基于边缘计算的基站勘察方法、系统、电子设备及介质与流程
本公开涉及通信,具体涉及一种基于边缘计算的基站勘察方法,一种基于边缘计算的基站勘察系统,一种电子设备以及一种计算机可读存储介质。
背景技术:
1、目前,基于无人机的通信基站选址勘察系统可替代技术工作人员进行基站勘察,无需勘察人员多次攀爬至备选基站站点,可节省人员抵达备选基站站点的时间,避免恶劣勘察环境带来的安全问题,避免人为疏漏。而且为了进一步提高工作效率,当前勘察系统会在一些方面进行改进:(1)勘察前,利用计算机进行通信环境仿真,然后拟定备选站点,使勘察有的放矢;(2)勘察后,利用计算机对无人机勘察信息进行仿真评估,以减少勘察误差造成的基站改建甚至返工的成本;(3)利用计算机对输入基站安装条件数据、基站选址需求数据、地面定位信息、无人机定位信息、无人机拍摄的全向图等进行综合提取、处理、对比、评估和分析,形成最终勘察报告,以节约勘察分析时间。
2、虽然这些改进提升了勘察决策的效率和准确度。但当前无人机的通信基站选址勘察还存在以下问题:信息采集范围、准确度有限。异地处理勘察信息效率低,现有系统将勘察信息传输到本地计算机,由于勘察信息包含大量高清勘察图像等需要较大存储空间的文件,将勘察信息传输到本地会导致异地处理响应较慢。异地访问内网安全性低,当勘察人员需要异地访问企业内网查询基站基础信息、站址覆盖情况时,现有系统通过虚拟专用网络(virtual private network,vpn)访问企业内网,而vpn访问方式需要绕行公网传输,存在信息暴露风险,而基站基础信息包含站址、经纬度等,属于敏感信息,需要更加安全可靠的传输途径。异地访问内网需要手动切换,操作复杂,当勘察人员需要访问企业内网时,现有系统通过vpn访问企业内网,且无法同时访问公网,如需访问公网,需要从vpn切换回来,操作繁琐复杂。
技术实现思路
1、为了至少解决现有技术中存在的异地处理勘察信息效率低,异地访问内网安全性低,操作繁琐复杂的问题,本公开提供一种基于边缘计算的基站勘察方法、基于边缘计算的基站勘察系统、电子设备以及计算机可读存储介质,基于边缘云存储基站勘察信息,可实现异地处理勘察信息的快速响应;并且通过ulcl(uplinkclassifier,上行分类器)技术可实现勘察人员随时随地访问企业内网进行信息查询,勘查人员可同时访问公网和内网,提高了工作效率。
2、第一方面,本公开提供一种基于边缘计算的基站勘察方法,应用于无人机遥控端,所述方法包括:
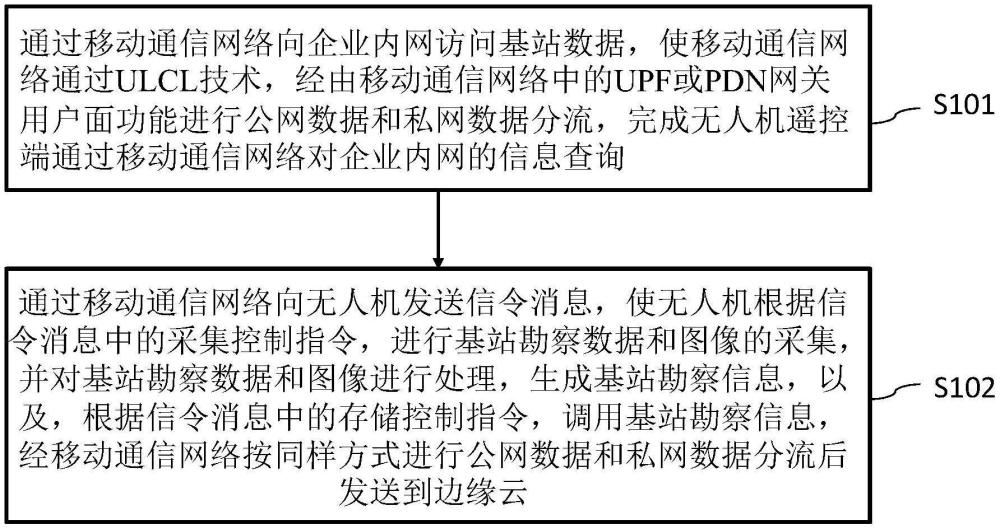
3、通过移动通信网络向企业内网访问基站数据,使移动通信网络通过ulcl技术,经由移动通信网络中的upf(user planefunction,用户平面功能)或pdn(public datanetwork,公用数据网)网关用户面功能进行公网数据和私网数据分流,完成无人机遥控端通过移动通信网络对企业内网的信息查询;
4、通过移动通信网络向无人机发送信令消息,使无人机根据信令消息中的采集控制指令,进行基站勘察数据和图像的采集,并对基站勘察数据和图像进行处理,生成基站勘察信息,以及,根据信令消息中的存储控制指令,调用基站勘察信息,经移动通信网络按同样方式进行公网数据和私网数据分流后发送到边缘云。
5、进一步的,所述进行基站勘察数据和图像的采集包括:
6、通过gps定位无人机所在位置的经纬度;
7、通过激光雷达传感器测量无人机所在位置的高度;
8、采用激光雷达传感器测量无人机与周边遮挡物体间的距离;
9、采用陀螺仪和磁罗盘综合测量方位角,并通过相应的滤波算法计算得到方位角的最优估计值;
10、通过高清摄像头采集基站周边环境勘察图像,并根据测定的方位角,在不同的角度拍摄图片,以采集无人机所在位置对应方向的基站周边环境勘察图像。
11、进一步的,所述对基站勘察数据和图像进行处理,生成基站勘察信息包括:
12、将采集到的高度、位置、方位角、周边障碍物距离信息与在同位置、同方位角采集到的图像进行一一匹配,通过匹配后的勘察数据与图像生成基站勘察信息。
13、进一步的,所述移动通信网络包括4g网络和5g网络;
14、所述通过ulcl技术,经由移动通信网络中的upf或pdn网关用户面功能进行公网数据和私网数据分流,包括:
