一种工业相机采集的处理方法与流程
本发明涉及视觉检测,具体为一种工业相机采集的处理方法。
背景技术:
1、生产企业的自动化生产线的普及,自动化生产线生产速度的提升,其机器视觉的在线检测技术作为自动化生产线的重中之重,进行改进升级用于适应其自动化生产线生产速度。
2、目前,自动化生产线普遍运用的机器视觉的在线检测技术为工业相机对自动化生产线生产的流动产品进行检测,通过使用编码器连接传送带的驱动轴,产品的移动速度可认为和驱动轴带动的传送带是同速,编码器可判断转动轴的转动速度和位置,因此,可通过判断驱动轴带的周长和转速来判断驱动轴转动圈传送带的运行距离和速度,编码器会转动产生向工业相机输出的电脉冲信号,进而控制工业的采集成像。
3、而传统工业相机在低光环境下采集图像的噪声增多、细节丢失和对比度低的问题,且传统方法多采用单帧图像进行处理,缺乏对多帧信息的综合利用,无法有效利用时间序列中的信息进行图像增强和降噪,此外,现有的工业相机曝光控制方式多为静态设置,无法实时响应环境光变化,导致图像易曝光或过度曝光的问题,继而影响图像质量,导致无法准确检测和识别目标物体,同时,传统工业相机的光学元件设置通常是固定的或手动调整的,缺乏自动调节机制,影响图像采集的效果。
4、因此,本领域技术人员提供一种工业相机采集的处理方法,以解决上述背景技术中提出的问题。
技术实现思路
1、针对现有技术的不足,本发明提供一种工业相机采集的处理方法,以解决上述背景技术中提出的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种工业相机采集的处理方法,包括如下步骤:
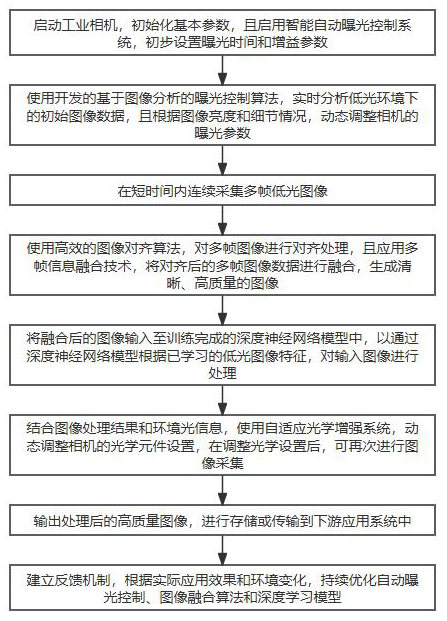
3、步骤1、启动工业相机,初始化基本参数,且启用智能自动曝光控制系统,初步设置曝光时间和增益参数;
4、步骤2、使用开发的基于图像分析的曝光控制算法,实时分析低光环境下的初始图像数据,且根据图像亮度和细节情况,动态调整相机的曝光参数;
5、步骤3、在短时间内连续采集多帧低光图像;
6、步骤4、使用高效的图像对齐算法,对多帧图像进行对齐处理,且应用多帧信息融合技术,将对齐后的多帧图像数据进行融合,生成清晰、高质量的图像;
7、步骤5、将融合后的图像输入至训练完成的深度神经网络模型中,以通过深度神经网络模型根据已学习的低光图像特征,对输入图像进行处理;
8、步骤6、结合图像处理结果和环境光信息,使用自适应光学增强系统,动态调整相机的光学元件设置,在调整光学设置后,可再次进行图像采集;
9、步骤7、输出处理后的高质量图像,进行存储或传输到下游应用系统中;
10、步骤8、建立反馈机制,根据实际应用效果和环境变化,持续优化自动曝光控制、图像融合算法和深度学习模型。
11、优选的,所述步骤1中,所述智能自动曝光控制系统是基于图像分析和机器学习的技术,用于优化工业相机在低光环境下的曝光参数,该系统实时分析捕获的图像数据,动态调整曝光时间和增益设置;
12、所述智能自动曝光控制系统包括图像采集模块、图像分析模块、曝光控制模块、反馈机制;所述图像采集模块负责捕获初始图像,提供实时图像数据供分析;所述图像分析模块利用图像处理算法实时分析图像的亮度、对比度和细节特征;所述曝光控制模块根据图像分析结果,调整相机的曝光时间和增益参数;所述反馈机制持续监控图像质量,调整曝光参数应对环境光变化。
13、优选的,所述智能自动曝光控制系统中,通过加权平均法计算图像的平均亮度值,其加权平均法公式:
14、,
15、其中,,,依次表示图像第i个像素的红、绿、蓝分量,n 表示图像中的总像素数;
16、所述智能自动曝光控制系统中,通过曝光误差评价函数来计算曝光误差,其算法公式:
17、,
18、其中,图像亮度,目标亮度;
19、所述智能自动曝光控制系统中,根据曝光误差动态调整曝光时间t和增益,其算法公式:
20、,
21、,
22、其中,和是控制参数,调节系统对曝光误差的响应速度。
23、优选的,所述步骤4中,通过曝光控制算法对图像对齐后,要将多帧图像融合,图像融合包括加权平均融合和噪声抑制融合;
24、所述加权平均融合是对各帧图像的像素值根据其权重进行加权平均,其算法公式:
25、,
26、其中,融合后的图像像素值,是第i帧图像的像素值,是对应的权重,n是帧数;
27、所述噪声抑制融合通过计算像素值的中值或使用滤波器抑制噪声,其算法公式:
28、,
29、,
30、其中,是滤波权重。
31、优选的,所述步骤5中,深度学习模型的具体实施算法步骤如下:
