一种水听器阵列同步数据采集系统及方法与流程
本发明涉及多通道信号采集相位同步,具体地说是涉及一种水听器阵列同步数据采集系统及方法。
背景技术:
1、目前,用于捕获海洋信息的仪器有很多,常见的水下探测平台载人潜水器(hov)、水下无人航行器(uuv)以及声呐(sonar)都装备了水声阵列采集系统。其中,声呐等阵列探测设备通过对水下环境的感知、采集、控制传输以及分析处理来完成对水下目标的探测、识别以及反潜、定位等功能。这一过程涉及到对水下复杂环境的精细捕捉,以及对采集数据的科学分析和处理,从而确保对水下目标的准确识别和定位,为水下反潜等任务提供坚实的技术支持。然而,随着海洋探测需求的提高,对海洋探测设备中的水声阵列采集系统提出了更高的要求,其中,水下探测系统的隐蔽性、可靠性、可扩展性以及相位一致性等性能指标显得尤为重要,因此在设计时需要考虑更多的问题和难点。水下探测装备在实际使用过程中容易引入各种时变和时不变的因素,导致系统采集的阵列信号产生相位误差。以声呐系统装备为代表,为了实现水下的多维度、阵列化探测,系统中常搭载多种复合水声传感器以保证对海洋的温度、深度以及水声等物理量的准确采集。但复杂的探测任务给阵列探测系统带来了不小的挑战,在实现阵列化、多维度探测时,系统不仅需要更高的传输速率及更多的可扩展外设引脚,更重要的是要确保采集到的阵列水声多通道信号具备高度的相位一致性,然而常见的声呐等水声探测仪器内部搭载的水声探测阵列,通常存在传感器声学中心位置扰动的问题,这种扰动会严重影响阵列探测信号的相位一致性。另外,系统中搭载的水声传感器及包含电阻、电容、电感(r、c、l)等元器件的模拟电路,在制造过程中可能会受工艺问题的影响,导致器件的一致性存在偏差,使得系统产生较大的相位误差,从而影响具备水声定位及探测等功能的海洋探测设备对水下目标信号的识别与勘探。
技术实现思路
1、本发明的目的在于提供一种水听器阵列同步数据采集系统及方法,以解决“针对现有传感器响应时间、模拟电路分立元件工艺、信号传输线路长度一致性等方面存在偏差,导致多通道信号相位一致性较差” 的技术问题。
2、为了达到上述目的,本发明所采用的技术解决方案如下:
3、一种水听器阵列同步数据采集系统,包括:
4、adc驱动模块,以第一设定频率对多通道水声信号进行采样,将采样后的多通道数字信号发送至倍采样ram模块或者时延缓存ram模块;
5、时延缓存ram模块,接收adc驱动模块传来的多通道数字信号,并依据是否有来自时延求解模块或者eeprom存储模块的相位校正系数,对adc驱动模块传来的多通道数字信号进行时延传输;
6、倍采样ram模块,将第一设定频率的adc采样频率跨时钟域到第二设定频率的fft采样频率,并将adc驱动模块的多通道数字信号缓存进来,以备发送到fft模块中;
7、fft模块,将倍采样ram模块中的多通道数字信号进行fft变换;
8、峰值检测模块,将多通道数字信号由fft变换出来的实数和虚数求模值计算,并通过遍历的手段找出幅频域中最大幅值处的频点以及实部和虚部;
9、cordic模块,将最大幅值处实部和虚部进行反正切相位求解,并解出参考通道和待校正通道的相位误差;
10、时延求解模块,接收cordic模块解出的相位误差,将相位误差转换成时延差,并用计数器算出最终的相位校正系数;
11、eeprom存储模块,存储不同窄带的中心频点处相位误差校正系数;
12、并串转换模块,对多通道并行信号转换为串行数据流,并将串行数据流发送到缓存模块;
13、缓存模块,跨时钟域缓存并串转换模块的数据流并传输到发送模块;
14、发送模块,将数据流发送到上位机。
15、优选的,所述第一设定频率为200khz。
16、优选的,所述第二设定频率为50mhz。
17、优选的,fft变换共进行16384点变换。
18、优选的,所述发送模块为以太网发送模块。
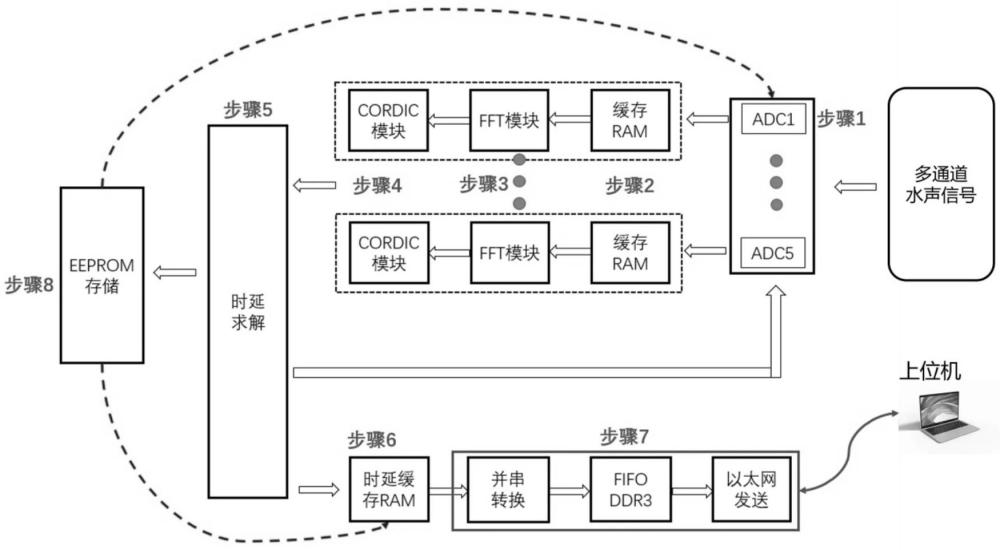
19、一种水听器阵列同步数据采集方法,应用上述的水听器阵列同步数据采集系统,所述方法包括如下步骤:
