基于虚拟阵列的两阶段主瓣宽度可变波束形成方法
本发明属于麦克风阵列的波束形成,具体涉及一种基于虚拟阵列的两阶段主瓣宽度可变波束形成方法。
背景技术:
1、波束成形是一种经典的空间滤波方法,通过空间滤波器从噪声观测和干扰中提取出所需信号,已被应用于无线通信、助听器和电话会议系统等领域。基本思想是形成一个空间滤波器,使得来自期望方向的信号被尽可能多地保留,而来自其他方向的信号被衰减,其中衰减量取决于所设计的波束图案。
2、在众多的麦克风阵列波束形成技术中,差分麦克风阵列波束形成由于具有频率不变的波束图,小而紧凑的孔径和最大指向性潜力的特性,吸引了许多研究兴趣。dma波束成形最初受到定向带式麦克风的启发,利用麦克风阵列中相邻的麦克风的声压差来实现波束形成。然而,差分麦克风阵列波束形成的频率不变特性会因算法的不同在高频丢失。
3、当前现有技术已经开发了多种差分麦克风阵列波束形成技术,比如基于jacobi-anger展开的波束形成方法,是目前使用最广泛的方法,通过将导向矢量进行jacobi-anger展开来最小化目标方向性图案和合成波束图之间的平方误差得到对应的波束形成权值,但是该方法的波束图在高频可能出现失真。基于mmse的方法通过最小化目标方向性图案和合成波束图之间的均方误差得到对应的波束形成权值,mmse法可以在阵元数量相同的情况下实现最小的波束图失真,但对应的,白噪声增益在低频的表现不好。
4、综上,现有方法都难以兼顾高频下较低的波束图失真和低频下较高的白噪声增益,且难以控制主瓣宽度,在实际应用中有所不足。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于虚拟阵列的两阶段主瓣宽度可变波束形成方法,能够在实现最小波束图失真的情况下,通过主瓣宽度和旁瓣级的取舍以及两阶段的波束形成提高低频下的白噪声增益。
2、其设计了由多个dma组成的更大阵列的平面差分波束形成器,其中传统dma被视为基本单元。波束形成分为两个阶段,首先dma单元使用mmse法进行基本的差分波束形成,并将传统的目标方向性图案更改为基于dolph-chebyshev多项式的形式,主瓣宽度和旁瓣级变得可控;第二阶段通过组合多个dma单元的输出进一步提升波束形成的性能。将多个dma单元进行线性组合并视为虚拟的平面阵列,则全局阵列的导向向量可以视为dma单元的导向向量与虚拟阵列导向向量的克罗内克积,全局波束形成器被设计为基本差分波束形成器和对应于虚拟阵列的波束形成器的克罗内克积。使用本方法可以在阵元数量相同的情况下实现最小波束图失真,并通过主瓣宽度和旁瓣级的取舍以及两阶段的波束形成缓解mmse法低频下的白噪声增益过低的问题。
3、本发明解决其技术问题具体采用的技术方案是:
4、一种基于虚拟阵列的两阶段主瓣宽度可变波束形成方法
5、以差分麦克风阵列作为基本单元,由多个差分麦克风阵列组成更大阵列的平面差分波束形成器;
6、波束形成分为两个阶段:首先差分麦克风阵列单元使用mmse波束形成方法进行基本的差分波束形成,并采用基于dolph-chebyshev多项式的形式的目标方向性图案,使主瓣宽度和旁瓣级可控;再通过组合多个差分麦克风阵列单元的输出进一步提升波束形成的性能;将多个差分麦克风阵列单元进行线性组合并视为虚拟的平面阵列,则全局阵列的导向向量视为差分麦克风阵列单元的导向向量与虚拟阵列导向向量的克罗内克积,全局波束形成器采用基本差分波束形成器和对应于虚拟阵列的波束形成器的克罗内克积。
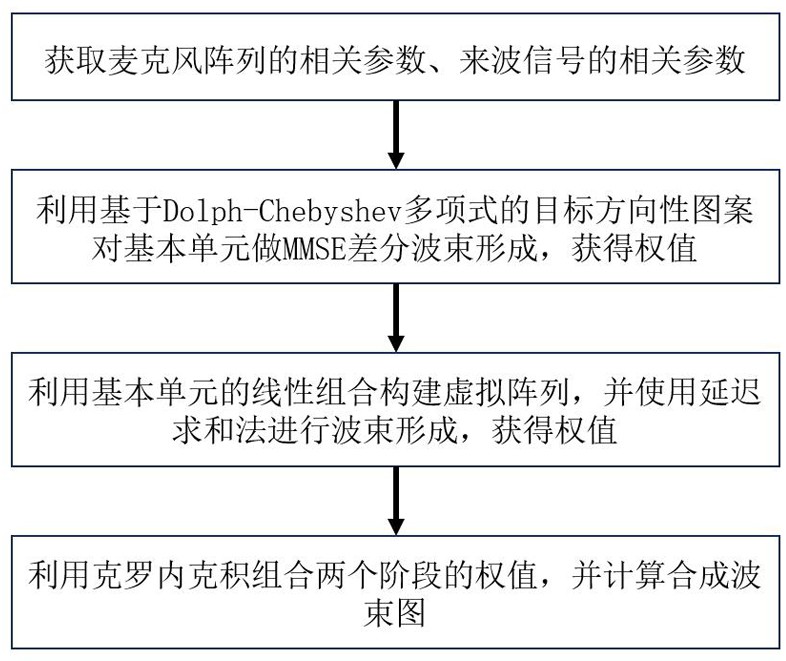
7、进一步地,具体过程包括以下步骤:
8、步骤s1:将差分麦克风阵列视为基本单元,定义一个参考单元后,获取基本单元的个数k、麦克风阵列的阵元数m和基本单元的间距d以及各个阵元离初始单元的距离r和角度φ,获取期望信号的来波方向θs,信号频率f和期望信号波长λ,并计算对应的导向矢量d;
9、步骤s2:确定目标方向性图案,使用基于dolph-chebyshev多项式的线性组合形式构建目标方向性图案;
