路侧视觉传感器多节点部署的方法、装置、设备及介质
本技术涉及智能交通,特别涉及一种路侧视觉传感器多节点部署的方法、装置、设备及介质。
背景技术:
1、“车-路-云”一体化协同系统是当前智能交通领域的研究热点和发展趋势,该系统通过新一代信息与通信技术将人、车、路、云的物理空间与信息空间融为一体,基于协同感知、决策与控制,实现智能网联汽车交通系统安全、节能、舒适及高效的信息物理系统。云平台实时获取实时交通数据,为智能网联车辆与路侧交通信号灯做出决策控制,需要通过路侧感知设备实时传输其感知到的道路交通信息数据,所以路侧感知设备担任及其重要的任务,其中,视觉传感器在部署的便利性、成本以及感知颜色等各方面占据很大优势,是路侧感知设备中最重要的硬件之一,在路侧感知系统中的主要作用有目标识别与目标跟踪等。为了保证路侧视觉传感器可以辨识道路上的各交通参与者动态信息,以便向云控平台提供完整的交通数据,需要路侧视觉传感器网络具有高可靠的感知质量,其中最重要的则是路侧视觉传感器可以获得完整的道路交通感知数据,因此,路侧视觉传感器的节点部署成为一个关键的先决条件。
2、现有的视觉传感器部署中,通过开发一种基于二进制整数规划的两阶段算法,以解决更大空间下的传感器最优部署问题,利用最少的成本达到所需要的目标覆盖率,或者,在相机部署的过程中,通过探索相机成像质量与分辨率、离焦、几何畸变和遮挡四个因素之间的关系,推导出相机的各项异质性感知模型,使得相机部署后的观测质量更为高效,另外,在办公室内部署相机时,则是考虑相机视域之间的重叠部分,确保相机视域之间有着足够的重叠区域,以便人物在无法跟踪或识别之前,能够成功的切换相机。
3、然而,目前主要的视觉传感器部署问题较多用于监控领域,对需要监控的区域形成视觉覆盖,针对“车-路-云”一体化协同控制系统下的路侧视觉传感器多节点部署问题研究还是较少,这两类问题所存在的区别在于,后者的视觉传感器任务,主要包含目标检测识别,目标跟踪等感知任务,传感器的覆盖范围不等于传感器的感知范围,需要使用传感器的感知范围进行建模,其次,目标在经过两个视觉传感器之间时,还要完成目标身份交接任务,即目标的跨视域重识别跟踪任务,传感器之间的感知域重叠距离也是需要考虑的内容,路网的面积也是非常庞大,导致计算复杂度也较高,贪心算法、局部搜索等算法在路网部署问题中则容易陷入局部最优,降低了路网部署的适用性和可靠性,无法满足路侧视觉传感器的部署需求,亟待改善。
技术实现思路
1、本技术是基于发明人对以下问题和认识作出的:
2、目前针对视觉传感器的部署问题,主要是针对某区域的监控传感器布置问题,实现对指定区域的感知覆盖任务。
3、视觉传感器的覆盖问题主要可以分为四类:(1)区域覆盖,即布置传感器以监控一个多边形区域;(2)点覆盖,即布置传感器以监控特定位置;(3)栅栏覆盖,即布置传感器使得其感知范围在给定区域内形成连续的栅栏,以感知沿任意轨迹横向穿越这一区域的目标;(4)空间覆盖,即布置传感器感知立体区域或空间物体的表面。布置传感器的要求常会涉及到传感器的部署总量或总成本、每个目标被感知的传感器数量、传感器的视场角范围、目标被感知的概率的等,此外还会结合被感知区域的地形问题,障碍物遮挡问题,无法布置传感器的区域,以及传感器间的通信问题等。
