一种用于无人机航拍的图像压缩方法及装置与流程
本发明涉及图像数据处理领域,尤其涉及一种用于无人机航拍的图像压缩方法及装置。
背景技术:
1、随着无人机技术的迅速发展,无人机在各行各业中的应用不断增加。无人机航拍已经成为许多领域中获取高质量图像和数据的重要方式,如农业、地理测绘、环境检测等。但是,由于无人机传感器获取到的数据量庞大,对数据传输和存储提出了挑战,因此需要高效的图像压缩方法来减小数据大小。无人机航拍图像常用超像素分割方法进行图像压缩,超像素分割是一种图像处理技术,它将图像分割成具有相似特征的区域,从而减少图像中的冗余信息,提高压缩效率。
2、公开号为cn106384354a的专利申请文件公开了基于slic算法的超像素分割方法,针对已有的slic超像素分割方法,将多个波段的图像转换成xyz三刺激色,再转换到cielab色彩空间,对原有的slic方法进行推广,实现了在多个波段图像下的超像素分割方法,为高分辨率、多波段图像的后续处理提供了有效的预处理手段。
3、然而,超像素分割方法中种子点在搜索与其相似的像素点时,每一个种子点的搜索范围是固定的。固定的搜索范围可能无法充分考虑图像局部细节和特征,导致在某些区域中产生过度分割或者欠分割的问题。同时,图像中某些背景区域的纹理信息与前景区域信息会较为相似,所以采用一致的搜索范围也无法考虑到图像中的每一个种子点区域的重要性,会影响超像素分割算法的准确性和鲁棒性,使得无人机航拍的图像压缩后的数据准确性降低。
技术实现思路
1、为了解决一致的搜索范围无法考虑到图像中的每个种子点的重要性,而影响超像素分割算法的准确性和鲁棒性,使得无人机航拍的图像压缩后的数据准确性降低的问题,本发明提供一种用于无人机航拍的图像压缩方法及装置。
2、第一方面,本发明提供一种用于无人机航拍的图像压缩方法,采用如下的技术方案:
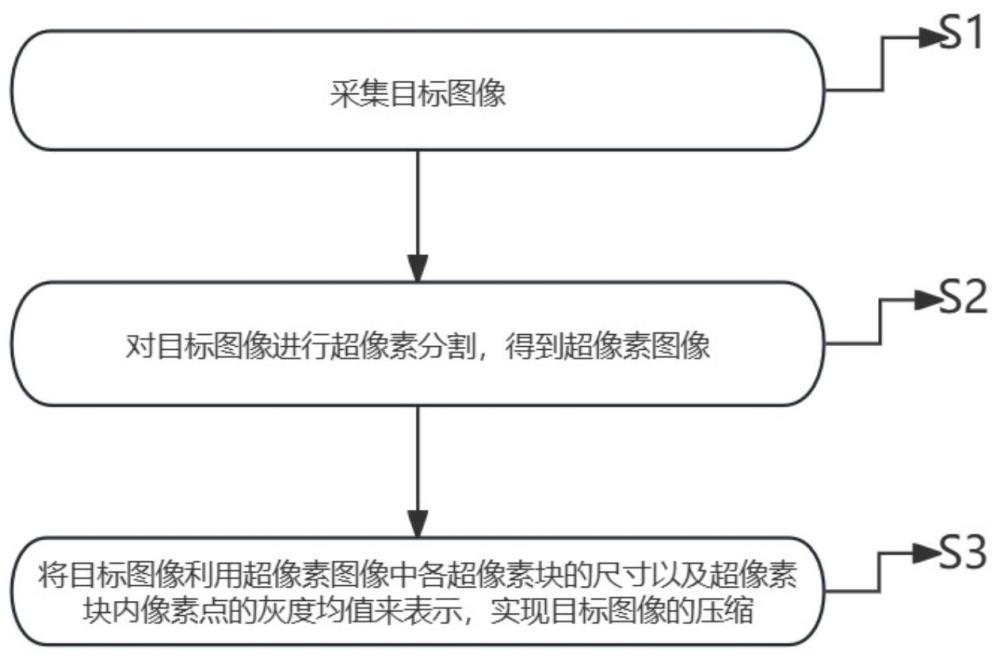
3、将无人机采集到的任意一帧作为目标图像,对目标图像进行超像素分割,得到超像素图像,将目标图像利用超像素图像中各超像素块内像素点的灰度均值以及超像素块的边界像素点来表示,实现目标图像的压缩;在超像素分割的每轮迭代过程中,确定种子点的目标搜索范围,包括:将超像素块中的灰度值中位数和均值之差与灰度值极差的乘积作为该超像素块的纹理密集程度;根据超像素块的纹理密集程度与其余每个超像素块的纹理密集程度之间的差值绝对值确定该超像素块的初级重要性,所述初级重要性与所述差值绝对值正相关;确定种子点的重要性,种子点的重要性满足:;式中,表示目标图像中第n个超像素块的种子点的重要性,表示目标图像中第n个超像素块的初级重要性,表示目标图像中第n个超像素块中像素点的数量,表示对与目标图像相邻的帧图像进行分析,与表示目标图像中第n个超像素块的第x个像素点在第y帧图像与第y+1帧图像中对应位置像素点的灰度值,表示目标图像中第n个超像素块在帧内的第m帧的灰度值信息熵值,表示方差函数,m表示总帧数;根据种子点的重要性对种子点的初始搜索范围进行优化,得到种子点的目标搜索范围,目标搜索范围的边长与种子点的重要性呈负相关;根据各种子点的目标搜索范围进行本轮超像素分割。
4、根据超像素块的纹理密集程度动态调整种子点的搜索范围,能够在保持图像关键细节的同时,减少对平滑区域的过度细分,提高了压缩效率和图像质量的平衡;通过结合超像素块的纹理密集程度与灰度差异,动态确定种子点的重要性,确保了对图像中细节丰富区域的更精确处理,保留了更多有用信息,降低了因压缩带来的信息损失;根据种子点的重要性自适应调整目标搜索范围,使得在图像复杂区域的分割更加精细,而在较简单区域则减少不必要的分割,既保证了分割的准确性,又提高了处理速度;通过智能调整种子点搜索范围,避免了对全图的同等处理,减少了不必要的计算,提升了算法在不同图像内容和质量下的适应性和处理效率,尤其适合于资源有限的无人机平台;最终通过超像素分割技术,将图像划分为具有相似颜色和纹理的区域,仅用较少的超像素块的尺寸和灰度均值来代表原图,大幅减少了图像数据量,实现了高效的图像压缩,适用于无人机航拍图像的快速传输和存储。
