一种水下光通信接收信号检测方法
本技术涉及通信信号检测,尤其涉及一种水下光通信接收信号检测方法。
背景技术:
1、随着海洋资源利用方式的不断革新,以及珍贵资源开发需求的日渐增长,水下通信技术逐渐成为学术和工业研究的焦点。水下无线光通信(underwater wireless opticalcommunication,uwoc)技术更是作为一种数据速率快、延迟低、频带宽、功耗小、保密性良好的通信技术,赢得了科学界、工业界乃至国防领域的广泛关注和重视。但光信号在传输过程中仍面临海水光学特性的挑战,包括吸收、散射以及湍流效应,其会对通信链路和通信质量产生严重干扰。吸收散射造成信号衰减,海洋湍流导致光强闪烁,两者均会使接收信号极其微弱,接收端很难从背景噪声中提取有用信息,从而影响通信系统性能。为了实现远距离通信,必须解决低信噪比情况下的信号检测问题。传统的信号处理方法大多通过抑制噪声来提高信噪比,但在低信噪比的情况下难以获得良好的性能。
2、相关技术中,针对吸收散射导致接收信号强度降低或光束偏离传输方向,一般采用自适应随机共振进行弱光信号检测。但是光信号在水下传输时除了吸收散射,海洋湍流也是一个重要且不可预测的因素,其会导致光强闪烁、信号衰减与畸变,从而造成信号质量降低和通信效率的减弱,此时单纯的采用自适应随机共振弱光信号检测方法效果并不理想。
3、因此,有必要提供一种新的技术方案改善上述方案中存在的一个或者多个问题。
4、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本技术的目的在于提供一种水下光通信接收信号检测方法,进而至少在一定程度上克服由于相关技术的限制和缺陷而导致的一个或者多个问题。
2、根据本技术实施例提供的一种水下光通信接收信号检测方法,该方法包括:
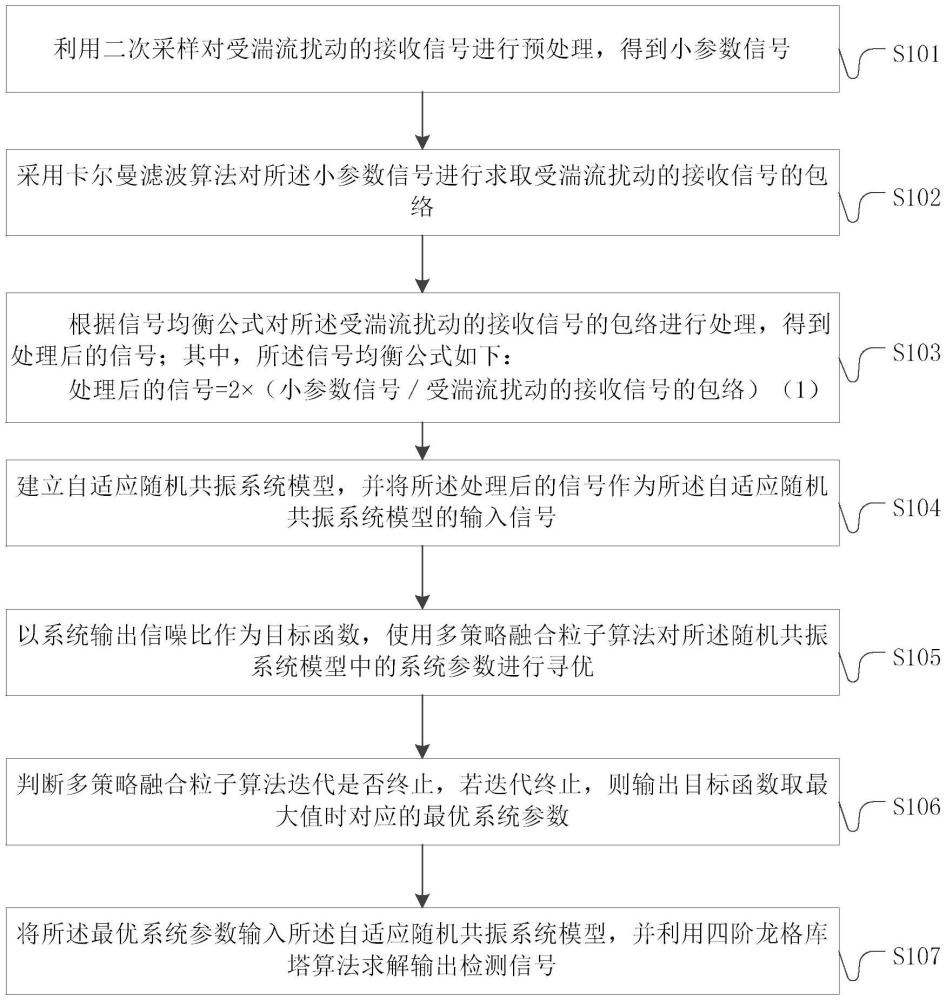
3、利用二次采样对受湍流扰动的接收信号进行预处理,得到小参数信号;
4、采用卡尔曼滤波算法对所述小参数信号进行求取受湍流扰动的接收信号的包络;
5、根据信号均衡公式对所述受湍流扰动的接收信号的包络进行处理,得到处理后的信号;其中,所述信号均衡公式如下:
6、处理后的信号=2×(小参数信号/受湍流扰动的接收信号的包络)(1);
7、建立自适应随机共振系统模型,并将所述处理后的信号作为所述自适应随机共振系统模型的输入信号;
8、以系统输出信噪比作为目标函数,使用多策略融合粒子算法对所述随机共振系统模型中的系统参数进行寻优;
9、判断多策略融合粒子算法迭代是否终止,若迭代终止,则输出目标函数取最大值时对应的最优系统参数;
10、将所述最优系统参数输入所述自适应随机共振系统模型,并利用四阶龙格库塔算法求解输出检测信号。
11、本技术的实施例中,所述采用卡尔曼滤波算法对所述小参数信号进行求取受湍流扰动的接收信号的包络,包括:
12、对所述小参数信号进行提取湍流特征信号,包括:
13、初始化变量r_c和变量s_m,并遍历所述小参数信号中的每个元素,如果当前元素大于s_m,则替换s_m;否则,使用(s_m*r_c)/(r_c+1)更新s_m。
14、本技术的实施例中,所述采用卡尔曼滤波算法对所述小参数信号进行求取受湍流扰动的接收信号的包络,还包括:
15、将所述湍流特征信号作为所述卡尔曼滤波算法初始时刻的目标状态,并初始化滤波器参数、状态转移矩阵、噪声驱动矩阵、观测矩阵、输入系统的噪声序列的协方差、高斯测量噪声序列的协方差。
