中得到后,借助其对信号多径传播的刻画能力以及反映在各子载波上精细的振幅和相位信息,基于wifi的感知应用才有了快速发展。之后逐渐涌现出了从人体跌倒这样粗粒度的活动检测到穿墙统计人数,感知行走方向以及检测手势和呼吸心跳这样细粒度的活动检测等一系列的应用。
4、美国的manikantakotaru提出了利用wifi网卡提供的30个子载波上的信息,增加虚拟天线的数量,从而降低普通wifi网卡天线数对信号区分及到达角度估计的影响,提高直接通路信号的到达角度估计精度,从而定位wifi信号发射设备。然而,该方法的目标是用来定位wifi信号发射设备的位置,不能确定一个运动的反射wifi信号的物体的位置。美国的kiran joshi提出了建立一种自发自收的无线局域网设备,自己发出的信号经过反射后再被自己接收,通过后期信号处理分析出每条反射路径的长度、到达角度以及信号强度,根据定位目标的活动性找出定位目标反射的路径,最终确定目标的位置,然而,该方法需要对现有wifi设备进行修改,改变传统的wifi工作模式,无法在商业wifi设备上实现。
技术实现思路
1、为解决目前基于wifi的非接触式感知技术无法定位目标物体位置以及感知精度和应用范围受限等问题,本发明提出了一种基于信道状态信息的车辆无线非接触感知方法,使用分米波作为无线感知的信号源,不受周围光线的影响,非接触式感知周围的环境感知精度高,经分窗计算移动能量值确定障碍物再判断其置信度以确认目标物体,并通过构建相互垂直的菲涅尔区的边界交点实现目标物体的精确定位。本发明还涉及一种基于信道状态信息的车辆无线非接触感知系统。
2、本发明的技术方案如下:
3、一种基于信道状态信息的车辆无线非接触感知方法,其特征在于,包括以下步骤:
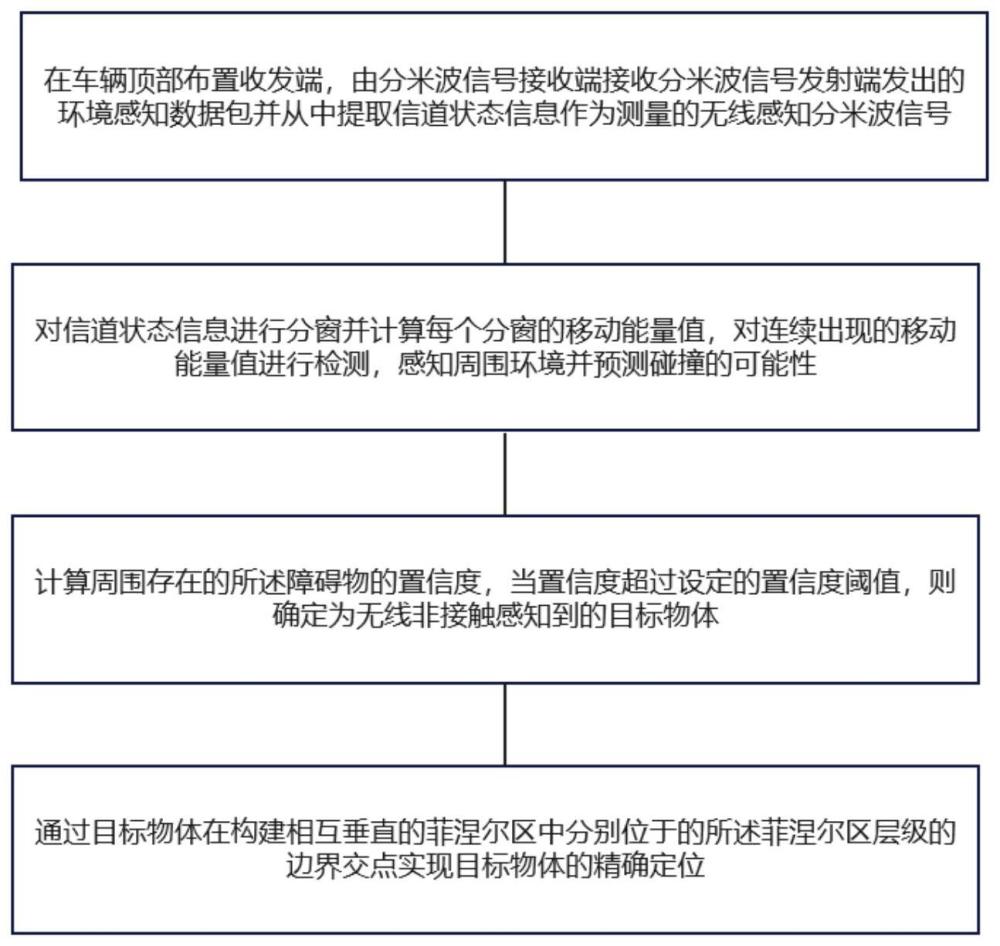
4、s1、在车辆顶部布置一个支持测量信道状态信息的分米波信号发射端以及两个均与所述分米波信号发射端对应的提供信道状态信息的分米波信号接收端,由分米波信号接收端接收分米波信号发射端发出的环境感知数据包并从中提取信道状态信息作为测量的无线感知分米波信号;
5、s2、对信道状态信息进行分窗,并计算每个分窗的移动能量值,对连续出现的移动能量值进行检测,感知周围环境并预测碰撞的可能性,在所述连续出现的移动能量值超过设定的障碍物阈值时判断周围存在障碍物;
6、s3、计算周围存在的所述障碍物的置信度,当置信度超过设定的置信度阈值,则确定为无线非接触感知到的目标物体;