10、步骤s3:对每个基本单元进行独立的波束形成,所述波束形成的方法为基于dolph-chebyshev多项式的目标方向性图案的mmse法,通过最小化合成波束图和目标方向性图案之间的均方误差得到最优权值h1;
11、步骤s4:利用多个差分麦克风阵列单元的线性组合构建虚拟阵列,计算对应的导向矢量α并对虚拟阵列使用最大化白噪声增益的波束形成方法求得权值h2;
12、步骤s5:对步骤s3和步骤s4得到的权值做克罗內克积,得到全局的波束形成权值,对应的波束图即为基本单元和虚拟阵列的波束图的克罗內克积。
13、进一步地,所述基于dolph-chebyshev多项式的目标方向性图案的具体公式如下:
14、
15、其中:
16、e(θ)=[e-jnθ ... 1 ... ejnθ]t,
17、
18、θ和θs分别为波达方向角和目标方向角,n为差分波束形成阶数,j是虚数单位;ζ′n,k=αη2kζn,k是代数公式,α和η分别是与dolph-chebyshev多项式中旁瓣级和主瓣宽度的大小有关的参数;ζn,k的具体公式如下:
19、
20、进一步地,所述mmse波束形成方法的构建方法为:
21、将波束方向图近似的均方误差mse定义为:
22、其中和分别为n阶差分波束图和合成波束图;其中,*代表共轭转置,<x,y>本身为运算过程的中间参量,无特殊含义,b2n,n代指决定波束图形状的真实因子,且
23、
24、b2n=[b2n,-n ... b2n,0 ... b2n,n]t,
25、pe(θ)=[e-jnθ ... 1 ... ejnθ]t,
26、c2n(θs)=y(θs)b2n
27、=[c2n,-n(θs)...c2n,0(θs)...c2n,n(θs)]t.
28、diag(·)表示对角矩阵。关于线对称,其中θ∈[θs,θs+π]
29、将均方误差mse重新表示为以下二次形式:
30、
31、其中:
32、
33、其中,ψn=(ψ-n,...,ψ0,...,ψn),jn=diag{j-n,...,jn},k为波长的倒数,t是转置符号,jn是n阶贝塞尔函数;矩阵ρ等价于圆柱各向同性噪声场的伪相干矩阵,d(θ)是差分麦克风阵列单元对应的导向矢量;使用拉格朗日乘子法,mmse法的最优解为:
34、hmmse(θs)=ρ-1q(θs)。
35、进一步地,为了使计算波束图时能够控制主瓣宽度和旁瓣级,将目标方向性图案变更为基于dolph-chebyshev多项式的线性组合形式,即:
36、
37、其中是和主瓣宽度以及旁瓣级有关的代数式;获得q(θs)的算式为:
38、
39、其中,下标dc指代的是目标方向性图案。
40、进一步地,所述虚拟阵列定义为一维线性阵列,阵元即基本单元,并使用延迟求和法进行波束形成。
41、进一步地,所述虚拟阵列所使用的最大化白噪声增益波束形成方法为延迟求和法,具体公式如下:
42、
43、其中m是基本单元的个数,ω是角频率,τ(θs)是对应的差分麦克风阵列单元的参考点与第一个差分麦克风阵列单元的参考点之间的时间延迟。
44、进一步地,所述全局波束形成权值公式如下:
45、
46、其中h(ω)和w(ω)分别是差分麦克风阵列单元和虚拟阵列的波束形成权值,是克罗内克积符号,全局波束图公式为两阶段波束图的克罗内克积:
47、
48、进一步地,所述基于dolph-chebyshev多项式的目标方向性图案中,参数α和η允许进行转换,在给定α的情况下,η的值为:
49、
50、给定η的情况下,α的值为:
51、
52、以及,一种基于虚拟阵列的两阶段主瓣宽度可变波束形成装置,其特征在于:以差分麦克风阵列作为基本单元,由多个差分麦克风阵列组成更大阵列的平面差分波束形成器,在根据如上所述的方法,实现波束形成。
53、相比于现有技术,本发明及其优选方案能够在阵元数量相等的情况下获得最小的波束图失真,并且利用了基于dolph-chebyshev多项式的目标方向性图案,在权衡旁瓣级和主瓣宽度的情况下,可以有效缓解低频情况下白噪声增益较低的情况,并且利用克罗内克积实现了进一步的性能提升。
- 还没有人留言评论。精彩留言会获得点赞!