一种面向海上风电巡检的无人机任务卸载方法
本发明涉及无人机通讯和边缘计算,更具体地,涉及一种面向海上风电巡检的无人机任务卸载方法。
背景技术:
1、随着对环境保护和气候变化的关注不断增加,可再生能源的利用越来越受到重视。风能作为一种广泛分布、无污染的可再生资源,成为了我国推动能源转型的重要选择之一。而由于在海上具有更丰富稳定的风能以及能够避免土地资源浪费,海上风电在近年来更是我国大力发展的产业。海上风电是指在海洋中建设风力发电机组,利用海上的风能来发电。这项清洁能源技术在全球范围内得到了广泛的关注和应用,有着多方面的应用背景和优势。在海上风电领域,风力发电机组的运行状态需要进行定期的巡检和维护,以确保其安全可靠地运行。然而,由于海上环境的不确定性,传统的人工巡检不仅费时费力,还存在一定的安全风险。为了提高效率、降低成本并减少安全风险,无人机技术被广泛应用于海上风电巡检。而对于利用无人机进行巡检,就必须考虑到无人机巡检的时延最小化,以保证数据的及时性。并且,无人机对于数据的处理能力有限,通常需要把巡检所得的计算任务卸载到边缘服务器上进行处理。
2、现有的关于无人机巡检的文献,有许多是无人机对陆上建筑物的巡检,包括但不限于陆上风电场、桥梁等建筑物,对于海上风电场的巡检文献较少。这些文献中只是单方面的考虑无人机在巡检过程中的路径规划问题,或者单方面的考虑无人机巡检之后通讯的最小化时延方法,并没有综合考虑多方面。而对于海上风电无人机巡检,考虑海风的影响可以降低无人机飞行能耗,从而提高无人机巡检的效率。同时,由于无人机计算能力有限,需要将无人机上的计算任务卸载到边缘服务器上,而在边缘服务器上考虑分配虚拟机对多无人机卸载的任务进行处理能大大提高处理的效率,从而降低整个系统的时延。
技术实现思路
1、本发明为克服上述现有技术所述的至少一种缺陷,提供一种面向海上风电巡检的无人机任务卸载方法。
2、本发明旨在至少在一定程度上解决上述技术问题。
3、为解决上述技术问题,本发明的技术方案如下:
4、一种面向海上风电巡检的无人机任务卸载方法,包括以下步骤:
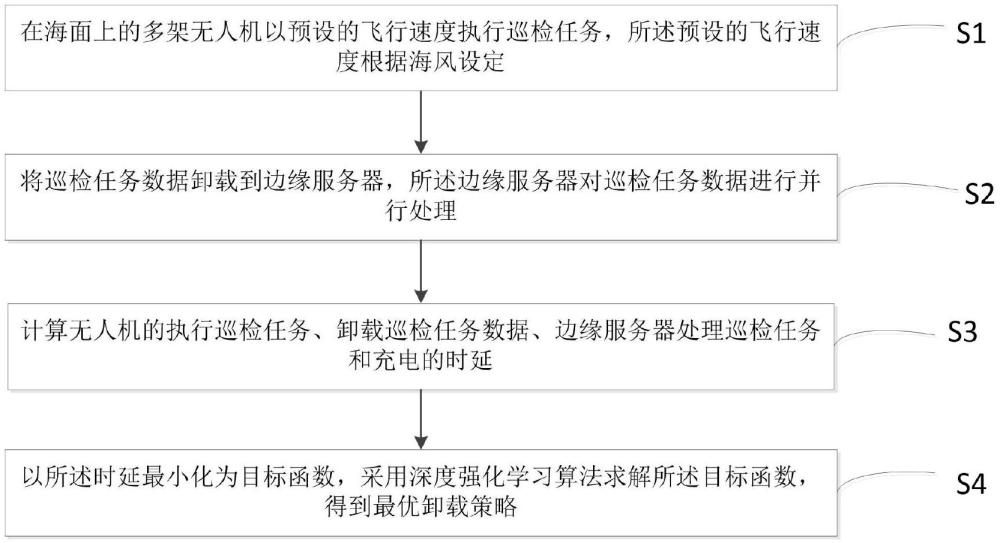
5、s1:在海面上的多架无人机以预设的飞行速度执行巡检任务,所述预设的飞行速度根据海风设定;
6、s2:将巡检任务数据卸载到边缘服务器,所述边缘服务器对巡检任务数据进行并行处理;
7、s3:计算无人机的执行巡检任务、卸载巡检任务数据、边缘服务器处理巡检任务和充电的时延;
8、s4:以所述时延最小化为目标函数,采用深度强化学习算法求解所述目标函数,得到最优卸载策略。
9、进一步,步骤s1中,所述预设的飞行速度根据海风设定,包括:
10、
11、式中,vg为无人机的地速,vw为风速,α为风向,vuav为无人机的实际速度,β为航向偏差角,α为风向,vw为风速。
12、进一步,步骤s4中,所述以时延最小化为目标函数,采用深度强化学习算法求解目标函数,包括:
13、
14、s.t.