7、s4、对无线非接触感知到的目标物体进行定位:两个分米波信号接收端同时从分米波信号发射端获取测量的无线感知分米波信号包含若干对载波,所述若干对载波中的至少一对载波,以分米波信号发射端的位置和第一分米波信号接收端的位置为椭圆两焦点,构建m层菲涅尔区;所述若干载波中的至少另一对载波,以分米波信号发射端的位置和第二分米波信号接收端的位置为椭圆两焦点,构建n层菲涅尔区,且所述n层菲涅尔区与所述m层菲涅尔区相互垂直;根据第一分米波信号接收端在一时间段内接收到的所述无线感知分米波信号,在所述m层菲涅尔区中,根据菲涅尔相位差和菲涅尔相位偏移,确定目标物体位于的菲涅尔区层级;根据第二分米波信号接收端在相应时间段内接收到的所述无线感知分米波信号,在所述n层菲涅尔区中,根据菲涅尔相位差和菲涅尔相位偏移,确定目标物体位于的菲涅尔区层级;确定目标物体在m层菲涅尔区中位于的所述菲涅尔区层级与n层菲涅尔区中位于的所述菲涅尔区层级的边界交点,并根据所述边界交点确定目标物体的位置。
8、优选地,s1步骤中,提取信道状态信息后通过卡尔曼滤波算法进行滤波融合及误差补充处理,处理后信道状态信息作为测量的无线感知信号;s2步骤中,对处理后的信道状态信息进行分窗。
9、优选地,s2步骤中,计算每个分窗的移动能量值具体为:先计算出一个长窗口信号的均值,并将信道状态信息减去此均值,以去除csi中的直流分量,然后把分窗后的信号通过fft变换从时域转换到频域,得到fft变换结果的各个系数,再根据各个系数计算移动能量。
10、优选地,所述m层菲涅尔区和n层菲涅尔区均是收发端周围形成的一系列同心椭圆-菲涅尔区,且第一层菲涅尔区信号传播路径比各自对应收发端距离多半个波长,第二层菲涅尔区信号传播路径比各自对应收发端距离多半个波长,每层菲涅尔区比前一层多半个波长。
11、优选地,两个分米波信号接收端分别布置在车头两侧,分米波信号发射端布置在车尾,各收发端均设置相应天线,用天线搭建均匀线性天线阵列且天线间隔不超过所用分米波的半波长,由分米波信号接收端用均匀线性天线阵列接收分米波信号发射端发出的环境感知数据包并从中提取信道状态信息作为测量的无线感知分米波信号。
12、优选地,s3步骤是利用神经网络计算置信度及确定具体种类,通过预先采集的大量带有人工标注的信道状态信息的数据,训练神经网络,所述神经网络的输入为信道状态信息,输出为所述障碍物的种类及其置信度。
13、一种基于信道状态信息的车辆无线非接触感知系统,其特征在于,包括依次连接的分米波无线感知模块、障碍物判断模块、置信度计算模块和菲涅尔区定位模块,
14、所述分米波无线感知模块,在车辆顶部布置一个支持测量信道状态信息的分米波信号发射端以及两个均与所述分米波信号发射端对应的提供信道状态信息的分米波信号接收端,由分米波信号接收端接收分米波信号发射端发出的环境感知数据包并从中提取信道状态信息作为测量的无线感知分米波信号;
15、所述障碍物判断模块,对信道状态信息进行分窗,并计算每个分窗的移动能量值,对连续出现的移动能量值进行检测,感知周围环境并预测碰撞的可能性,在所述连续出现的移动能量值超过设定的障碍物阈值时判断周围存在障碍物;