16、本技术的实施例中,所述采用卡尔曼滤波算法对所述小参数信号进行求取受湍流扰动的接收信号的包络,还包括:
17、利用状态方程计算出k时刻目标状态的预测值、观测信号的预测值以及信息,并计算出k时刻参数预测误差协方差、卡尔曼滤波增益,以及估计误差协方差,进而得到k时刻的参数估计值;
18、其中,状态方程的表达式为:
19、x(k+1)=φx(k)+γw(k) (2);
20、z(k+1)=hx(k+1)+v(k+1) (3);
21、式中,x(k+1)表示k+1时刻的目标状态,z(k+1)表示k+1时刻的观测信号,φ表示状态转移矩阵,γ表示噪声驱动矩阵,h表示观测矩阵,在线性滤波过程中,假设噪声均为高斯白噪声,w(k)表示输入系统的噪声序列,g表示输入系统的噪声序列的协方差,v(k+1)表示斯测量噪声序列,r表示高斯测量噪声序列的协方差;
22、其中,k时刻目标状态的预测值观测信号的预测值以及信息ε(k)的对应表达式分别为:
23、
24、其中,k时刻的参数预测误差协方差p(k|k-1)、卡尔曼滤波增益k(k)以及状态协方差矩阵p(k|k)的对应表达式分别为:
25、p(k|k-1)=φp(k-1|k-1)φt+qk-1 (7);
26、k(k)=p(k|k-1)ht[hp(k|k-1)ht+r]-1 (8);
27、p(k|k)=[in-k(k)h]p(k|k-1) (9);
28、式中,in为单位阵,t表示矩阵的转置;
29、其中,k时刻的参数估计值表达式为:
30、
31、本技术的实施例中,所述采用卡尔曼滤波算法对所述小参数信号进行求取受湍流扰动的接收信号的包络,还包括:
32、根据k时刻的参数估计值,计算出k+1时刻的参数估计值,当满足预设条件k+1大于受湍流扰动的接收信号长度n时,输出经过所述卡尔曼滤波算法处理后的受湍流扰动的接收信号的包络。
33、本技术的实施例中,所述建立自适应随机共振系统模型,包括:
34、使用朗之万方程描述自适应随机共振系统模型,建立信号、噪声、非线性系统三者之间的关系,所述朗之万方程的表达式如下:
35、
36、式中,a、b表示自适应随机共振系统模型的系统参数,x(t)表示自适应随机共振系统模型的系统输出信号,s(t)表示自适应随机共振系统模型的系统输入信号,n(t)表示噪声。
37、本技术的实施例中,所述以系统输出信噪比作为目标函数,使用多策略融合粒子算法对所述随机共振系统模型中的系统参数进行寻优,包括:
38、对多策略融合粒子群算法的参数进行初始化,设定种群数量m,最大迭代次数nitermax,最大惯性权重wmax、最小惯性权重wmin、加速度系数c1、加速度系数c2,连续最优解相同次数imax以及系统参数(a,b)的取值范围;
39、并初始化粒子种群位置xi=(xi1,xi2,...xid)、速度vi=(vi1,vi2,...vid),i=1,2,...,m,判断是否符合预设条件,且每个位置对应一组系统参数,根据所述系统参数计算目标函数值。
40、本技术的实施例中,所述以系统输出信噪比作为目标函数,使用多策略融合粒子算法对所述随机共振系统模型中的系统参数进行寻优,还包括:
41、计算每个粒子适应度fi,将其作为个体最优pi,并把初始种群粒子个体最优作为全局最优pg;
42、更新粒子的速度和位置,包括:
43、产生随机数p∈[0,1],计算邻域搜索半径系数rk,并比较p和rk的大小关系;
44、当p<rk时,计算出新的全局最优位置pl,并按照此条件下的速度、位置公式进行更新;
