一种实现双扫描模式的扫描芯片、扫描仪、扫描系统及扫描方法与流程
本技术涉及三维扫描,尤其涉及一种实现双扫描模式的扫描芯片、扫描仪、扫描系统及扫描方法。
背景技术:
1、手持式扫描仪是一种是三维数据采集设备,其通常与应用于上位机的建模构建成三维扫描系统,其中,集成了投影模组及摄像头等硬件的手持扫描仪用于对扫描对象进行扫描得到扫描对象的图像数据,而应用于上位机中的建模软件则负责处理扫描仪采集的图像数据得到扫描对象的三维模型。
2、在现有技术中,手持扫描仪的扫描技术主要依赖于激光线扫描原理或条纹扫描原理,其中:激光线扫描原理为在单帧采集周期内通过投影模组发射一束或多束激光线至扫描对象表面部分区域,摄像头捕捉经部分区域反射回的激光线生成激光线图像并传输至上位机,上位机通过三角测量法计算扫描对象的三维信息进而重建扫描对象的三维模型;条纹扫描原理则是通过投影模组向物体表面投射一系列条纹图案至扫描对象,摄像头捕捉投影至扫描对象表面的条纹图案生成条纹图像并上传至上位机,上位机基于捕捉的条纹图像计算条纹图案的相位变化以获取扫描对象的三维信息进而重建扫描对象的三维模型。
3、具体而言,现有手持式扫描仪一般不支持对其采集的图像数据进行深度计算处理得到扫描对象的三维信息,进而传输扫描对象的三维信息至上位机进行处理得到扫描对象的三维模型,其通常是将图像直接传输至上位机以供上位机中的建模软件进行处理得到扫描对象的三维模型,因此对于多目成像的手持扫描仪,相较于前者在扫描端对多目采集图像进行深度计算后上传的处理方式,后者直接传输图像的处理方式会导致大量图像数据需要传输,对输出接口带宽要求较高。
4、进一步地,基于激光线扫描原理或条纹扫描原理的手持扫描仪虽然均能提供高精度的扫描结果,但两者耗时长,重建效率低,例如基于先扫描投影的激光线在单帧采集周期内投影的激光线仅能覆盖扫描对象较小区域,也即采集的每帧图像包括扫描对象的信息较少且需上传图像的全部信息,若需获取扫描对象的全部信息则需在多个采集周期多次向扫描对象不同区域投影激光线并采集多帧图像以获取扫描对象的三维模型,进而导致处理数据量大;而鉴于相位周期性特性,在利用基于条纹扫描原理的手持扫描仪得到条纹图像获取扫描对象的三维模型时会涉及相位包裹现象,因此在计算条纹相位变化时需要涉及解包裹(phase unwrapping)技术,进而导致计算量增大。
5、再者,现有的手持扫描仪实现的均是高精度的扫描结果,但不同扫描对象或场景对三维扫描仪的性能要求不同,例如工业设计场景需要高精度的三维扫描仪,3d打印场景则需要对物体完成快速扫描的三维扫描仪。对于现有的仅基于单个扫描原理的三维扫描仪而言,其无法满足扫描物体、场景的多样性,难以适应所有的扫描对象或场景。
技术实现思路
1、本技术提供一种实现双扫描模式的扫描芯片、扫描仪、扫描系统及扫描方法,能够满足多场景的三维扫描需求,有利于三维扫描仪的推广应用,降低三维扫描成本。
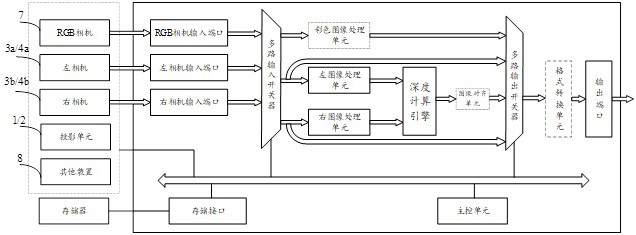
2、第一方面,本技术提供一种应用于三维扫描仪的扫描芯片,用于对三维扫描仪采集的左、右特征图像进行处理以实现快速扫描模式和/或高精度扫描模式,扫描芯片包括图像输入端口、多路输入开关器、深度计算引擎及输出端口,左、右特征图像包括左、右散斑图像和/或左、右多线图像:图像输入端口,用于接收左、右特征图像进入多路输入开关器;多路输入开关器,选择性允许左、右特征图像进入深度计算引擎以实现快速扫描模式和/或高精度扫描模式;若多路输入开关器允许左、右特征图像进入深度计算引擎以实现快速扫描模式时,当左、右特征图像包括左、右散斑图像时,深度计算引擎用于对左、右散斑图像进行立体匹配得到视差图或深度图并经输出端口进行输出;或,当左右特征图像包括左、右多线图像时,深度计算引擎用于对左、右多线图像进行光条提取得到左、右感兴趣图像并经输出端口进行输出;或,若多路输入开关器不允许左、右特征图像进入深度计算引擎以实现高精度扫描模式时,多路输入开关器允许左、右特征图像经输出端口进行输出。
3、第二方面,本技术提供了一种三维扫描仪,用于响应扫描模式对扫描对象进行扫描得到扫描对象的多帧图像数据,扫描模式包括高精度扫描模式和/或快速扫描模式;其中,三维扫描仪包括发射端、接收端和扫描芯片:发射端包括投影单元,用于向扫描对象投影散斑图案光束和/或多线图案光束;接收端包括左、右相机,左、右相机用于采集经扫描对象反射回的光束形成左、右散斑图像和/或左、右多线图像;扫描芯片包括图像输入端口、多路输入开关器、深度计算引擎及输出端口,图像输入端口用于接收左、右特征图像进入多路输入开关器;多路输入开关器,选择性允许左、右特征图像进入深度计算引擎以实现快速扫描模式和/或高精度扫描模式;其中:若多路输入开关器允许左、右特征图像进入深度计算引擎以实现快速扫描模式时,当左、右特征图像包括左、右散斑图像时,深度计算引擎用于对左、右散斑图像进行立体匹配得到视差图或深度图并经输出端口进行输出;或,当左右特征图像包括左、右多线图像时,深度计算引擎用于对左、右多线图像进行光条提取得到左、右感兴趣图像并经输出端口进行输出;或,若多路输入开关器不允许左、右特征图像进入深度计算引擎以实现高精度扫描模式时,多路输入开关器允许左、右特征图像经输出端口进行输出。