15、5/4g网络架构将ulcl分流器与主锚点融合设置,辅锚点单独设置,网络基于ip地址感知到用户访问的业务类型,终端基于专用dnn(named data networking,命名数据网络),将私网流量经由主锚点进行ulcl分流到辅锚点,访问企业内网,公网流量经过主锚点upf/pgw(pdn gateway,pdn网关)-u1直接访问。
16、第二方面,本公开提供一种基于边缘计算的基站勘察方法,应用于无人机,所述方法包括:
17、接收无人机遥控端通过移动通信网络向无人机发送的信令消息;
18、根据信令消息中的采集控制指令,进行基站勘察数据和图像的采集;
19、对基站勘察数据和图像进行处理,生成基站勘察信息;以及,
20、根据信令消息中的存储控制指令,调用基站勘察信息,经移动通信网络通过ulcl技术,由移动通信网络中的upf或pdn网关用户面功能进行公网数据和私网数据分流后发送到边缘云。
21、进一步的,所述进行基站勘察数据和图像的采集包括:
22、通过gps定位无人机所在位置的经纬度;
23、通过激光雷达传感器测量无人机所在位置的高度;
24、采用激光雷达传感器测量无人机与周边遮挡物体间的距离;
25、采用陀螺仪和磁罗盘综合测量方位角,并通过相应的滤波算法计算得到方位角的最优估计值;
26、通过高清摄像头采集基站周边环境勘察图像,并根据测定的方位角,在不同的角度拍摄图片,以采集无人机所在位置对应方向的基站周边环境勘察图像。
27、进一步的,所述对基站勘察数据和图像进行处理,生成基站勘察信息包括:
28、将采集到的高度、位置、方位角、周边障碍物距离信息与在同位置、同方位角采集到的图像进行一一匹配,通过匹配后的勘察数据与图像生成基站勘察信息。
29、第三方面,本公开提供一种基于边缘计算的基站勘察系统,所述系统包括无人机遥控端,所述无人机遥控端包括:
30、第一通信模块,其设置为通过移动通信网络向企业内网访问基站数据,使移动通信网络通过ulcl技术,经由移动通信网络中的upf或pdn网关用户面功能进行公网数据和私网数据分流,完成无人机遥控端通过移动通信网络对企业内网的信息查询;以及,
31、通过移动通信网络向无人机发送信令消息,使无人机根据信令消息中的采集控制指令,进行基站勘察数据和图像的采集,并对基站勘察数据和图像进行处理,生成基站勘察信息,以及,根据信令消息中的存储控制指令,调用基站勘察信息,经移动通信网络按同样方式进行公网数据和私网数据分流后发送到边缘云。
32、第四方面,本公开提供一种基于边缘计算的基站勘察系统,所述系统包括无人机,所述无人机包括:
33、第二通信模块,其设置为接收无人机遥控端通过移动通信网络向无人机发送的信令消息;
34、信息采集模块,其设置为根据信令消息中的采集控制指令,进行基站勘察数据和图像的采集;
35、数据处理模块,其设置为对基站勘察数据和图像进行处理,生成基站勘察信息;以及,
36、所述第二通信模块还设置为根据信令消息中的存储控制指令,调用基站勘察信息,经移动通信网络通过ulcl技术,由移动通信网络中的upf或pdn网关用户面功能进行公网数据和私网数据分流后发送到边缘云。
37、第五方面,本公开提供一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,当所述处理器运行所述存储器存储的计算机程序时,所述处理器执行如第一方面和第二方面中任一所述的基于边缘计算的基站勘察方法。
38、第六方面,本公开提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面和第二方面中任一所述的基于边缘计算的基站勘察方法。
39、有益效果:
40、本公开提供的基于边缘计算的基站勘察方法、基于边缘计算的基站勘察系统、电子设备及存储介质,基于边缘云存储基站勘察信息,可实现异地处理勘察信息的快速响应,提高工作效率;并且通过ulcl进行网络分流,可实现勘察人员通过移动通信网络随时随地访问企业内网进行信息查询,便于做出选址决策,并将勘察信息通过移动通信网络传输至内网边缘云,数据直接在本地卸载,无需绕行互联网,提升了信息传输的隔离度和安全性,勘查人员可同时访问公网和内网,提高了工作效率。
- 还没有人留言评论。精彩留言会获得点赞!