45、当p≥rk时,继续比较计数器tcount与imax的关系,包括:
46、当tcount≥imax时,计算选择概率pθ;
47、如果(0,1)之间的随机数r<pθ,按照反向学习策略公式更新最优解;
48、否则,按照柯西变异策略公式对最优解进行变异扰动,产生新解;
49、当tcount<imax时,并按照此条件下的速度、位置公式进行更新;
50、其中,rk的表达式为:
51、
52、式中,t表示当前迭代次数;
53、其中,p<rk时对应的pl以及速度、位置更新公式为:
54、pl=pg+(-1)t·rand()·rk (13);
55、
56、vi(t+1)=wvi(t)+c1r1(pi(t)-xi(t))+c2r2(pl-xi(t)) (15);
57、xi(t+1)=xi(t)+vi(t+1) (16);
58、式中,rk表示搜索半径,rk=rk·pg;pg表示全局最优位置;w表示惯性权重;c1、c2分别表示加速度系数,用以对pi(t)和pg(t)加权;r1、r2分别表示[0,1]范围内的两个随机值;pi(t)、pg(t)分别表示第i个粒子在第t次迭代中的个体最优位置以及全局最优位置,rand()表示产生(0,1)之间的随机数;
59、其中,p≥rk且tcount≥imax时对应的反向学习策略公式为:
60、
61、式中,pg′(t)表示第t代最优解的反向解,xmax、xmin分别是位置x的上下界,r是服从(0,1)标准均匀分布的随机数矩阵,b1表示信息交换控制参数,表示异或,xi(t+1)表示第t+1次迭代过程中粒子的位置。
62、其中,p≥rk且tcount≥imax时对应的柯西变异策略公式为:
63、
64、
65、式中,cauchy(0,1)为标准柯西分布,η取值与ζ有关,
66、其中,p≥rk且tcount<imax时对应速度、位置更新公式为:
67、vi(t+1)=wvi(t)+c1r1(pi(t)-xi(t))+c2r2(pg(t)-xi(t)) (22);
68、xi(t+1)=xi(t)+vi(t+1) (23)。
69、本技术的实施例中,所述以系统输出信噪比作为目标函数,使用多策略融合粒子算法对所述随机共振系统模型中的系统参数进行寻优,还包括:
70、评估、更新每个粒子的适应度值,以得到个体历史最优值和全局最优值,包括;
71、计算每个粒子xi的适应度值fi,比较fi与个体历史最优值pi的大小关系,如果fi较优,将其赋值给pi;
72、否则不进行更新;
73、对全局最优值pg进行相应的操作。
74、本技术的实施例中,所述判断多策略融合粒子算法迭代是否终止,若迭代终止,则输出目标函数取最大值时对应的最优系统参数,包括:
75、当目标函数收敛至其最大值,且迭代次数达到所述最大迭代次数时,则停止迭代,并输出所述目标函数取最大值时对应的所述最优系统参数。
76、本技术的实施例提供的技术方案可以包括以下有益效果:
77、本技术的一种实施例中,通过上述方法,使用卡尔曼滤波算法实现接收端受湍流扰动的接收信号的追踪和估计,适应性的估计信道特性,实现信号均衡。然后,再将均衡处理后的信号输入自适应随机共振系统模型,以输出信噪比为目标函数,利用改进后的多策略融合粒子群算法确定自适应随机共振模型的系统参数,实现接收信号检测。本技术实施例可以实现自适应随机共振检测,提升输出信噪比,降低系统误码率,用于对水下光通信接收信号的检测。
78、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!