4、求解视觉传感器的部署问题,一般方法是先明确需要部署视觉传感器的场景,根据任务展开数学建模,首先建立传感器的感知模型,主要考虑传感器的感知范围与感知性能,传感器的感知范围在需要被感知覆盖平面上所呈现的形状与传感器的类型和安装方式有关,例如,全向传感器的感知范围一般建模为圆形,定向传感器感知范围一般建模为扇形,考虑安装位置与姿态的定向传感器则建模为四边形,而感知性能主要与目标与传感器之间距离有联系,例如,摄像头会针对不同距离的像素密度进行建模,而雷达则会考虑传播效应对信号能量的影响,对传感器建模完后,则对感知区域进行建模,随后根据模型与任务形成部署问题的目标与约束条件,最后通过适当算法进行求解。
5、目前,主要的视觉传感器部署问题较多还是用于监控领域,对需要监控的区域形成视觉覆盖,针对“车-路-云”一体化协同控制系统下的路侧视觉传感器多节点部署问题研究还是较少,这两类问题所存在的区别在于,后者的视觉传感器任务,主要包含目标检测识别,目标跟踪等感知任务,传感器的覆盖范围不等于传感器的感知范围,需要使用传感器的感知范围进行建模,其次,目标在经过两个视觉传感器之间时,还要完成目标身份交接任务,即目标的跨视域重识别跟踪任务,传感器之间的感知域重叠距离也是需要考虑的内容,路网的面积也是非常庞大,计算复杂度也较高,贪心算法、局部搜索等算法在路网部署问题中则容易陷入局部最优,针对路网中的路侧视觉传感器部署问题,亟待改善。
6、本技术提供一种路侧视觉传感器多节点部署的方法、装置、设备及介质,以解决由于路网面积庞大,导致计算复杂度较高,并且相关算法在路网部署问题中容易陷入局部最优,降低了路网部署的适用性和可靠性,无法满足路侧视觉传感器的部署需求的问题。
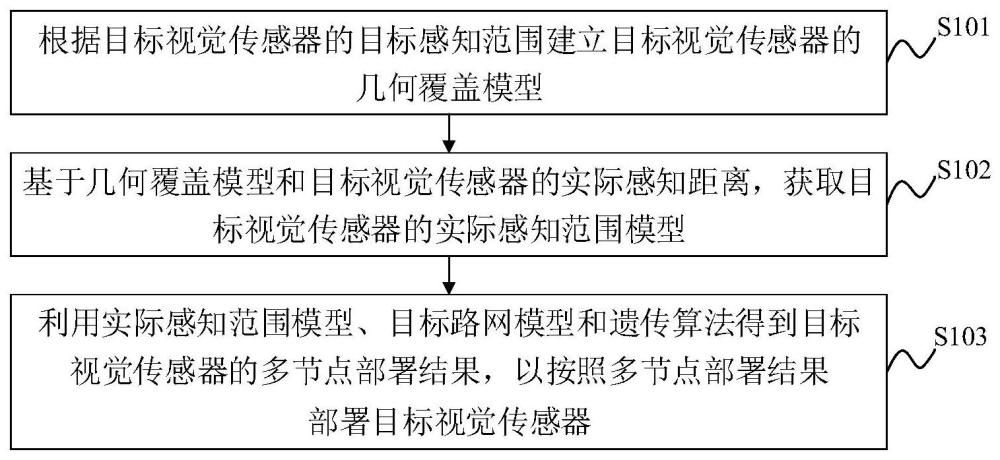
7、本技术第一方面实施例提供一种路侧视觉传感器多节点部署的方法,包括以下步骤:根据目标视觉传感器的目标感知范围建立所述目标视觉传感器的几何覆盖模型;基于所述几何覆盖模型和所述目标视觉传感器的实际感知距离,获取所述目标视觉传感器的实际感知范围模型;利用所述实际感知范围模型、目标路网模型和遗传算法得到所述目标视觉传感器的多节点部署结果,以按照所述多节点部署结果部署所述目标视觉传感器。
8、可选地,在本技术的一个实施例中,所述基于所述几何覆盖模型和所述目标视觉传感器的实际感知距离,获取所述目标视觉传感器的实际感知范围模型,包括:根据预设目标感知算法与目标感知实验的结果确定所述实际感知距离;利用所述几何覆盖模型和所述实际感知距离获取所述目标视觉传感器的实际感知范围模型。
9、可选地,在本技术的一个实施例中,所述目标路网模型,包括:将连续视觉传感器的可部署空间进行离散化处理,得到多个目标可部署点位;将目标连续道路的空间进行离散化处理,得到多个目标单元格;根据所述多个目标可部署点位和所述多个目标单元格得到所述目标路网模型。