15、q0=l[0]=l[t],
16、
17、vuav≤vmax,
18、0≤f(n)≤fmax,
19、
20、c[t]+doffload[m]≤cmax,
21、e1[m]+e2[m]+e3[m]≤euav
22、式中,t1[m]为第m架次的巡检时间,t2为第m架次无人机计算任务卸载的时间,tch[m]为第m架次无人机的充电时间,t3[m]为边缘服务器处理巡检任务的时间,k为待巡检的风力发电机,k[m]为无人机第m个架次巡检完的风力发电机,e1[m]为无人机完成一个架次的巡检能耗,e2[m]为第m架次无人机计算任务卸载过程的能耗,e3[m]为边缘服务器上计算的总能耗,ddetect[m]为巡检所得的任务数据,dlocal[m]为无人机完成第m架次的巡检后本地计算的数据大小,po为无人机与边缘服务器的通讯功率,是无人机与边缘服务器通信的最大功率,bm为二元变量,vuav为无人机的飞行速度,vmax为无人机的最大速度,f(n)为cpu频率,fmax为cpu频率的上限,c[t]为缓存空间在t时刻的已缓存的数据大小,cmax为边缘服务器上缓存空间的最大缓存容量。
23、进一步,计算所述第m架次的巡检时间,包括:
24、t1[m]=tf[m]+k[m]td
25、tf[m]为一个架次无人机飞行时间,k[m]为风力发电机数量,td为巡检一个风力发电机的时间。
26、进一步,计算所述无人机计算任务卸载的时间,包括:
27、当无人机检测到边缘服务器上缓存空间不足以卸载数据,无人机等待以卸载数据,存在等待的时延t2,等待时延主要取决于前面等待的无人机数量以及需要的缓存空间大小
28、t2=max{toffload[m]}+twait
29、
30、toffload[m]为第m架次所检测到数据卸载所需要的时间,twait为总的等待时间,twait[m]为第m架次等待时间,μ为边缘服务器从缓存空间中读取数据的速度,roffload为无人机向缓存空间卸载计算任务的速率,doffload[m]为数据总量。
31、进一步,步骤s2中,所述将巡检任务数据卸载到边缘服务器前还包括判断是否将巡检任务数据卸载到边缘服务器:预先设置阈值,判断无人机的决策优先级是否超过阈值,当决策优先级超过所述阈值时,无人机将继续巡检,当决策优先级不超过阈值时,则无人机将巡检任务数据卸载到边缘服务器,所述决策优先级计算包括:
32、
33、euse为无人机在巡检过程中所使用的电量,ω1第一权重率,ω2是第二权重率,w(m)为决策优先级,ddetect[m]为无人机上的巡检任务数据大小,dmax为无人机最大算力,euav为无人机电量;
34、a=ebase+edynamic-ework
35、ework为根据任务数据需求调整的电量百分比,ebase为无人机基础电量,edynamic为动态电量,a为阈值。
36、进一步,计算所述无人机的充电时间,包括:
37、
38、euav为无人机的电池容量,pcharge为无人机充电的功率,tch[m]为无人机充电时间。
39、进一步,计算所述边缘服务器处理第m架次的计算时间,包括:
40、t3=tlocal+tedge
41、tedge为边缘服务器上的计算时间,tlocal为无人机本地计算的时间。
42、进一步,计算所述无人机在第m架次卸载到边缘服务器部分的数据大小,包括:
43、
44、ddetect[m]为巡检所得的任务数据,bm为边缘服务器的二元变量,为无人机本地计算的最大数据能力。
45、进一步,步骤s2中,所述边缘服务器对巡检任务数据进行并行处理,包括:
46、所述边缘服务器将分配多个虚拟机对缓存空间中的多个巡检任务数据进行并行处理,边缘服务器根据无人机的巡检任务数据为多台虚拟机分配计算资源,
47、假设一个卸载到边缘服务器上的任务对应一台虚拟机来计算处理,并且边缘服务器根据无人机第m架次卸载的任务为每一台虚拟机分配计算资源,则虚拟机的处理任务时间为tedge[m],
48、
49、p[m]为虚拟机的计算能力
50、把每一台虚拟机上原本所需要完成的任务切片并把多出来的部分放到边缘服务器空闲的地方进行处理,边缘服务器上的计算时间tedge为:
51、
52、与现有技术相比,本发明技术方案的有益效果是:
53、本发明通过将时延最小化作为目标函数,通过安排边缘服务器的虚拟机数量以及巡检架次,从而提高处理的效率,降低时延,还考虑了海上海风对无人机飞行的影响,通过结合海风的风速和角度,得出无人机飞行的实际角度和实际速度,提供一个安全高效的巡检路径。
- 还没有人留言评论。精彩留言会获得点赞!