16、所述置信度计算模块,计算周围存在的所述障碍物的置信度,当置信度超过设定的置信度阈值,则确定为无线非接触感知到的目标物体;
17、所述菲涅尔区定位模块,对无线非接触感知到的目标物体进行定位:两个分米波信号接收端同时从分米波信号发射端获取测量的无线感知分米波信号包含若干对载波,所述若干对载波中的至少一对载波,以分米波信号发射端的位置和第一分米波信号接收端的位置为椭圆两焦点,构建m层菲涅尔区;所述若干载波中的至少另一对载波,以分米波信号发射端的位置和第二分米波信号接收端的位置为椭圆两焦点,构建n层菲涅尔区,且所述n层菲涅尔区与所述m层菲涅尔区相互垂直;根据第一分米波信号接收端在一时间段内接收到的所述无线感知分米波信号,在所述m层菲涅尔区中,根据菲涅尔相位差和菲涅尔相位偏移,确定目标物体位于的菲涅尔区层级;根据第二分米波信号接收端在相应时间段内接收到的所述无线感知分米波信号,在所述n层菲涅尔区中,根据菲涅尔相位差和菲涅尔相位偏移,确定目标物体位于的菲涅尔区层级;确定目标物体在m层菲涅尔区中位于的所述菲涅尔区层级与n层菲涅尔区中位于的所述菲涅尔区层级的边界交点,并根据所述边界交点确定目标物体的位置。
18、优选地,所述分米波无线感知模块在提取信道状态信息后通过卡尔曼滤波算法进行滤波融合及误差补充处理,处理后信道状态信息作为测量的无线感知信号;所述障碍物判断模块对处理后的信道状态信息进行分窗。
19、优选地,所述障碍物判断模块计算每个分窗的移动能量值具体为:先计算出一个长窗口信号的均值,并将信道状态信息减去此均值,以去除csi中的直流分量,然后把分窗后的信号通过fft变换从时域转换到频域,得到fft变换结果的各个系数,再根据各个系数计算移动能量。
20、优选地,所述置信度计算模块是利用神经网络计算置信度及确定具体种类,通过预先采集的大量带有人工标注的信道状态信息的数据,训练神经网络,所述神经网络的输入为信道状态信息,输出为所述障碍物的种类及其置信度。
21、本发明的有益效果为:
22、本发明提出一种基于信道状态信息的车辆无线非接触感知方法,使用分米波作为无线感知的信号源,非接触式感知周围的环境感知精度高,可达毫米级别,对无人驾驶近距离感知有较大提高,相对于传统毫米波雷达不适用近距离感知,且感知范围有限,分米波信号感知无死角,可做到360度空间无死角感知;相对于激光雷达传感器成本较低;相对于摄像头传感器来说可以做到白天黑夜全时域感知,不受周围光线变化的影响。可在白天黑夜使用,可以做到比摄像头成本更低的全天候的全域感知覆盖。感知精度可调,可以实现不同感知要求条件下感知精度的调整适用于不同的感知任务要求。