20、步骤1:将水听器阵列采集的多通道水声信号进行放大和滤波调理,调理之后的多通道水声信号由adc驱动模块进行控制采集,将采集后的多通道数字信号送入时延缓存ram模块中,进入步骤2;同时,接收并判断来自步骤8的eeprom存储模块或者步骤5的时延求解模块的相位校正系数是否为0,如果为0,则表示相位误差为0或者还未计算出相位校正系数,进入步骤2;如果不为0,则由adc驱动模块进行时延计数,同时将参考通道数据送入时延缓存ram模块中,待时延结束后将校正通道数据送入时延缓存ram模块中,进入步骤6;
21、步骤2:当处在相位校正模式中时,时延缓存ram模块将采样频率从200khz变换到50mhz,并将缓存中的缓存数据发送到50mhz时钟域的fft模块中处理,进入步骤3;
22、步骤3:fft模块将多通道数字信号作16384点fft变换,把多通道数字信号从实数域变换到复数域,并将复数数据进行峰值检测;峰值检测模块将多通道数字信号由fft变换出来的实数和虚数进行平方和计算,再通过遍历的手段找出幅频域中峰值处的频点以及实部和虚部,并依据该频点进入步骤8,通过查找表的方式找到该频点处的相位校正系数,将该相位校正系数送到adc驱动模块和时延缓存ram模块;若没有找到该频点处的相位校正系数值,则将该频点处的实部和虚部值送入cordic模块,进入步骤4;
23、步骤4:cordic模块将峰值处实部和虚部进行反正切相位求解,依据cordic算法求解的多通道相位值求出多个通道之间的相位误差,cordic模块将相位最超前的通道作为参考通道,校正其余通道的相位误差,并将相位误差值送入时延求解模块,进入步骤5;
24、步骤5:将cordic模块解出的相位误差换算成时延差,并设计一个计数器,计算出要延时的相位校正系数,同时将该相位校正系数送入eeprom存储模块中,存储该频点下的相位校正系数;另外,相位校正系数还要同时送入时延缓存ram模块和adc驱动模块中负责时延校正,进入步骤6;
25、步骤6:将adc驱动模块校正通道、参考通道的数字信号以及相位校正系数按照时序逻辑送入时延缓存ram模块中,参考通道数字信号依据相位校正系数在该处缓存等待,待时延结束后将校正通道和参考通道的数字信号送入并串转换模块,进入步骤7;
26、步骤7:校正成功的多通道数字信号通过并串转换模块,将并行数据转换成串行数据流,并将数据流通过fifo和ddr3缓存模块跨时钟域连接以太网发送模块,再由以太网发送模块将数据流发送到上位机;
27、步骤8:存储并调用目标频带内的相位校正系数;在对阵列信号相位检测及校正时,查找eeprom存储模块的存储列表里有无该频点的相位校正系数,如果没有,则需要等待步骤6中计算的相位校正系数,并将结果保存;如果有,则直接将该频点处的相位校正系数送到adc驱动模块和时延缓存ram模块中。
28、本发明的有益技术效果是:
29、1、本发明的水听器阵列同步数据采集系统及方法,同步精度高。一方面,相位校正系数cnt只需通过改变时钟频率便可提高相位补偿的精度,减少相位误差;另一方面,相位误差转时延差的计算过程,全部采用浮点数进行计算,相比采用定点数而言,其计算准确度更高,具有更小的运算误差。
30、2、本发明的水听器阵列同步数据采集系统及方法,在相位校正方面兼顾了校正时间和频率分辨率。一方面,其内部设计的倍采样ram模块将200khz和50mhz的采样频率联系起来,使得fft模块在50mhz的时钟而非200khz时钟下进行快速傅里叶变换,克服了200khz时钟下变换速度太慢的问题;另一方面,克服了做16384点fft时,直接使用50mhz采样频率,其频率分辨率df=5*10^7/16384=3051hz太粗的问题,经过倍采样ram模块联系,其频率分辨率df=2*10^5/16384=12hz,大幅提高了频率分辨率。
31、3、本发明的水听器阵列同步数据采集系统及方法,不仅可以校准电路中元器件工艺不一致、线路不等长造成的相位误差,还可以校准水听器工艺问题造成的相位误差,实现端到端的系统级相位校正。
- 还没有人留言评论。精彩留言会获得点赞!