基于视觉辅助的车联网毫米波无线通信波束对准方法
本发明涉及波束对准,具体为基于视觉辅助的车联网毫米波无线通信波束对准方法。
背景技术:
1、毫米波通信在车联网中具有显著的优势;首先,它能够支持极高的数据传输速率,利用宽带宽可以实现gbps级别的数据交换,满足自动驾驶和高清视频传输的需求。同时,毫米波通信的低延迟特性对于车联网中需要实时响应的应用至关重要,如碰撞预警和协同驾驶。此外,毫米波的短波长使其具备高精度的定位能力,有助于车车通信(v2v)中的安全性提升。通过大规模mimo技术,毫米波还能够支持海量设备的连接,保证车联网中大量车辆、基础设施与行人设备的顺畅通信。
2、然而,由于毫米波的传播特性,车联网应用中必须借助波束赋型技术来克服其高路径损耗、易受障碍物影响等挑战。波束赋形能够集中信号能量,补偿传播中的高损耗,延长通信距离。此外,它可以动态调整波束方向,确保车辆在高速移动时仍能保持稳定连接,同时有效规避环境中的障碍物。通过减少信号间的干扰和提高频谱利用率,波束赋型技术还能支持车联网中的高密度设备连接,保证网络容量和覆盖范围,从而确保车联网中的毫米波通信系统高效可靠地运行。
3、然而在现今城市复杂环境下高移动性的车辆与固定基站之间的通信传输,导频消耗大,无法精准实现毫米波波束对准,影响基站和车辆间的数据传输质量,不利于城市环境下车辆在行驶中获得高质量的通信服务。
技术实现思路
1、针对现有技术存在的不足,本发明目的是提供基于视觉辅助的车联网毫米波无线通信波束对准方法,可以解决现有的问题。
2、为了实现上述目的,本发明是技术方案如下:
3、本发明是通过如下的技术方案来实现:基于视觉辅助的车联网毫米波无线通信波束对准方法,包括以下步骤:
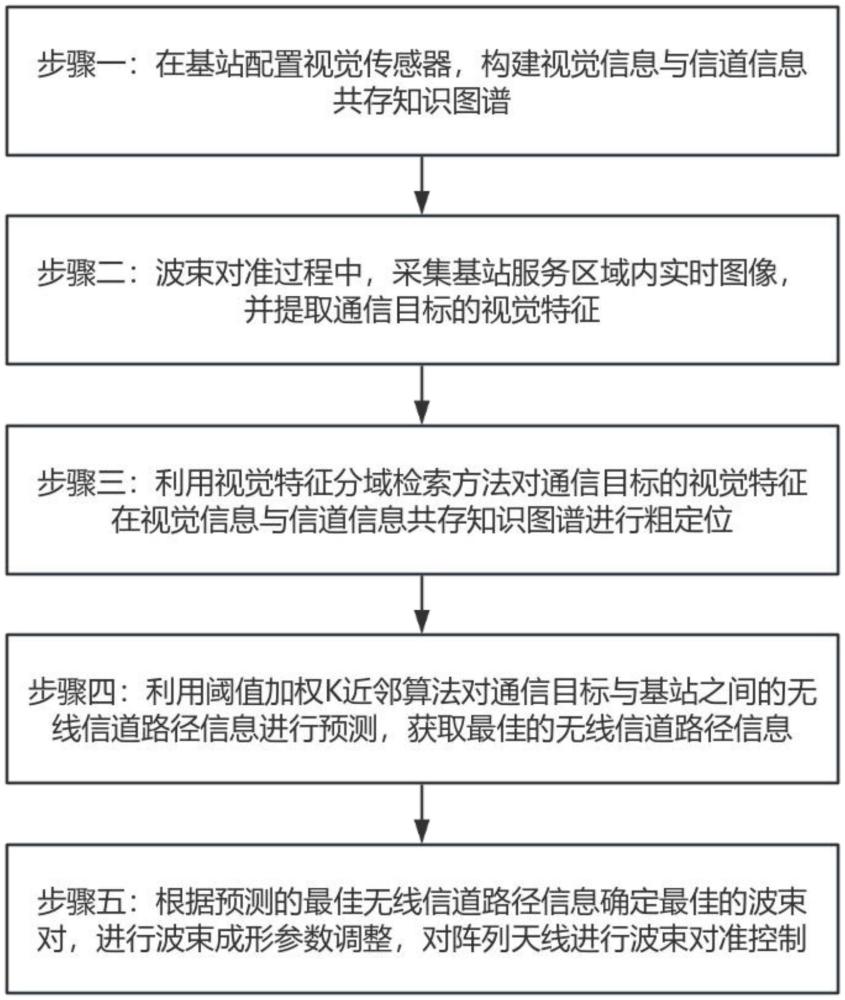
4、步骤一:在基站配置视觉传感器,构建视觉信息与信道信息共存知识图谱;
5、步骤二:波束对准过程中,采集基站服务区域内实时图像,并提取通信目标的视觉特征;
6、步骤三:利用视觉特征分域检索方法对通信目标的视觉特征在所述视觉信息与信道信息共存知识图谱进行粗定位;
7、步骤四:利用阈值加权k近邻算法对通信目标与基站之间的无线信道路径信息进行预测,获取最佳的无线信道路径信息;
8、步骤五:根据预测的最佳无线信道路径信息确定最佳的波束对,进行波束成形参数调整,对阵列天线进行波束对准控制。
9、进一步的,所述在基站配置视觉传感器,构建视觉信息与信道信息共存知识图谱,包括:
10、1.2、对各个基站配置视觉传感器,同步采集基站服务区内的视觉信息以及无线射频信息;
11、1.2、在所述视觉信息以及无线射频信息内提取无线信道特征和视觉特征;
12、1.3、针对基站服务器内的每一个潜在的通信站点建立无线通信和视觉共存的特征指纹;
13、1.4、基于各个通信站点的特征指纹构建视觉信息与信道信息共存知识图谱。
14、进一步的,所述同步采集基站服务区内的视觉信息以及无线射频信息,包括:
15、将车联网环境中基站视觉传感器所采集的图像进行分割,每个分割网格成为数据采集站点;采用仿真或者实测的方式在每一个采集站点同步采集视觉信息和无线射频信息;
16、利用视觉传感器在基站服务区内拍摄的任意一张图像i(t)尺寸为wi×hi,经过降采样生成二维特征图向量ho和wo与输入图像的数学关系表示为:
17、
18、其中strideh和stridew是降采样步长,ho和wo为一个网格的长和宽,每个网格成为数据采集站点;采集视觉信息以及无线射频信息。
19、进一步的,所述视觉特征提取包括提取5个指标(liou,lx,ly,w,h),其中liou表示边界框的置信度,(lx,ly)表示边界框的中心点相较于网格左上角点的偏移量,(w,h)表示边界框的宽和高。
20、进一步的,所述无线信道特征提取包括提取无线信道路径的路径增益,相位,出发角和到达角。