将分米波感知的极限提升到厘米级,同时保有分米波的穿透能力,过滤树叶、塑料袋等干扰。其过滤能力是指波长在43cm的电磁波能够穿透路边塑料袋、树叶等对车辆行驶影响较小的障碍物,当电磁波穿透障碍物时,分米波信号接收端接收到的信号并没有受到影响,因此不会将其视为障碍物,这比较好地解决了自动驾驶汽激光雷达、毫米波雷达会将树叶和塑料袋区域检测为不可行驶区域的难题。本发明将基于分米波感知技术应用到无人驾驶车辆的感知中,包括人、车和路的状态信息,这将突破传统的视频、图像监控检测技术,不依赖于环境和正确设置设备的要求,提供一种高效、低成本的驾驶行为实时感知手段,分米波信号中提取信道状态信息(channel state information,csi)进行分窗,计算每个分窗的移动能量值,对连续出现的移动能量值进行检测,感知周围环境并预测碰撞的可能性,在连续出现的移动能量值超过设定的障碍物阈值时判断周围存在障碍物,该障碍物可能是人、车、物体等不同种类,然后可利用神经网络计算置信度确定具体种类,进而确定为无线非接触感知到的目标物体,再结合均车辆顶部布置的一个支分米波信号发射端以及两个分米波信号接收端,构建特定的相互垂直并相交的菲涅尔区,并布满周围空间,基于菲涅尔相位差和菲涅尔相位偏移并利用菲涅尔区定位技术,通过目标物体位于的相互垂直的两菲尼尔区的层级的边界交点实现目标物体的精确定位,解决了现有技术基于wifi的非接触式感知技术无法定位目标物体位置以及感知精度和应用范围受限等问题,本发明的这种感知方法可以时刻反应周围物体的运动变化,实时得到周围环境的变化,对环境进行感知为自动驾驶车辆的决策规划提供依据,且该感知方法无惧环境变化,不受周围光线的影响,是一种全天候的车辆感知方法,该方法易于实现及应用,并有效地减少了自动驾驶汽车感知的误识别,能够无线非接触感知识别及定位,感知精度高,具有巨大的应用前景。
23、本发明还涉及一种基于信道状态信息的车辆无线非接触感知系统,与上述的基于信道状态信息的车辆无线非接触感知方法相对应,可理解为一种基于信道状态信息的车辆无线非接触感知方法的实现系统,包括依次连接的分米波无线感知模块、障碍物判断模块、置信度计算模块和菲涅尔区定位模块,各模块相互协同工作,使用分米波作为无线感知的信号源,不受周围光线的影响,非接触式感知周围的环境感知精度高,然后对接收端测量的csi信号进行分窗,并计算每个分窗的移动能量值,对连续出现的移动能量值进行检测,确定障碍物再判断其置信度以确认目标物体,并通过构建相互垂直的菲涅尔区的边界交点实现目标物体的精确定位,本发明将基于分米波感知技术应用到无人驾驶车辆的感知中,包括人、车和路的状态信息,系统整体结构设计巧妙,易于实现及使用,大幅提高了车辆无线非接触感知精度。
- 还没有人留言评论。精彩留言会获得点赞!