32、第一步、图像预处理输入图像进行标准化:
33、,
34、其中,μ和σ为图像的均值和标准差;
35、第二步、卷积层用于提取图像特征:
36、,
37、其中,为第l层的特征映射,和为第l层的权重和偏置,表示卷积操作;
38、第三步、池化层用于减少特征图的尺寸,且保留特征:
39、,
40、其中,表示最大池化操作;
41、第四步、图像增强层对特征进行处理,生成增强后的图像:
42、,
43、其中,e为增强后的图像,和为增强层的权重和偏置,为输出层的激活函数;
44、第五步、在训练过程中,使用损失函数来衡量模型输出与目标增强图像间的差异:
45、,
46、其中,n为图像像素总数,为增强图像的第i个像素值,为目标增强图像的第i个像素值;
47、第六步、使用反向传播算法更新网络参数w和b:
48、,
49、其中,为学习率。
50、优选的,所述步骤6中的算法涉及自适应光学增强系统,结合图像处理结果和环境光信息,动态调整相机的光学元件设置,如下是算法步骤:
51、a.获取深度神经网络模型处理后的图像,分析其细节和亮度信息;
52、b.实时获取环境的光照条件;
53、c.根据图像处理结果和环境光信息,计算要调整的光学元件参数;
54、d.调整相机的光学元件设置;
55、e.在调整光学设置后,可再次进行图像采集。
56、优选的,所述步骤6中算法步骤中的算法公式如下:
57、获取深度神经网络模型处理后的图像,计算图像的平均亮度和细节水平,其算法公式:
58、,
59、其中,为增强图像的第i个像素值,n为图像的总像素数;
60、基于图像处理结果和环境光信息,计算光学元件参数,其算法公式:
61、,
62、其中,和为控制参数,为目标亮度,为目标环境光强度;
63、,
64、其中,为控制参数,为目标细节水平,为细节水平,可通过图像梯度计算,图像梯度的算法公式:
65、,
66、调整光学元件的光圈大小和焦距。
67、优选的,所述步骤8中的算法涉及建立反馈机制,根据实际应用效果和环境变化,持续优化自动曝光控制、图像融合算法和深度学习模型,如下是反馈机制的算法步骤:
68、a.图像质量评估:评估处理后图像的质量;
69、b.误差计算:计算图像质量与目标质量间的误差;
70、c.参数调整:根据误差调整各算法模块的参数;
71、d.模型更新:通过在线学习或定期重新训练,更新深度学习模型;
72、e.系统迭代:在参数和模型基础上重新进行图像处理。
73、优选的,所述反馈机制算法步骤中的算法公式如下:
74、评估图像质量可使用峰值信噪比和结构相似性指数,其算法公式:
75、,
76、其中,为图像的最大像素值,均方误差为:
77、,
78、结构相似性指数计算公式:
79、,
80、其中,和为图像x和y的平均值,和为图像x和y的方差,为图像x和y的协方差,和是稳定常数;
81、计算图像质量与目标图像质量间的误差:
82、,
83、根据图像质量误差调整曝光时间t和增益g:
84、,
85、其中,和是控制参数。
86、根据图像质量误差调整多帧融合的权重:
87、,
88、其中,是控制参数。
89、本发明提供一种工业相机采集的处理方法。具备以下有益效果:
90、1、本发明通过开发专门针对低光环境的深度神经网络模型,能自动学习和优化低光图像处理的特征,有效提高图像的清晰度和细节表现,且采用多帧信息融合技术,结合多帧低光图像数据进行图像重建和增强,能显著减少图像噪声,增强图像细节,生成更清晰、更高质量的图像输出。
91、2、本发明通过开发的智能自动曝光控制系统能实时分析低光环境下的图像信息,动态调整曝光时间和增益设置,有效优化图像质量,避免曝光不足或过度曝光造成的图像失真,而提出的自适应光学增强系统可根据实时图像数据和环境光条件,动态调整相机的光学元件设置,提高光线采集效率,进一步减少低光环境下的图像噪声。
92、3、本发明通过建立反馈机制,系统能根据实际应用效果和环境变化,持续优化自动曝光控制、图像融合算法和深度学习模型,确保系统在不同条件下始终保持最佳性能,而高效的图像对齐和融合算法,可在短时间内完成多帧图像的采集、对齐和融合处理,提高图像处理效率。
93、4、本发明通过利用人工智能和机器学习技术,使得工业相机系统具备自学习、自适应和自优化能力,提升系统的智能化程度和自动化水平,且高质量的图像能为后续的图像分析和处理提供更可靠的基础数据,提升工业生产过程中的检测、监控和控制精度,而提高整体生产效率和产品质量。
- 还没有人留言评论。精彩留言会获得点赞!