4、第三方面,本技术提供了一种三维扫描系统,包括第二方面的三维扫描仪及应用于上位机的建模软件,其中,三维扫描仪用于响应不同扫描模式对扫描对象进行扫描得到扫描对象的左、右特征图像或得到扫描对象的左、右特征图像及纹理图像,不同扫描模式包括高精度扫描模式和/或快速扫描模式,左、右特征图像包括左、右散斑图像和/或左、右多线图像;当三维扫描仪中的多路输入开关器允许左、右特征图像进入深度计算引擎以实现高精度扫描模式或快速扫描模式时,建模软件根据三维扫描仪得到的左、右特征图像或左、右感兴趣图像进行三维重建得到扫描对象的无纹理三维模型;或,接收基于三维扫描仪得到的左、右特征图像或左、右感兴趣图像与纹理图像并利用左、右特征图像及纹理图像进行三维重建得到扫描对象的纹理三维模型;当三维扫描仪中的多路输入开关器不允许左、右特征图像进入深度计算引擎以实现高精度扫描模式时,建模软件根据三维扫描仪得到的视差图或深度图或左右感兴趣图像进行三维重建得到扫描对象的无纹理三维模型;或,根据三维扫描仪得到的视差图或深度图或左右感兴趣图像与纹理图像三维重建得到扫描对象的纹理三维模型。
5、第四方面,本技术提供了一种三维扫描方法,应用于包括深度计算引擎的三维扫描仪及应用于上位机的建模软件中,方法包括:向扫描对象投影包括散斑图案光束和/或多线图案光束的特征图案光束,并采集经扫描对象反射回的光束形成左、右特征图像,左、右特征图像包括左、右散斑图像和/或左、右多线图像;选择性允许左、右特征图像进入深度计算引擎以响应于扫描模式对左、右特征图像进行处理,扫描模式包括高精度扫描模式和/或快速扫描模式,其中:当不允许左、右特征图像进入深度计算引擎时,扫描模式为高精度扫描模式,直接输出左、右特征图像至建模软件以利用左、右特征图像进行三维重建得到扫描对象的三维模型;当允许左、右散斑图像进入深度计算引擎时,扫描模式为快速扫描模式,当左、右特征图像为左、右散斑图像时,通过深度计算引擎对左、右散斑图像进行立体匹配得到视差图或深度图并输出至建模软件以利用视差图或深度图进行三维重建得到扫描对象的三维模型;和/或,当左、右特征图像为左、右多线图像时,通过深度计算引擎对左、右多线图像进行光条提取得到左、右感兴趣图像并输出至建模软件以利用左、右感兴趣图像进行三维重建得到扫描对象的三维模型。
6、第五方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,执行计算机程序时,实现如第四方面的三维扫描方法。
7、与现有技术相比,本技术提供的扫描芯片包括左、右图像数据端口、一多路输入开关器及一深度计算引擎,其中,扫描芯片中的左右图像输入端口支持左右特征图像的同时输入,结合多路输入开关器的选择功能选择性允许深度计算引擎实现快速扫描模式或高精度扫描模式,通过允许输入的左右特征图像直接输出至上位机,以供上位机直接利用扫描仪采集的原始图像进行高精度三维重建以实现高精度扫描模式;又或允许输入的左右特征图像进入深度计算引擎,以供深度计算引擎对左右特征图像进行立体匹配处理得到单帧深度图像或对左右特征图像进行光条提取以得到仅包括感兴趣区域的左右感兴趣图像并输出至上位机以实现快速扫描模式,如此将单独两帧图像变为单帧图像输出或剔除图像中的冗余信息,不仅减少扫描仪向上位机输出图像数据量,提高了图像传输效率,还降低了对输出接口带宽的要求。
8、进一步地,在单帧采集周期内,应用上述扫描芯片的三维扫描仪既可以投影多线图案光束或投影散斑图案光束,又或两者兼顾,当两者兼顾时,扫描芯片中的多路输入开关器还均允许三维扫描仪采集对应的左、右多线图像或左、右散斑图像均进入深度计算引擎,深度计算引擎对左、右多线图像进行光条提取处理得到左、右感兴趣图像输出至上位机以实现高精度扫描模式,对左、右散斑图像进行立体匹配得到视差图或深度图并输出至上位机以实现快速扫描模式。相对于多线图案光束投影而言,当三维扫描仪中的发射端投影散斑图案光束时,能覆盖扫描对象大部分区域并被接收端的左、右相机同时采集得到包括扫描对象更多区域信息的左右散斑图像,进而实现以较少数量的图像帧获取扫描对象更多的三维信息,快速获取扫描对象全部区域的信息,提高扫描效率以实现快速扫描模式;而当发射端投影多线图案光束时,能捕捉扫描对象更细小的表面特征以实现高精度扫描模式,进而使得本技术所提供的包括上述扫描芯片及不同投影图案光束的三维扫描仪能实现具有不同测量精度的高精度扫描模式及快速扫描模式,以适应不同应用场景的精度需求。
- 还没有人留言评论。精彩留言会获得点赞!