10、可选地,在本技术的一个实施例中,所述得到所述目标视觉传感器的多节点部署结果,包括:检测所述目标连续道路的相邻视觉传感器之间是否需要设置满足预设条件的必要感知域重叠距离;在检测到所述相邻视觉传感器之间需要设置满足预设条件的必要感知域重叠距离的情况下,基于所述目标视觉传感器的跨域感知性能,确定所述相邻视觉传感器之间的所述必要感知域重叠距离;利用所述必要感知域重叠距离确定所述目标视觉传感器的多节点部署结果。
11、本技术第二方面实施例提供一种路侧视觉传感器多节点部署的装置,包括:建立模块,用于根据目标视觉传感器的目标感知范围建立所述目标视觉传感器的几何覆盖模型;获取模块,用于基于所述几何覆盖模型和所述目标视觉传感器的实际感知距离,获取所述目标视觉传感器的实际感知范围模型;部署模块,用于利用所述实际感知范围模型、目标路网模型和遗传算法得到所述目标视觉传感器的多节点部署结果,以按照所述多节点部署结果部署所述目标视觉传感器。
12、可选地,在本技术的一个实施例中,所述获取模块包括:第一确定单元,用于根据预设目标感知算法与目标感知实验的结果确定所述实际感知距离;获取单元,用于利用所述几何覆盖模型和所述实际感知距离获取所述目标视觉传感器的实际感知范围模型。
13、可选地,在本技术的一个实施例中,所述部署模块包括:第二确定单元,用于将连续视觉传感器的可部署空间进行离散化处理,得到多个目标可部署点位;第三确定单元,用于将目标连续道路的空间进行离散化处理,得到多个目标单元格;建立单元,用于根据所述多个目标可部署点位和所述多个目标单元格得到所述目标路网模型。
14、可选地,在本技术的一个实施例中,所述部署模块包括:检测单元,用于检测所述目标连续道路的相邻视觉传感器之间是否需要设置满足预设条件的必要感知域重叠距离;处理单元,用于在检测到所述相邻视觉传感器之间需要设置满足预设条件的必要感知域重叠距离的情况下,基于所述目标视觉传感器的跨域感知性能,确定所述相邻视觉传感器之间的所述必要感知域重叠距离;第四确定单元,用于利用所述必要感知域重叠距离确定所述目标视觉传感器的多节点部署结果。
15、本技术第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的路侧视觉传感器多节点部署的方法。
16、本技术第四方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,该程序被处理器执行时实现如上的路侧视觉传感器多节点部署的方法。
17、本技术第五方面实施例提供一种计算机程序,所述计算机程序被执行时,以用于实现如上的路侧视觉传感器多节点部署的方法。
18、本技术实施例可以根据目标视觉传感器的几何覆盖模型和目标视觉传感器的实际感知距离得到实际感知范围模型,利用实际感知范围模型、目标路网模型和遗传算法得到目标视觉传感器的多节点部署结果,以按照多节点部署结果部署目标视觉传感器,实现对不同构型的路网部署路侧视觉传感器的功能,有效的降低计算复杂度,提升路网部署的适用性和可靠性。由此,解决了由于路网面积庞大,导致计算复杂度较高,并且相关算法在路网部署问题中容易陷入局部最优,降低了路网部署的适用性和可靠性,无法满足路侧视觉传感器的部署需求的问题。
19、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!