5、进一步地,所述超像素块的初级重要性满足如下关系式;;式中,表示目标图像中第n个超像素块的初级重要性,表示目标图像中第n个超像素块的种子点以外的种子点数量,表示目标图像中第n个超像素块的纹理密集程度,表示目标图像中第n个超像素块以外的第u个超像素块的纹理密集程度。
6、通过计算任意种子点与图像中其他所有种子点纹理密集程度的差异之和来确定该种子点的初级重要性,实现了对各区域特征显著性的量化比较,优化了后续处理中对关键区域的选择与关注度,提升了图像分析的针对性和效率。
7、进一步地,所述目标搜索范围的边长满足如下关系式:;式中,表示目标图像中第n个超像素块的种子点的目标搜索范围的边长,表示目标图像中第n个超像素块的种子点的重要性,表示种子点的初始搜索范围的边长,表示向下取整函数。
8、通过将种子点的重要性映射为指数衰减函数来动态调整搜索范围边长,实现了对关键区域更精细的聚焦或非关键区域的适当放宽,优化了超像素分割的精度与效率,提升了图像压缩处理的适应性和资源利用率。
9、进一步地,所述进行本轮超像素分割,还包括:根据超像素块内各像素点与相邻多帧图像中对应像素点的灰度差异,以及超像素块的初级重要性,确定该像素点的重要性;响应于超像素块中像素点的重要性均值大于预设的优化阈值,对超像素块不进行本轮超像素分割;响应于超像素块中像素点的重要性均值不大于预设的优化阈值,在种子点的目标搜索范围内,当某一像素点与多个种子点所属的超像素块的相似度均大于预设的合并阈值时,将该像素点与所述相似度最大的超像素块合并,所述相似度与超像素块和该超像素块的种子点的目标搜索范围内的像素点的灰度差异负相关。
10、通过考虑时间序列灰度变化及超像素块的初级重要性,动态调整分割策略,既保证了动态场景中关键细节的保留,又通过合并减少了不必要的分割处理,实现了图像压缩处理中对复杂度与质量的平衡,显著提升了处理速度与图像质量。
11、进一步地,所述相似度满足如下关系式:;式中,表示目标图像中第n个超像素块的种子点的目标搜索范围内的第i个像素点与第n个超像素块间的相似度,表示目标图像中第n个超像素块的种子点的目标搜索范围内的第i个像素点的灰度值,表示目标图像中第n个超像素块内像素点的灰度均值,表示目标图像中第n个超像素块的种子点的目标搜索范围内的第i个像素点与种子点之间的欧氏距离。
12、进一步地,实现目标图像的压缩后,还包括:
13、将目标图像的超像素图像中各超像素块内像素点的灰度均值构成一个序列,利用无损压缩算法对该序列进行二次压缩。
14、第二方面,本发明提供一种用于无人机航拍的图像压缩装置,采用如下的技术方案:
15、一种用于无人机航拍的图像压缩装置,包括:处理器和存储器,所述存储器存储有计算机程序指令,当所述计算机程序指令被所述处理器执行时实现上述一种用于无人机航拍的图像压缩方法。
16、通过采用上述技术方案,将上述的一种用于无人机航拍的图像压缩方法生成计算机程序,并存储于存储器中,以被处理器加载并执行,从而根据存储器及处理器制作终端设备,方便使用。
17、本发明具有以下技术效果:
18、本发明通过对每个种子点的灰度数据进行分析,可以更准确地确定区域边界,实现更精细的图像分割;再结合相邻多帧的连续变化程度分析帮助调整种子点的搜索范围,使得算法能够更好地适应不同场景下的图像变化,提高分割的鲁棒性和准确性;目标搜索范围可以减少算法处理的计算量,提高处理速度,使得算法更适用于实时或大规模图像处理任务;同时目标搜索范围可以避免在复杂背景下出现过分割或欠分割的情况,提高分割结果的准确性,进而使得无人机航拍的图像压缩后的数据损失程度低,从而准确性更高。
- 还没有人留言评论。精彩留言会获得点赞!