21、进一步的,所述利用视觉特征分域检索方法对通信目标的视觉特征在所述视觉信息与信道信息共存知识图谱进行粗定位,包括:
22、对视觉信道路径图谱进行像素级别分割,得到多个一级子知识图谱,再对一级子知识图谱进行分割,得到每个一级子知识图谱的二级子知识图谱,以此类推得到n级子知识图谱;每次检索先确定通信目标属于某一级子知识图谱,再在二级子知识图谱中继续检测,以此类推,直至找到通信目标所属最终n级子知识图谱。
23、进一步的,所述利用视觉特征分域检索方法的核心思想是递归地将数据集分割成子集,直到满足某种停止条件;其中:
24、构建阶段:
25、选择子知识图谱视觉特征中心点,对于一个节点的点集x,选择该点集的质心c作为子域中心:
26、
27、其中n是该节点包含的点的数量,xi是该节点中的点;
28、计算子知识图谱视觉特征子域半径r,使得该子域能够包含该节点中的所有点:
29、
30、其中||x-c||是点x到球心c的距离;
31、递归划分点集,直到每个节点包含少于预设阈值的点;划分方式是找到数据集中两点之间的最大距离,然后将点集划分为两部分,分别递归地建立子节点;
32、搜索阶段:
33、给定一个查询点q,通过遍历视觉信道知识图谱来寻找最近的邻居;搜索过程的步骤如下:
34、对每个节点计算查询点q与球体中心c的距离:
35、d(q,c)=||q-c|| (4)
36、使用三角不等式加速搜索:
37、d(q,xi)≥d(q,c)-r (5)
38、其中,d(q,xi)为查询点与球体内某点xi之间的距离,d(q,c)为查询点与球体中心之间的距离,r为球体半径。
39、进一步的,所述最佳的无线信道路径预测过程,对于通信目标视觉特征预测使用欧几里得距离作为度量,计算中心坐标的距离;具体为:
40、
41、其中,lx,y为查询图像的图像特征描述符,为视觉信道知识图谱中第i个相机对应图像中第j个图像特征描述符;
42、针对候选对象,计算具有k最近距离的候选视觉特征向量,候选视觉特征向量的总数为k;k是预设值,加入阈值筛选策略,剔除异常值;所以候选视觉特征向量集小于等于k;候选视觉特征向量距离表示为(q=[1,2,3,...,n],n≤k);采用加权平均法预测最终的信道信息;每个候选视觉特征向量与查询点之间的距离不同,距离越近影响越大;因此为每个候选视觉特征向量分配一个权重,这个权重与候选视觉特征向量到查询点的距离成反比,距离越小,权重越大;对权重进行归一化,从而得到每个候选视觉特征向量的权重,即
43、
44、预测的信道信息是候选视觉特征向量信道信息的加权和:
45、
46、pij是第i个候选视觉特征向量的信道信息;最终得到输入图像的无线信道路径信息。
47、一种基于视觉辅助的车联网毫米波无线通信波束对准装置,包括处理器以及存储器;所述存储器用于存储程序;所述处理器执行所述程序实现如上述任一项所述的方法。
48、一种计算机可读存储介质,其特征在于:所述存储介质存储有程序,所述程序被处理器执行实现如上述所述的方法。
49、与现有技术相比,本发明的有益效果包括:
50、本发明在波束对准的过程中,基站首先实时采集服务区域的图像,提取通信目标的视觉特征;然后,利用视觉特征分域检索方法在视觉信道路径图谱中对目标进行初步定位;接下来,通过阈值加权k近邻算法预测通信目标与基站之间的信道路径信息。最终,确定最佳波束对,并调整波束对准参数,控制天线阵列,实现波束成形控制,确保通信的准确性和高效性。
51、本发明以用于城市复杂环境下具有高移动性的车辆与固定基站之间的通信传输,该方法在有效减少导频消耗的同时,能精准实现毫米波波束对准,提高基站和车辆间的数据传输质量,有利于城市环境下车辆在行驶中获得高质量的通信服务,也有利于城市交通通信网络的安全稳定运行。
- 还没有人留言评论。精彩留言会获得点赞!